


El robot seguidor de línea más fácil
Componentes y suministros
 |
| × | 1 | |||
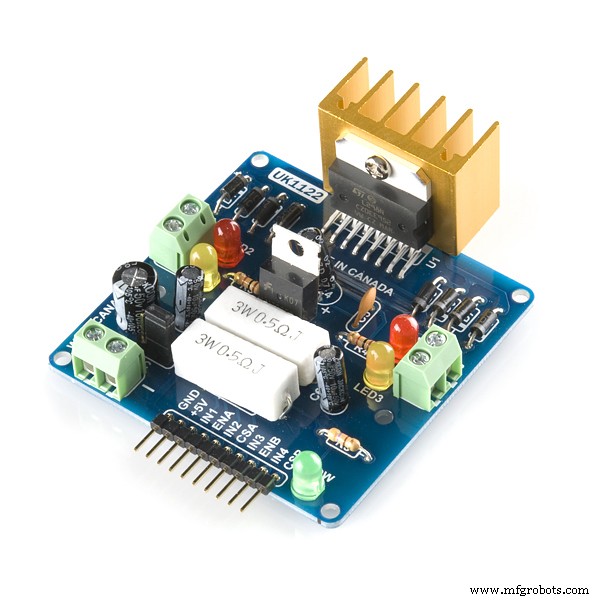 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
| ||||
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
El robot seguidor de línea es hola mundo a la arena de la robótica. Este seguidor de línea es un robot muy simple y fácil de construir.
Código
- Robot seguidor de línea basado en Arduino
Robot seguidor de línea basado en Arduino C / C ++
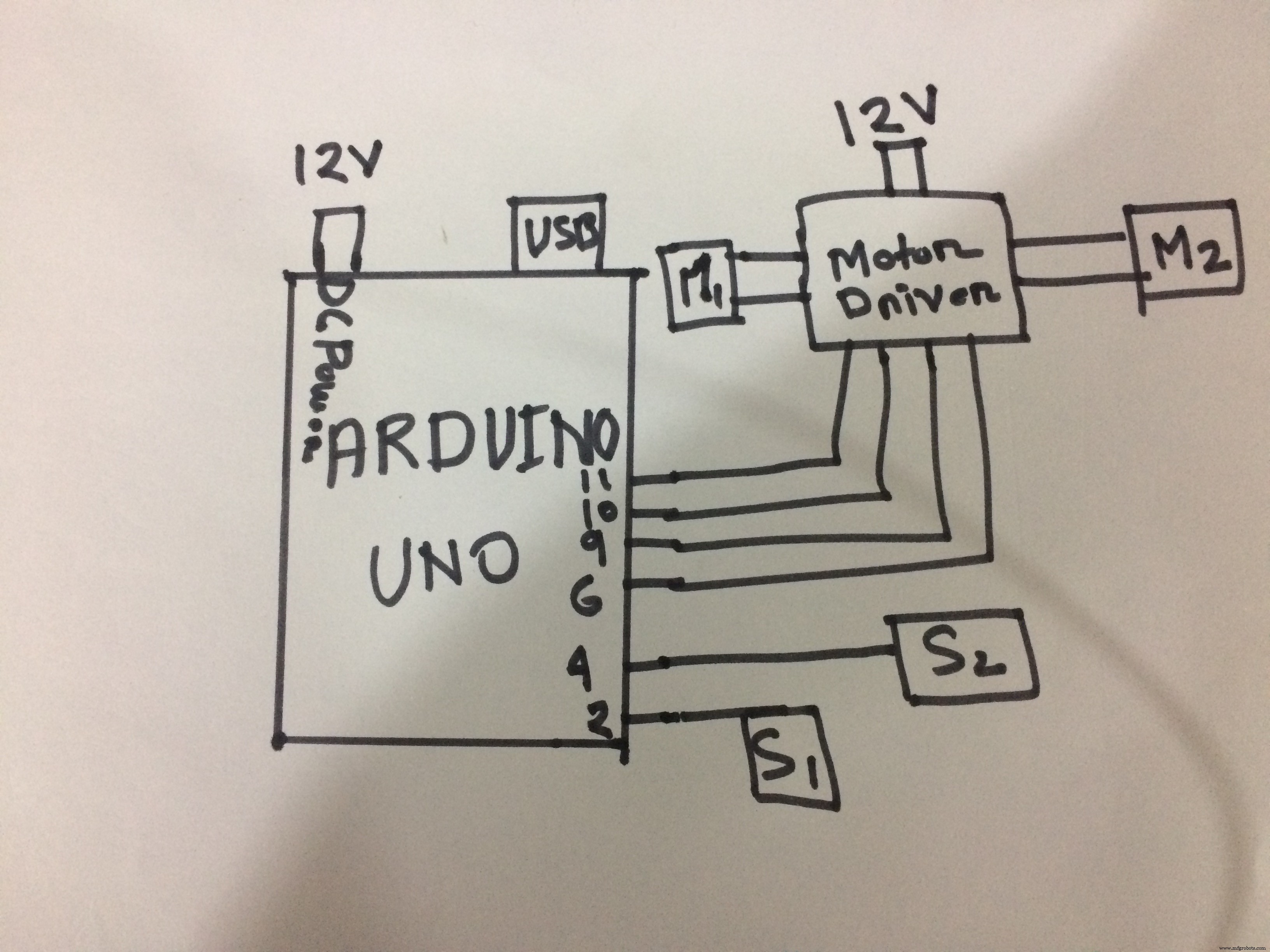
/ * ------- definiendo Entradas ------ * / # define LS 2 // sensor izquierdo # define RS 5 // sensor derecho / * ------- definiendo Salidas- ----- * / # define LM1 11 // motor izquierdo # define LM2 10 // motor izquierdo # define RM1 9 // motor derecho # define RM2 6 // configuración del vacío del motor derecho () {pinMode (LS, INPUT); pinMode (RS, ENTRADA); pinMode (LM1, SALIDA); pinMode (LM2, SALIDA); pinMode (RM1, SALIDA); pinMode (RM2, SALIDA);} bucle vacío () {if ((digitalRead (LS) ==LOW) &&(digitalRead (RS) ==LOW)) // Condition_1 stop {MoveForward (); } if ((digitalRead (LS) ==HIGH) &&(digitalRead (RS) ==HIGH)) // CONDITION-2 FORWRD {Stop (); } if ((digitalRead (LS) ==LOW) &&(digitalRead (RS) ==HIGH)) // DERECHA {TurnLeft (); } if ((digitalRead (LS) ==HIGH) &&(digitalRead (RS) ==LOW)) {TurnRight (); }} anular MoveForward () {analogWrite (LM1, 50); analogWrite (LM2, 0); analogWrite (RM1, 50); analogWrite (RM2, 0); delay (20);} void TurnRight () {analogWrite (LM1, 0); analogWrite (LM2, 60); analogWrite (RM1, 60); analogWrite (RM2, 0); retraso (30); } void TurnLeft () {analogWrite (LM1, 60); analogWrite (LM2, 0); analogWrite (RM1, 0); analogWrite (RM2, 60); delay (30);} void Stop () {analogWrite (LM1, 0); analogWrite (LM2, 0); analogWrite (RM1, 0); analogWrite (RM2, 0); retraso (20);} Esquemas
Proceso de manufactura
- Dados digitales Arduino
- Iron Man
- Robot seguidor de línea de velocidad V4
- Encuéntrame
- Robot seguidor de línea
- Brazo robótico Arduino impreso en 3D
- Control del humidificador Arduino
- Robot controlado por voz
- MobBob:Robot Arduino DIY controlado por un teléfono inteligente Android
- Robot de piano controlado por Arduino:PiBot
- NeoMatrix Arduino Pong