


Robot de selección y colocación controlado por Bluetooth
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
Introducción
Este tutorial demuestra cómo construir un robot de selección y colocación controlado con su teléfono inteligente Android. Hemos creado una aplicación móvil utilizando la plataforma MIT App Inventor. En este tutorial, hablaremos de cada parte de este proyecto por separado. Hablaremos de:
- 1 Cómo controlar un servomotor
- 2 Cómo controlar un motor de CC
- 3 Cómo utilizar el módulo Bluetooth
- 4 Cómo controlar su robot con su teléfono móvil
Así que espero que este tutorial cubra todas sus necesidades para construir su bot.
El escenario
En primer lugar, debemos saber cómo tomará las órdenes el robot. Estamos utilizando un módulo Bluetooth que se conectará a una aplicación móvil, que crearemos posteriormente. Por ahora necesitamos saber que enviaremos nuestro comando al robot con nuestro móvil usando la conexión Bluetooth.

Hardware
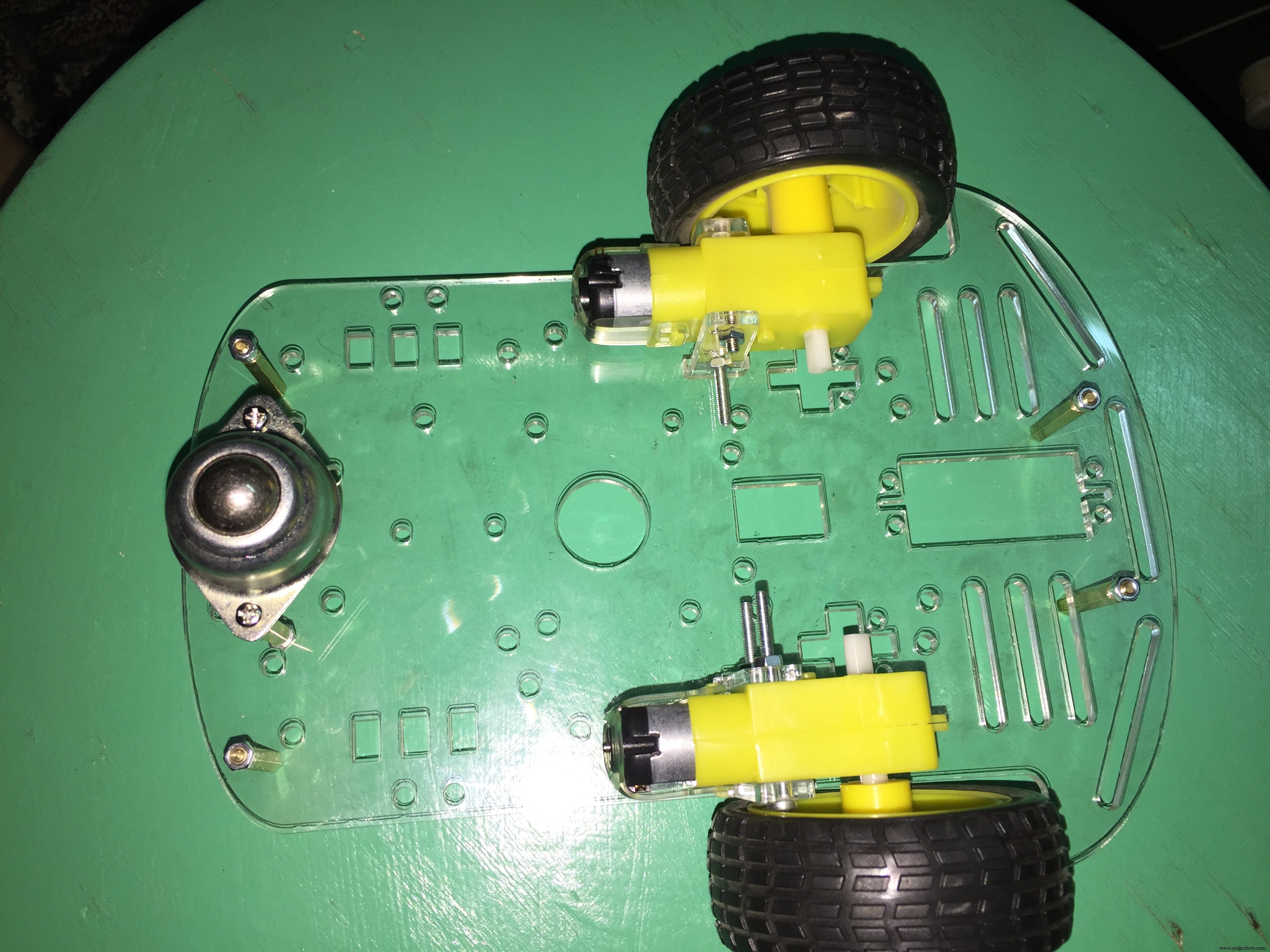
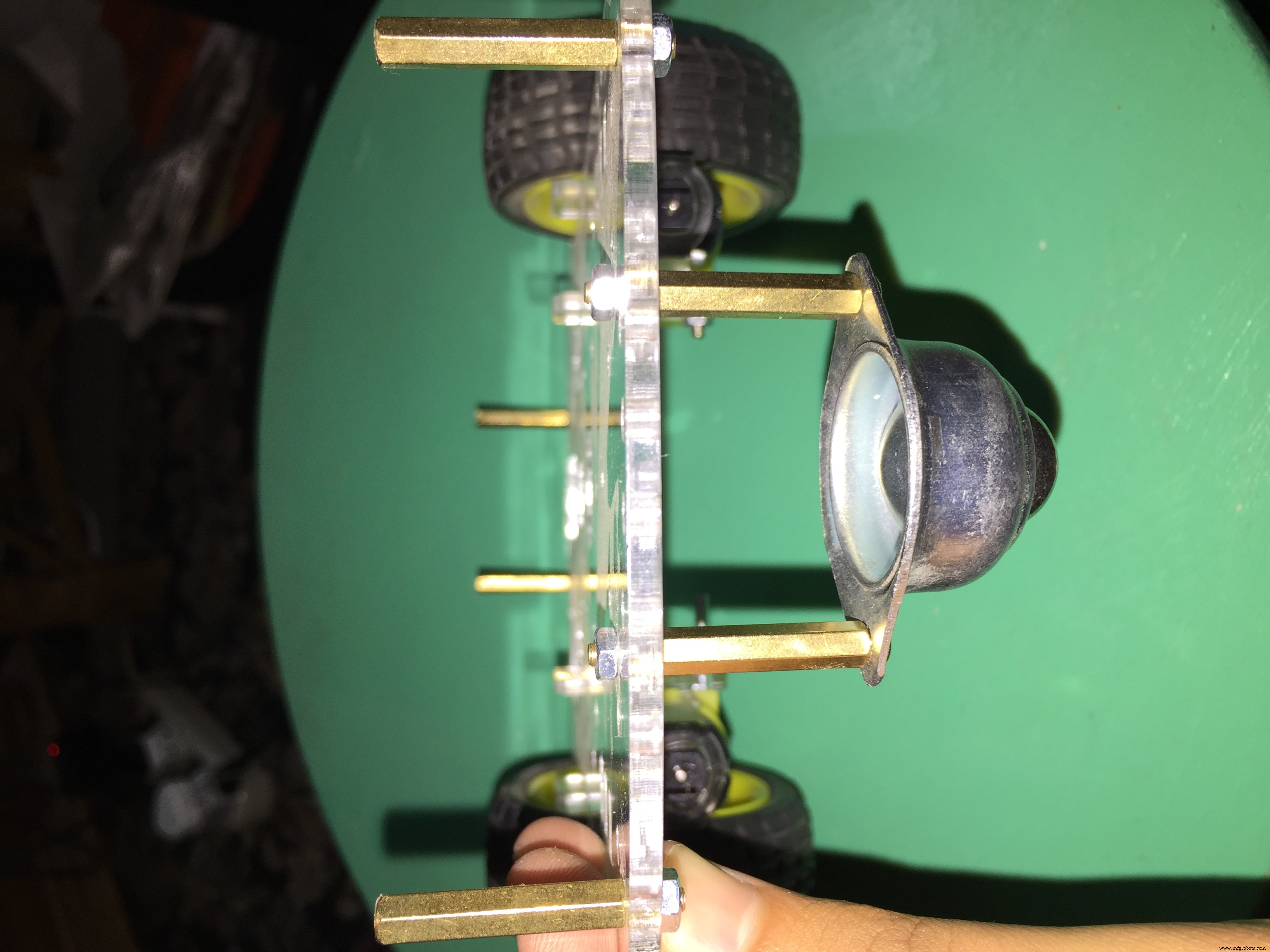
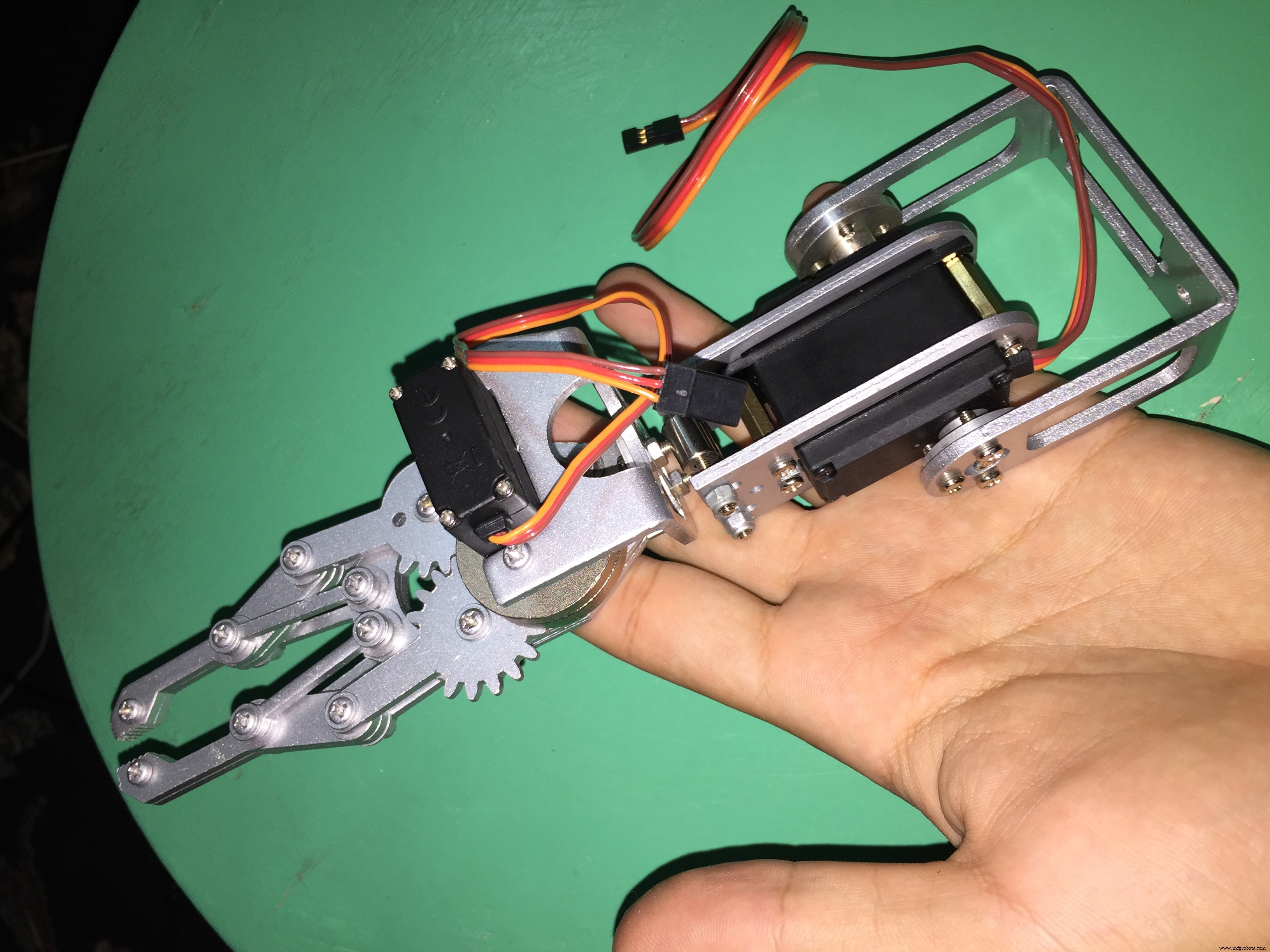
- El kit requiere un montaje sencillo, pero lleva algo de tiempo. Siga las instrucciones incluidas con su kit para el montaje.
Al final del ensamblaje, debería verse así:
El Motor Shield le permite hablar con sus motores. Si conecta los motores directamente a la placa Arduino, ¡se iniciará un incendio! porque cada motor necesita al menos 80MA, pero la corriente máxima que puede proporcionar el pin Arduino digital es 40MA, así que NO intente conectar el motor directamente a su placa Arduino.
- El escudo del motor le ayuda a controlar la dirección de su motor (por ejemplo, moverse HACIA ADELANTE, HACIA ATRÁS y LIBERAR).
