


Biblioteca de control de motores de CC
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Aquí les presento la librería Arduino para controlar el motor DC. La biblioteca tiene tantas instalaciones y flexibilidad que puede controlar cualquier motor de CC de la manera requerida. La biblioteca está diseñada según el control industrialmotion requisitos. La biblioteca tiene 16 funcionalidades diferentes, de modo que puede controlar el motor de la manera más versátil. Aquí está la lista de instalaciones en la biblioteca
1. Controla la dirección de rotación del motor
2. Controla la velocidad del motor de 0 a 100%
3. Puede proporcionar arranque suave al motor en el tiempo especificado - significa que la velocidad del motor aumentará del 0% al nivel deseado en el tiempo especificado
4. Puede proporcionar parada suave al motor en el tiempo especificado - significa que la velocidad del motor disminuirá de la velocidad actual al 0% en el tiempo especificado
5. Puede aplicar control de avance al motor en cualquier dirección - significa que el motor se sacudirá en la dirección especificada
6. Puede aplicar DC BREAK (significa PARADA inmediata o de emergencia) al motor
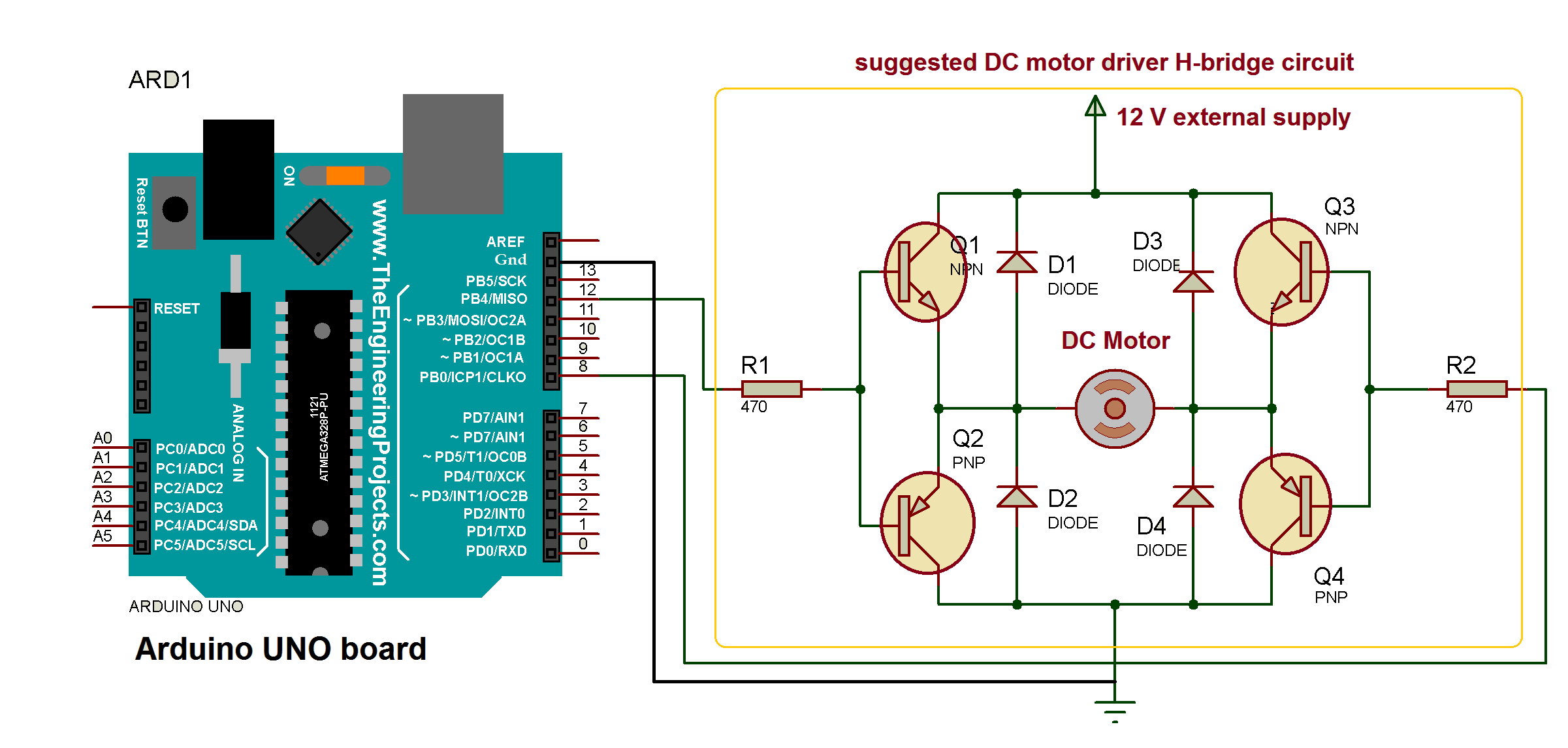
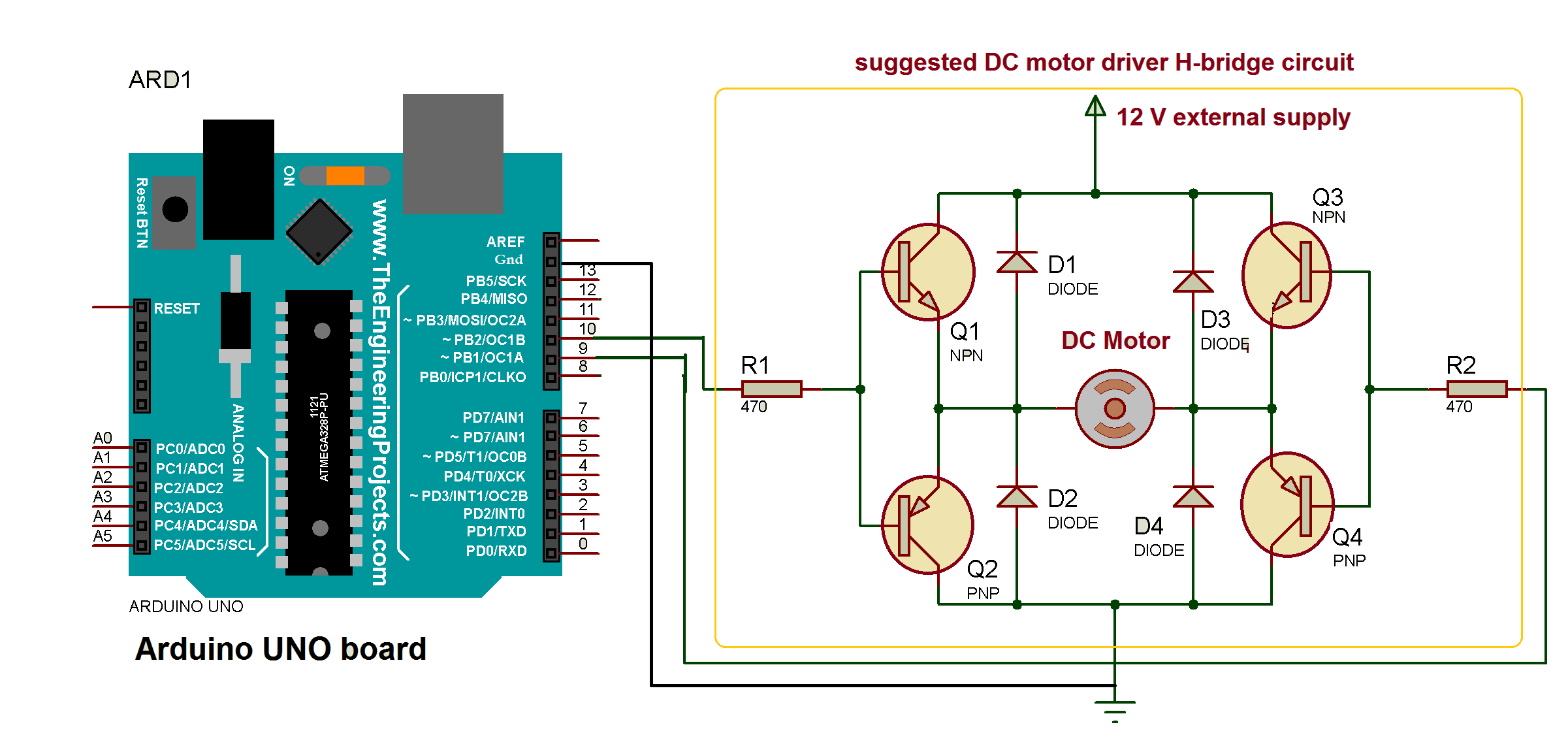
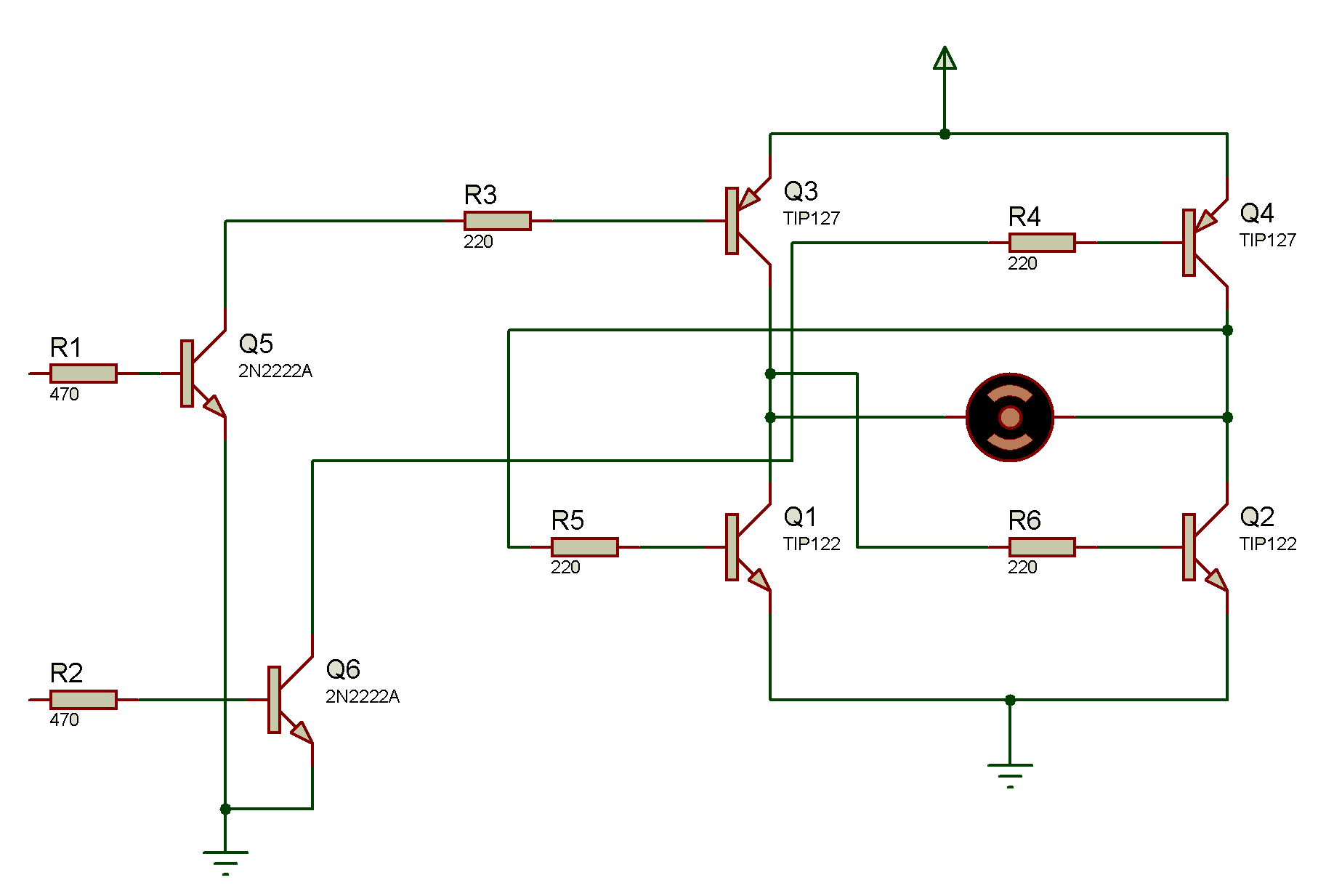
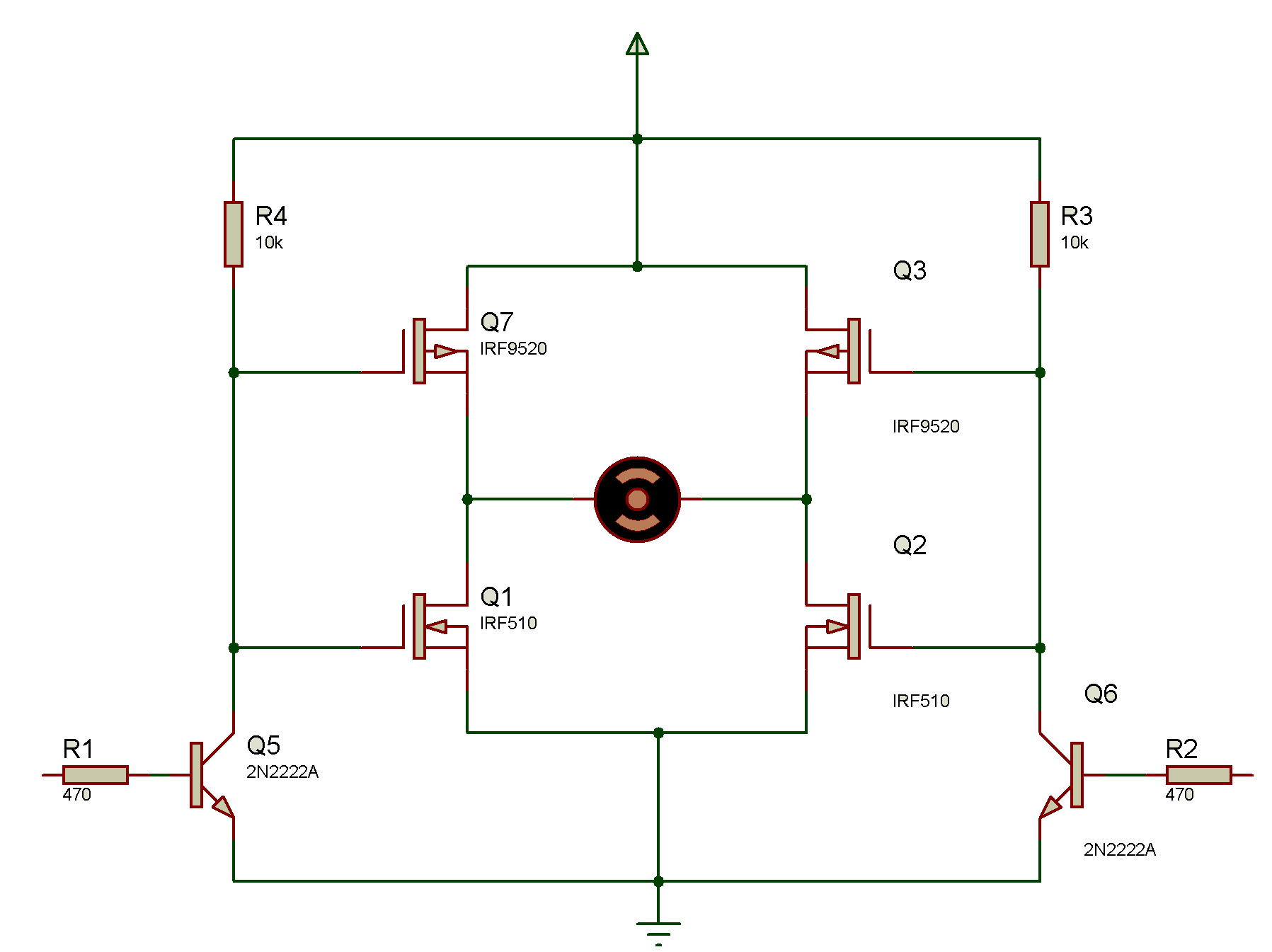
Aquí se ofrecen breves descripciones de todas las funciones de la biblioteca. A continuación se dan algunos ejemplos que explican cómo se controla el motor utilizando esta biblioteca. Hay tres videos que muestran la demostración de estos ejemplos. Por último, se sugiere que el circuito use un circuito H-Bridge que se usa ampliamente para controlar motores de CC.