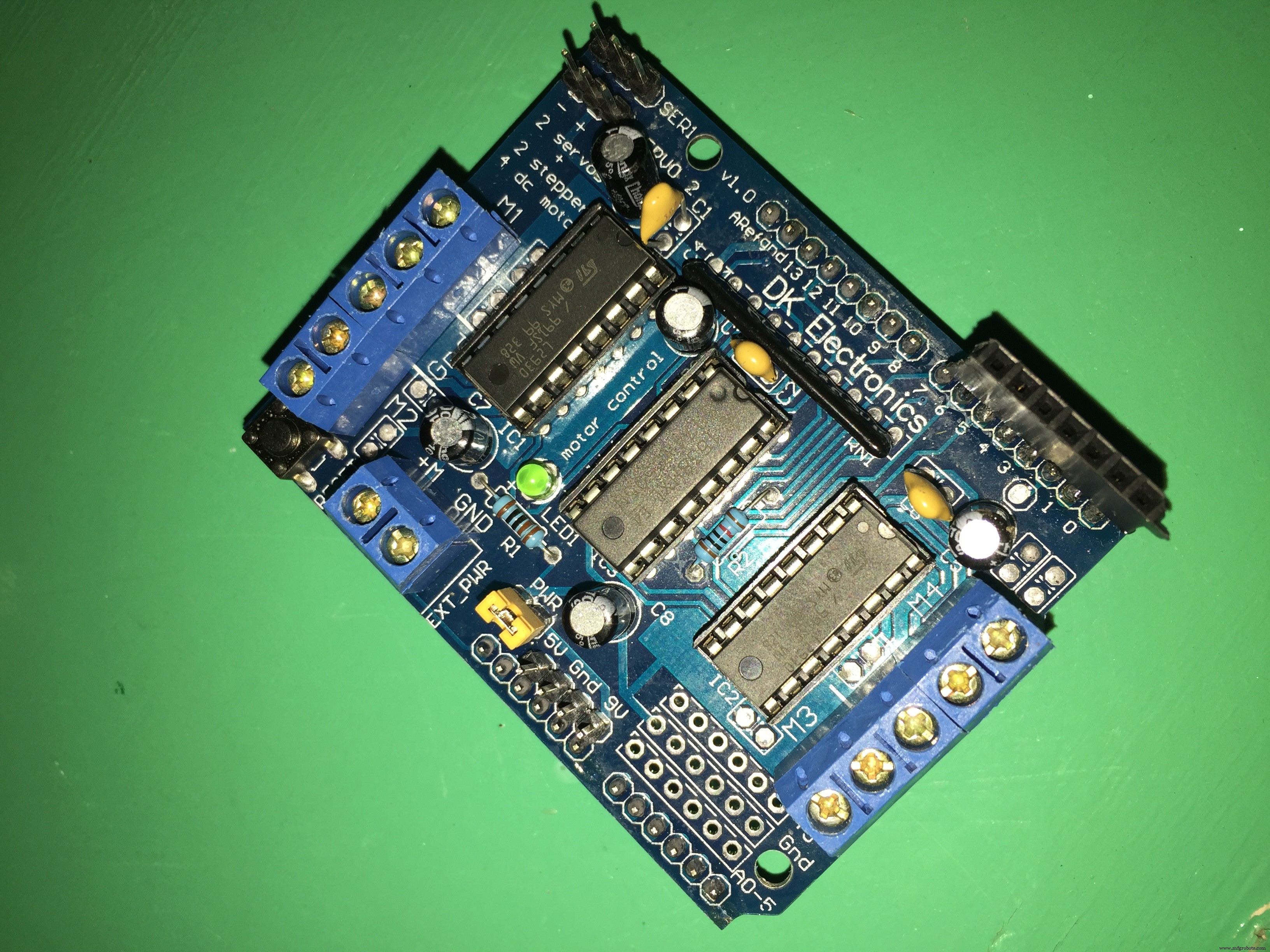
- El escudo del motor le permite controlar hasta 4 CD bidireccionales motores con selección individual de velocidad de 8 bits (por lo tanto, aproximadamente 0.5% de resolución).
Puede soldar algunos encabezados de pines en la parte superior del escudo para poder usar los pines de Arduino.
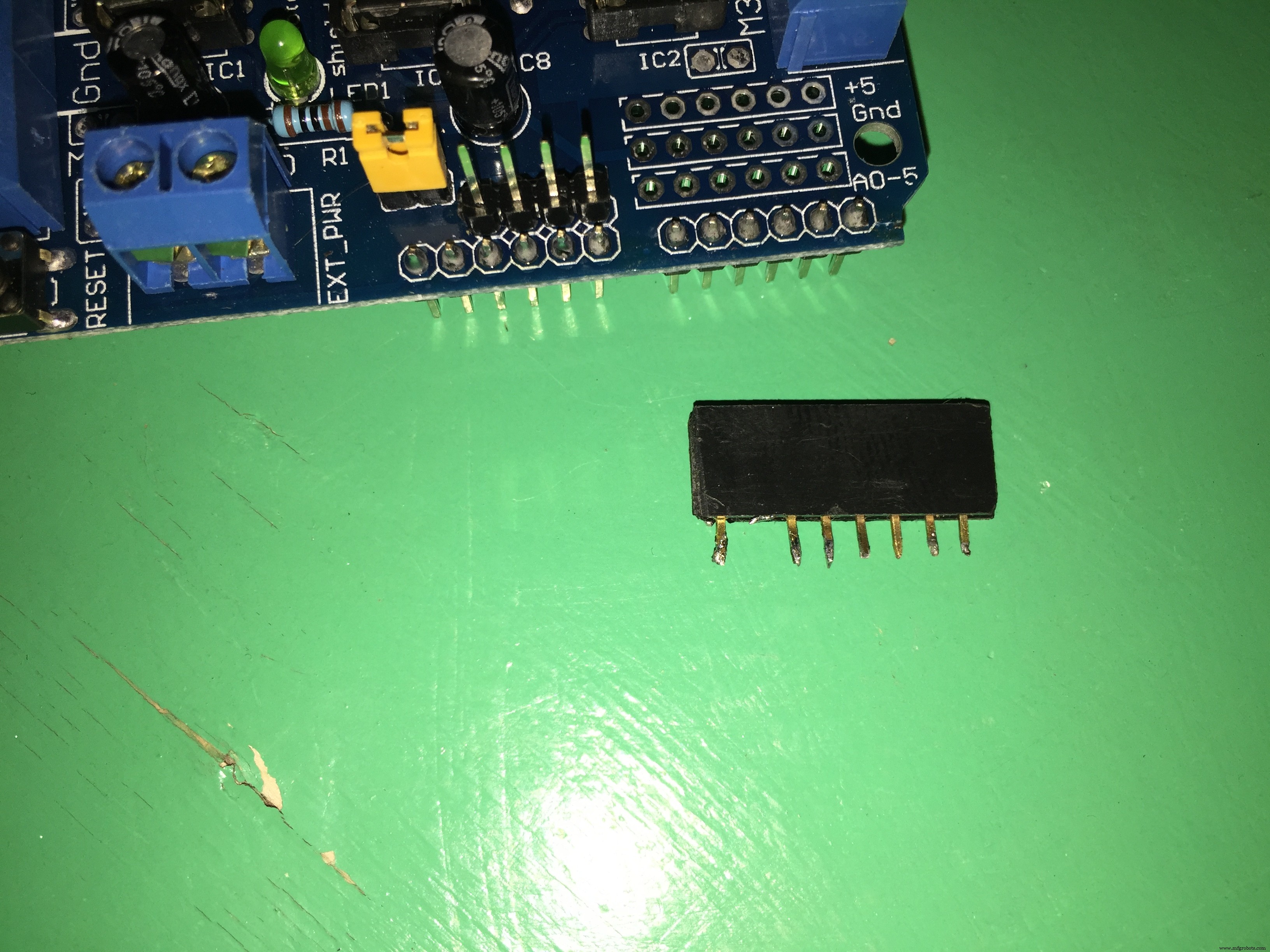

Debe colocar el protector de su motor sobre su placa Arduino de esta manera:
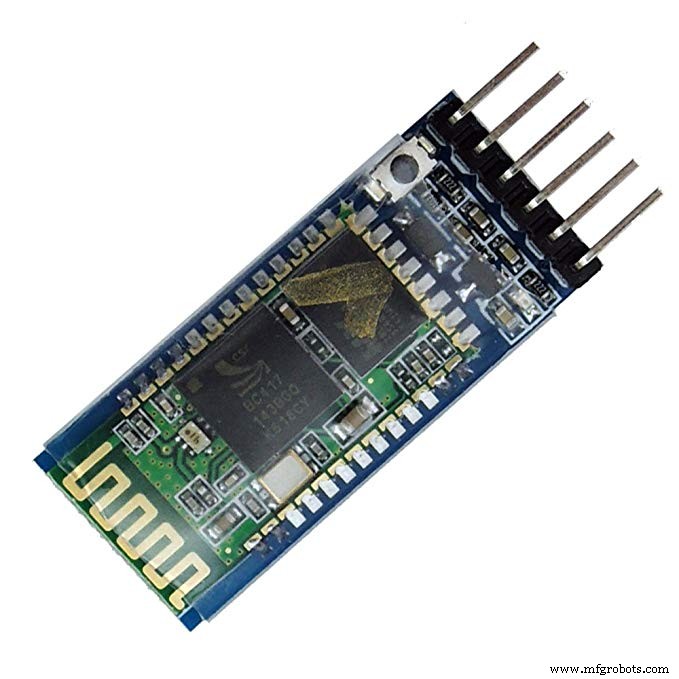
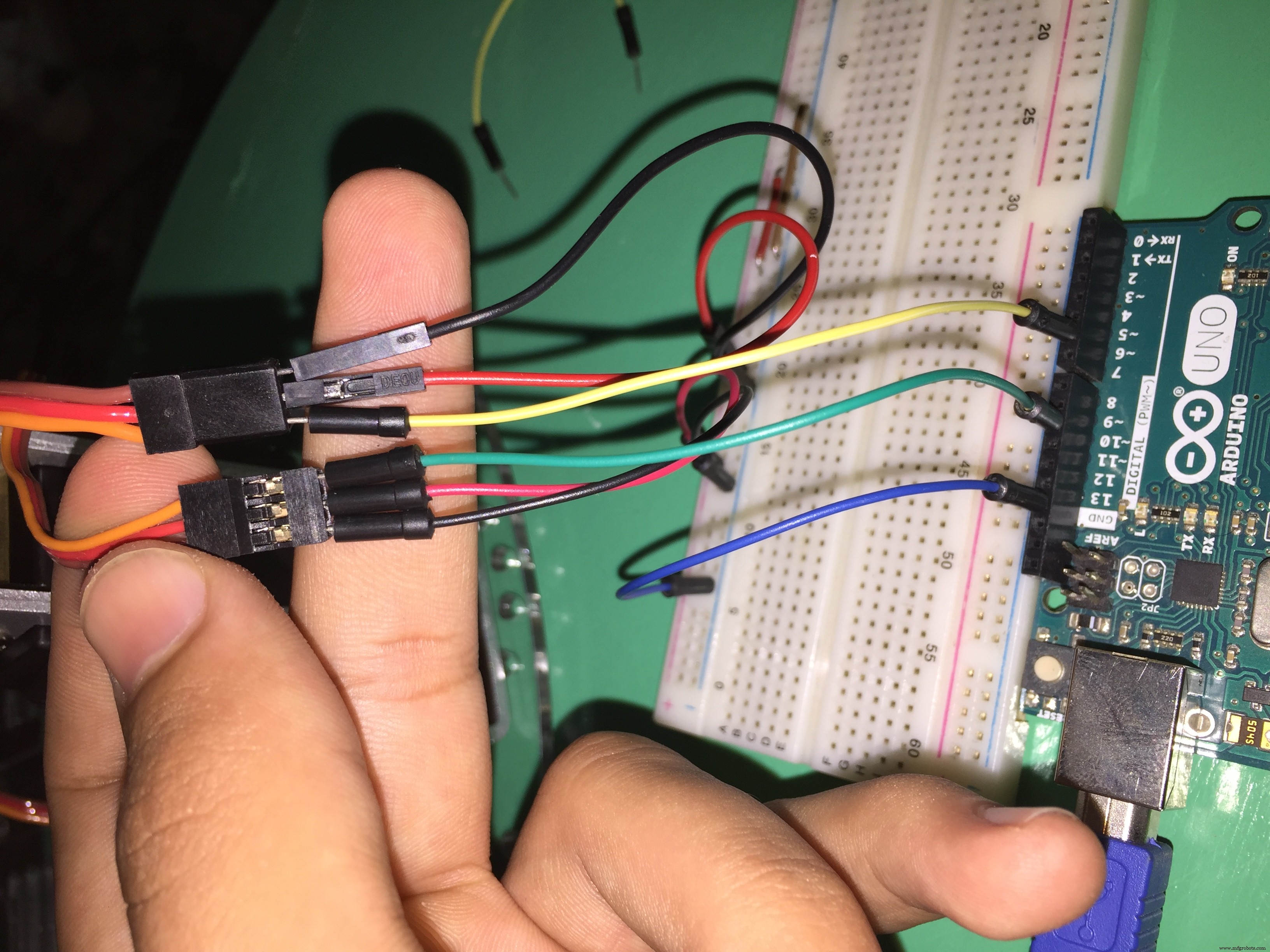
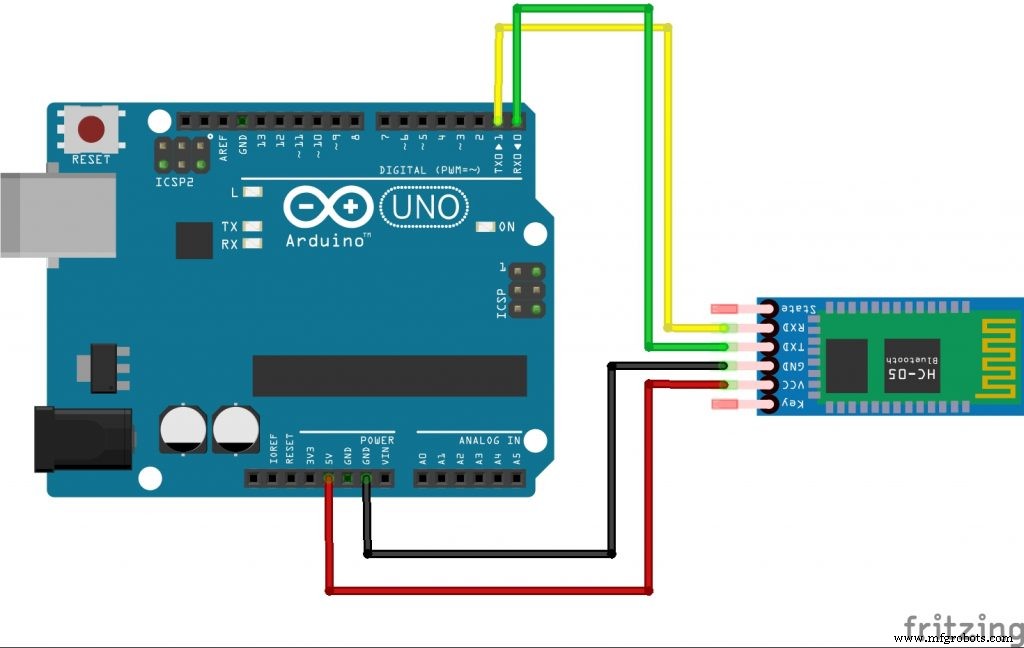
El módulo Bluetooth :es el canal entre el piloto y el robot para enviar órdenes y realizar acciones.
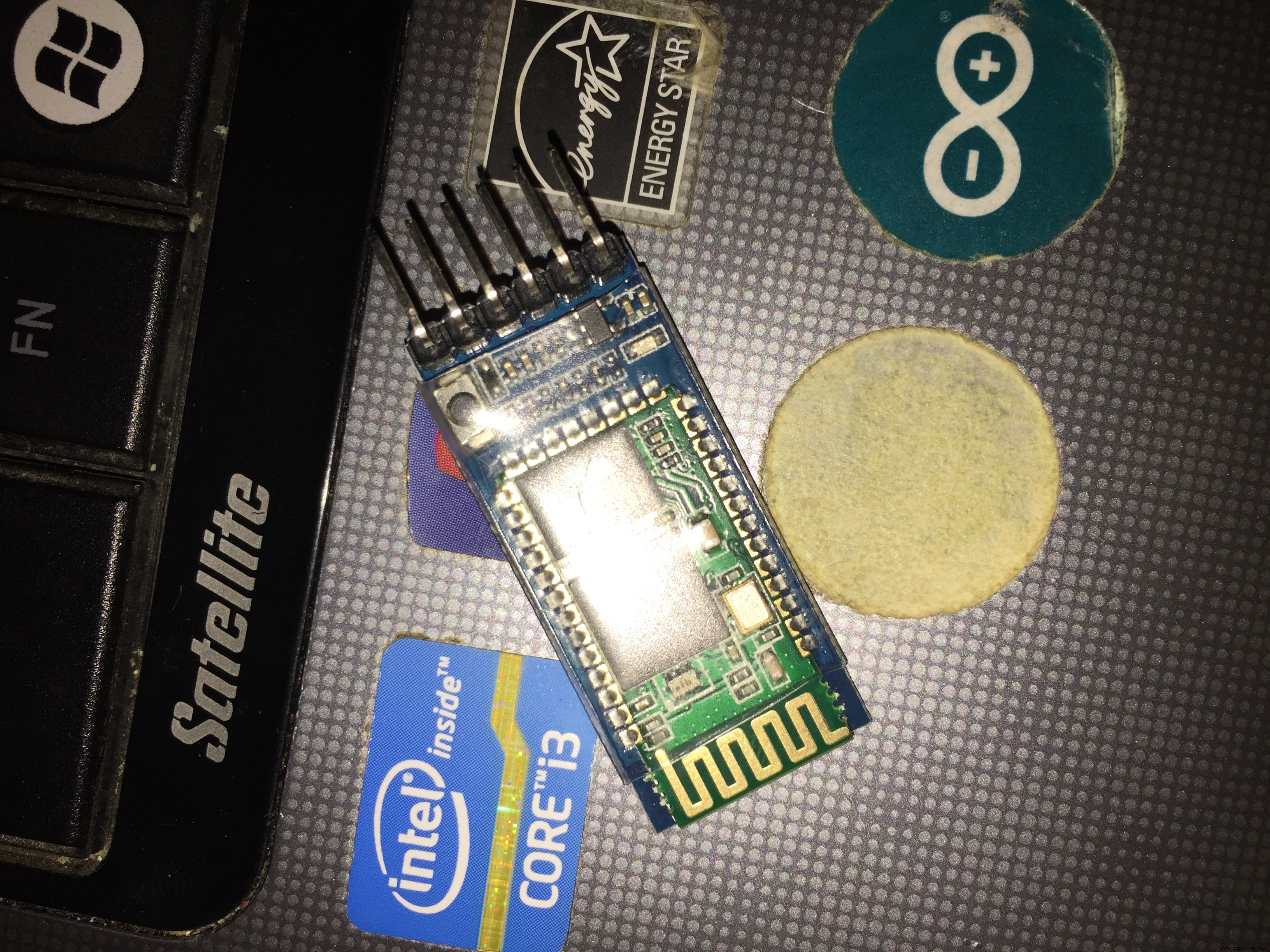
Tiene 6 pines; Usaremos solo los cuatro pines del medio (RX-TX-GND- + 5):

Conectaremos:
- +5 en el módulo Bluetooth al 5v en el Arduino
- GND en el módulo Bluetooth al GND en Arduino
- Rx en el módulo Bluetooth al Tx en Arduino
- Tx en el módulo Bluetooth al Rx en Arduino

NOTA:¿POR QUÉ Rx a Tx y Tx a Rx?
Porque el módulo Bluetooth envía datos (Tx) y el Arduino recibe estos datos (Rx).
Uno envía y el otro recibe
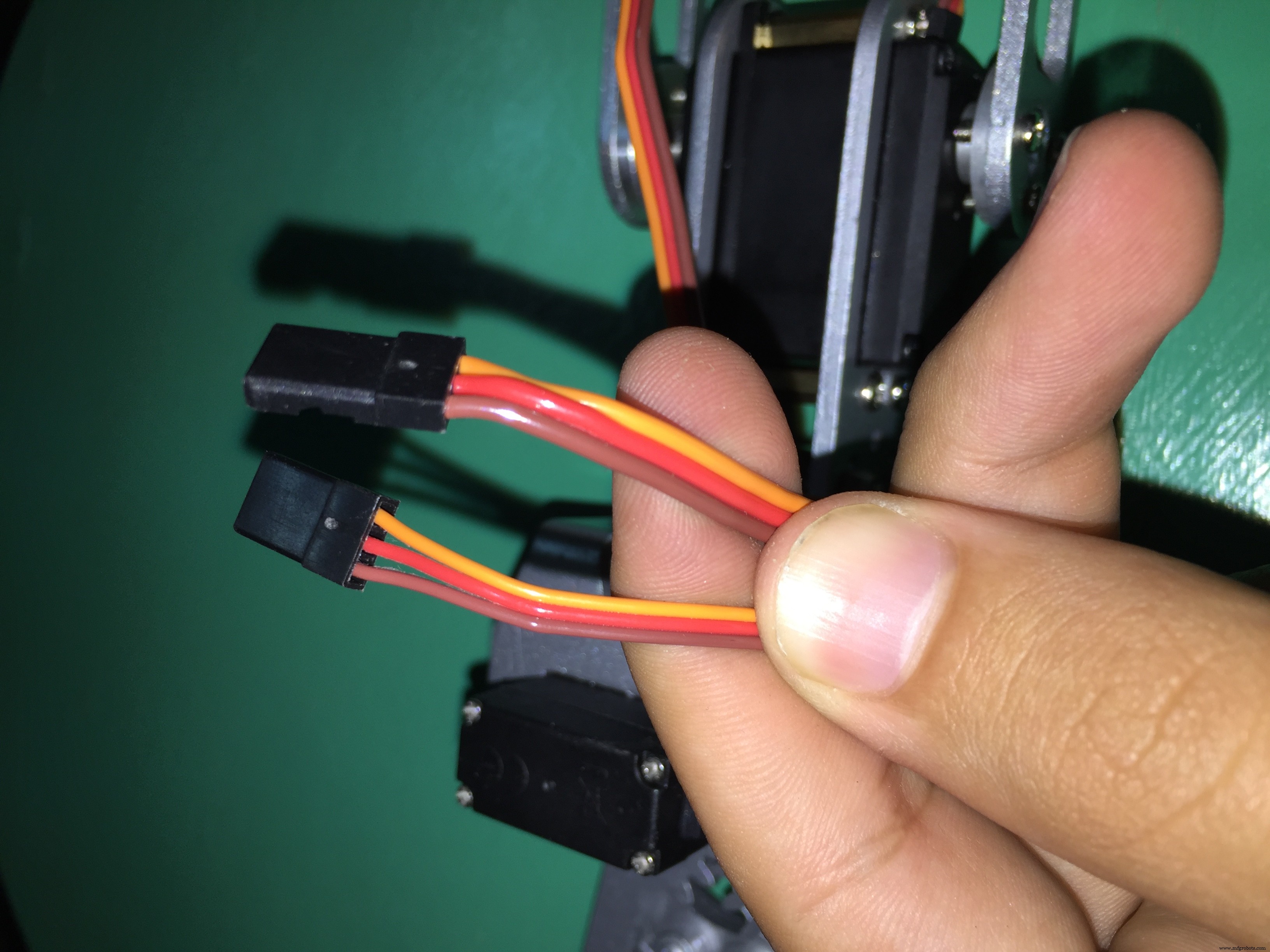
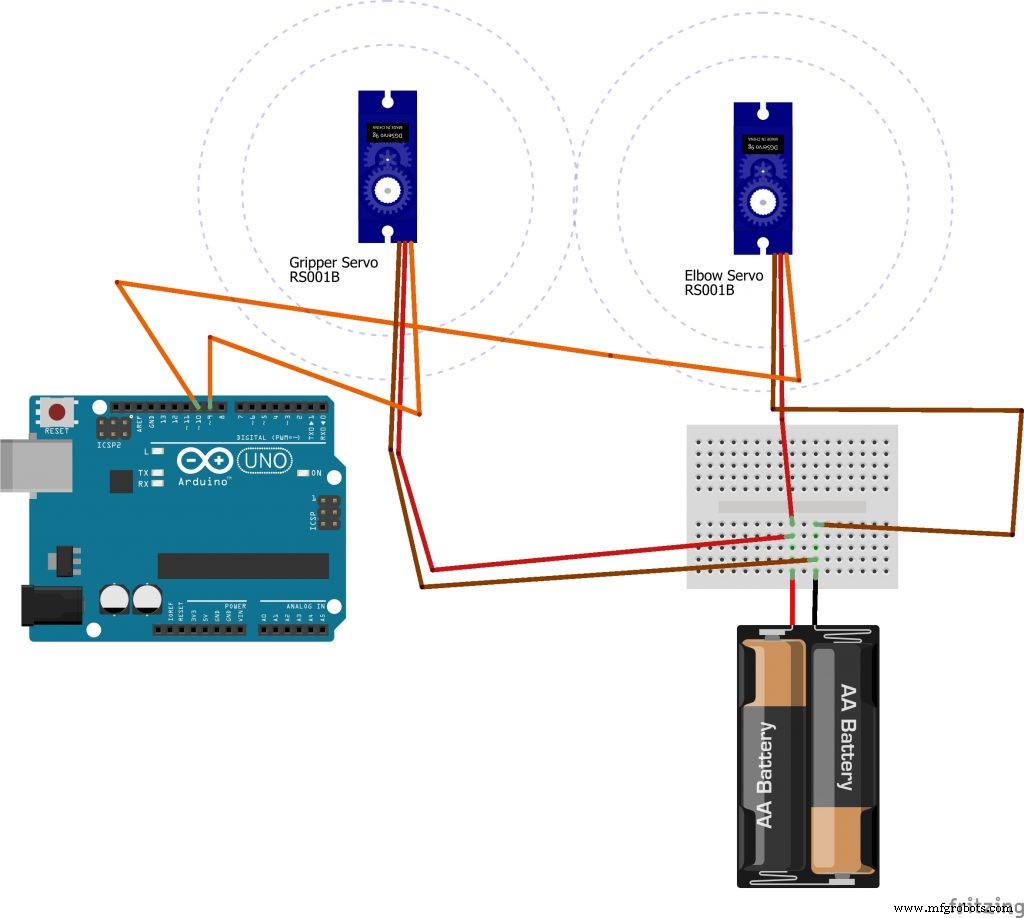
4) El servomotor tiene 3 cables:rojo (positivo), marrón (negativo), amarillo o naranja (señal).
Nota:HACER NO conecte el positivo y negativo de los servomotores a los 5V y GND de la placa Arduino. La placa Arduino iniciar un fuego debido a la alta corriente absorbida por los motores; utilizar el batería externa.
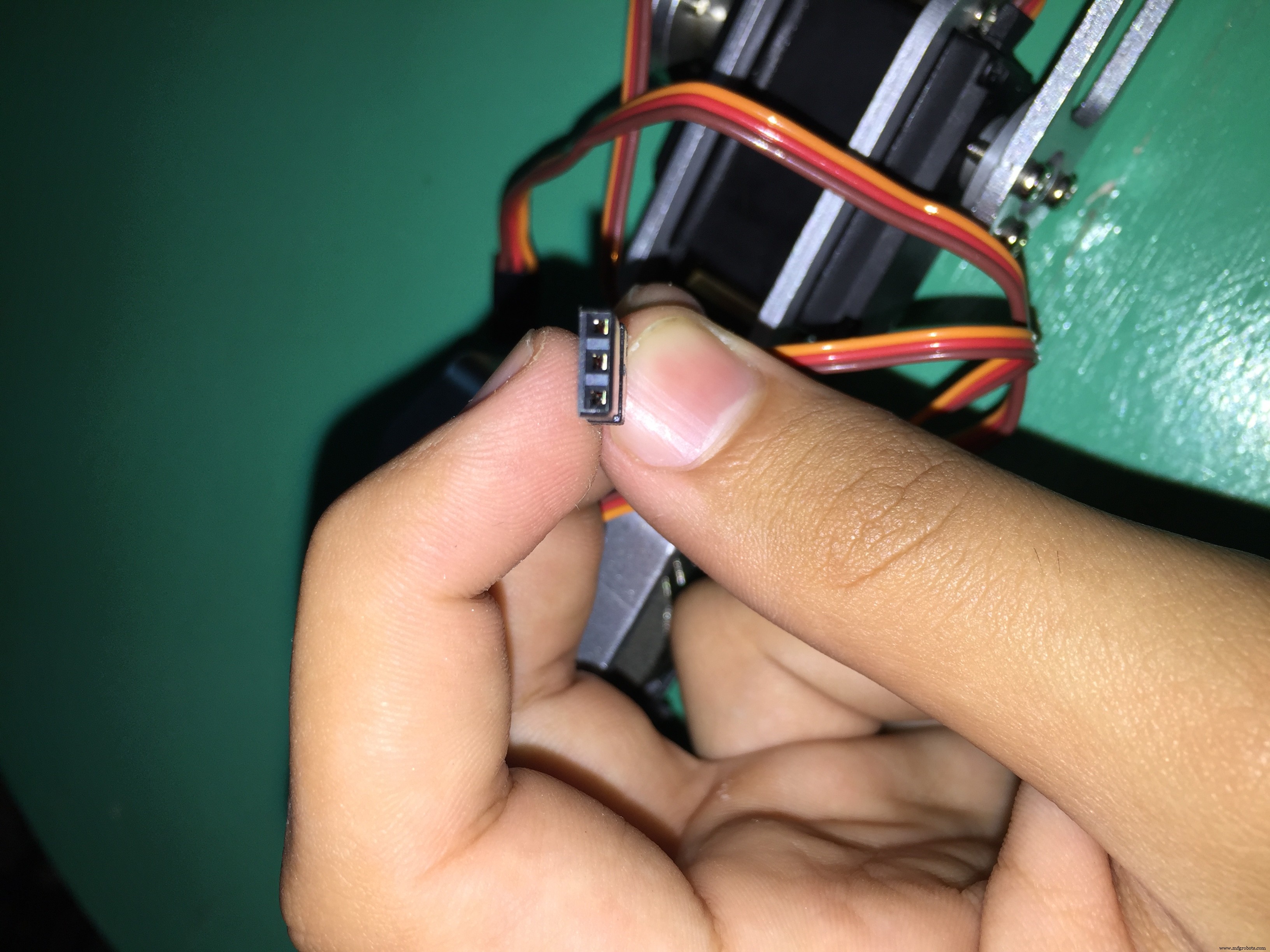
- El cable rojo al positivo de la batería externa
- El cable marrón al negativo de la batería externa
- El cable naranja a cualquier pin digital (PWN) en el Arduino
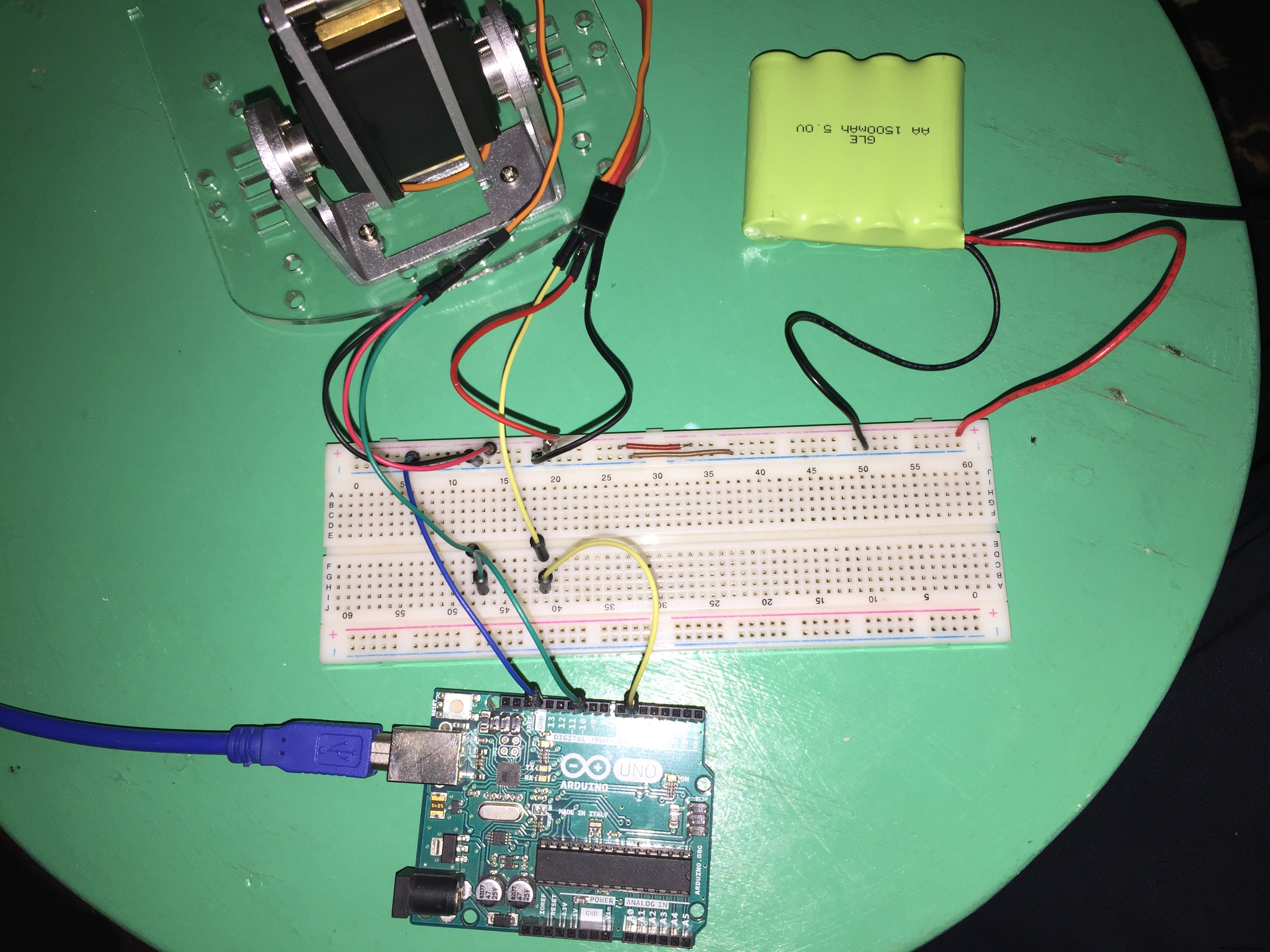
NOTA:No olvides hacer que el GND de la batería y el GND del Arduino sean comunes, hazlo conectando cada GND entre sí.
5) Los motores de CC
Necesita soldar algunos cables en los terminales del motor para poder usar estos motores.
El motor de CC no tiene polaridad. No hay positivo ni negativo. Si invierte las conexiones del motor, la dirección de movimiento del motor cambiará.

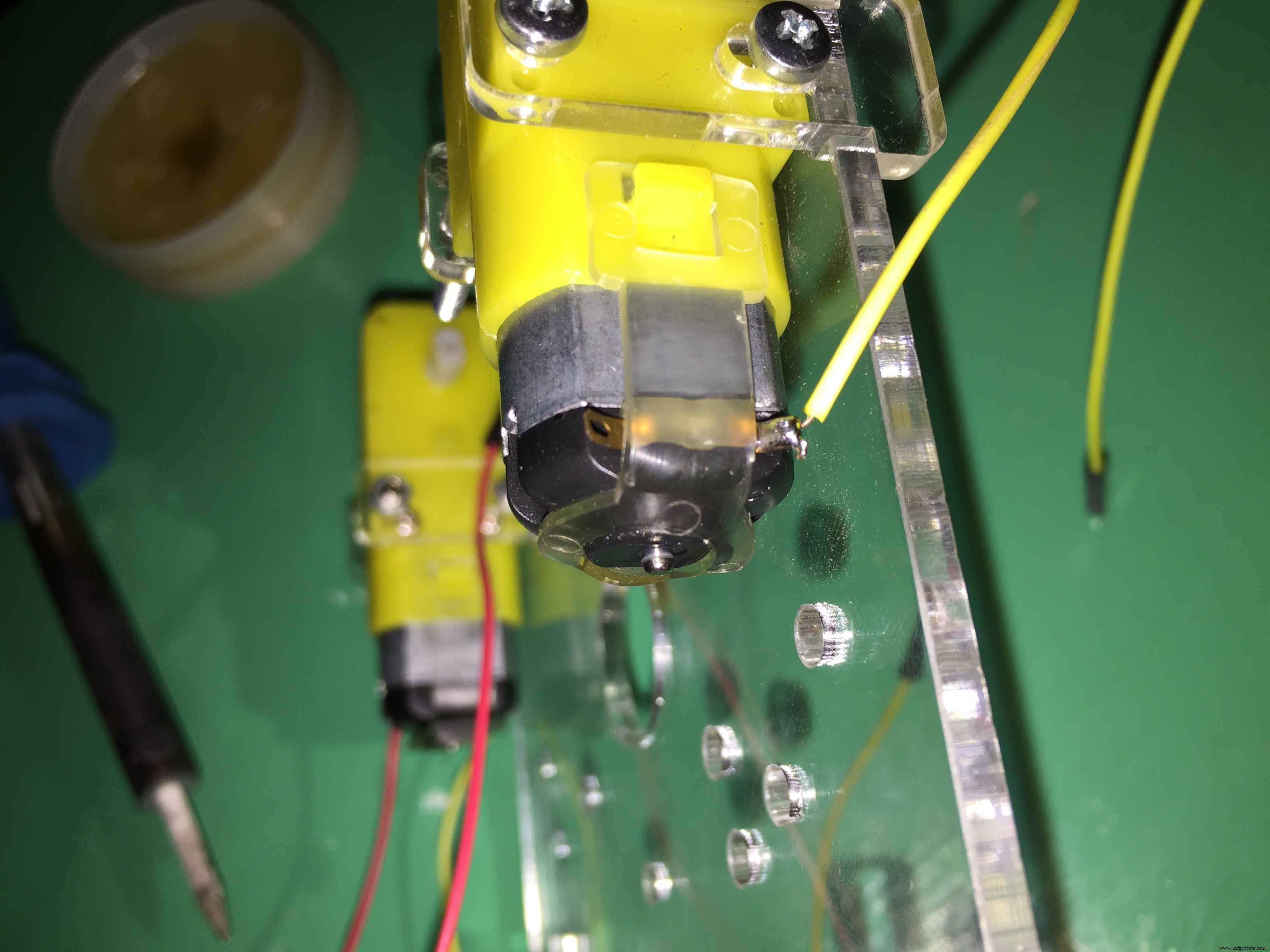
Después de soldar los terminales del motor, conecte estos terminales al protector del motor.

NOTA:en El código Arduino, yo Motor 1 y Motor 2 usados - no Motor 3 ni Motor 4.
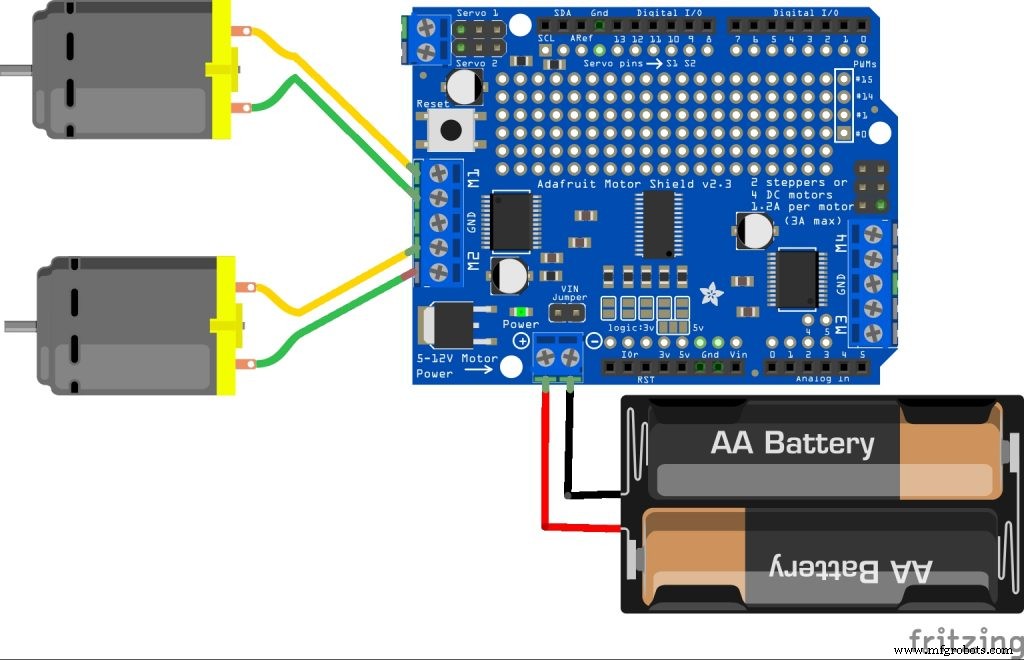
El esquema
Cómo conectar los motores del robot y la batería con el controlador del motor.
Cómo conectar los servomotores Arm y la batería con la placa Arduino.
Cómo conectar el módulo bluetooth con la placa Arduino.
NOTA:desconecte (retire el ALAMBRE ROJO +5 pin) el módulo bluetooth mientras carga el código a la placa Arduino. Luego, vuelva a conectarlo después de que finalice el proceso de carga.
Código
- Elija y coloque el código Arduino del robot
Elija y coloque el código Arduino del robot Arduino
#include#include AF_DCMotor motorR (1); AF_DCMotor motorL (2); Servo elbowServo; Servo gripperServo; comando int; void setup () {gripperServo.attach (9); elbowServo.attach (10); Serial.begin (9600); motorR.setSpeed (255); motorL.setSpeed (255);} bucle vacío () {comando =Serial.read (); / * Código ARM * / if (comando> =1 &&comando <=180) // el servo del codo se mueve de acuerdo con la posición del pulgar en la aplicación mob entre 0 - 180. {ElbowServo.write (comando);} else if ( comando ==205) // La pinza se mueve al ángulo 0 {gripperServo.write (0);} else if (comando ==206) // La pinza se mueve al ángulo 90 {gripperServo.write (90); } else if (comando ==207) // la pinza se mueve al ángulo 180 {gripperServo.write (180);} / * CODIGO DEL COCHE * / else if (comando ==200) {motorR.run (ADELANTE); motorL.run (ADELANTE);} else if (comando ==201) {motorR.run (ADELANTE); motorL.run (HACIA ATRÁS); } else if (comando ==202) {motorR.run (LIBERAR); motorL.run (LIBERAR); } else if (comando ==203) {motorR.run (HACIA ATRÁS); motorL.run (ADELANTE); } else if (comando ==204) {motorR.run (HACIA ATRÁS); motorL.run (HACIA ATRÁS); } else if (comando ==0) {motorR.run (LIBERAR); motorL.run (LIBERAR); }}
Esquemas
Esta aplicación solo se ejecuta en teléfonos Android.Debe encender el Bluetooth antes de usar esta aplicación
antes de elegir el módulo Bluetooth de la aplicación, empareja tu móvil con el módulo Bluetooth de la configuración de tu teléfono ieee_aast_aswan_test1_xVVlPTtt8n.apk
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Cree su robot de transmisión de video controlado por Internet con Arduino y Raspberry Pi
- Robot controlado por Wifi usando Raspberry Pi
- Pinzas de inyección de combustible personalizadas con impresión 3D para un robot Pick and Place
- Seleccionar y colocar fabricantes de robots en India
- Los 10 mejores proveedores de robots Pick and Place
- Piezas de brazo robótico para automatización de selección y colocación
- Cómo funcionan los robots de selección y colocación
- Recoger y colocar:un ejemplo perfecto del uso de robots con EasyWork
- Robots y fabricación de baterías:una conexión positiva
- Herramientas de extremo de brazo:aplicaciones de selección y colocación de robots