Para usar esta biblioteca en su boceto de arduino, simplemente copie el DC_Motor carpeta en el directorio raíz de la carpeta de la biblioteca arduino como C:\ arduino-1.6.7 \ libraries
Descripción de las funciones de la biblioteca:
1. DC_Motor (int pin1, int pin2): esta función declara los pines arduino que accionan el motor de CC
2. DC_Motor (int pin1, int pin2, int speed_flag): esta función declara pines de salida analógica de arduino que impulsa el motor de CC
3. start_motor (int dir): esta función comienza a girar el motor en la dirección especificada. Si la dirección es 1, el motor comenzará a girar hacia adelante y viceversa
4. adelante (): esta función iniciará la rotación del motor en dirección de avance
5. reverso (): esta función iniciará la rotación del motor en dirección inversa
6. dc_break (): esta función detendrá instantáneamente la rotación del motor *
7. stop_motor (): esta función dejará de girar el motor
8. jogg_full_speed (int dir): esta función aplicará tirón al motor durante 5 segundos a máxima velocidad en la dirección requerida
* Nota:- esta función solo funcionará si el motor de CC tiene arreglos internos para tal ruptura de CC. Además, el circuito del controlador de motor adecuado debe diseñarse con resistencias de frenado dinámico (DBR) y debe tenerse un cuidado completo para que el motor o el circuito no se dañen.
Todas las funciones anteriores proporcionan un control simple del motor de CC. No controlan la velocidad del motor. Las siguientes 8 funciones controlan la velocidad y la dirección del motor. Pero es necesario seleccionar pines de salida analógica de arduino para usar estas funciones. El motor de CC debe inicializarse con la segunda función junto con el indicador de velocidad establecido en 1
9. set_speed (velocidad int): esta función establecerá la velocidad del motor de CC entre 0 y 100%
10. forward_with_set_speed (): esta función comenzará a girar el motor de CC hacia adelante a la velocidad establecida
11. reverse_with_set_speed (): esta función comenzará a girar el motor de CC en reversa a la velocidad establecida
12. run_motor (int dir, int speed): esta función hará girar el motor de CC en cualquier dirección a la velocidad establecida
13. jogg_set_speed (int dir, int speed): esta función aplicará tirón al motor en cualquier dirección a la velocidad establecida
14. motor_speed_zero () *: la función reducirá la velocidad del motor a 0 - significa detener el motor
15. soft_start (int dir, int speed, inttime_in_sec): esta función aumentará la velocidad del motor de 0 al nivel deseado en un tiempo especificado en cualquier dirección. El tiempo tiene que seleccionarse en segundos
16. smooth_stop (int time_in_sec): esta función reducirá la velocidad del motor de la velocidad de funcionamiento actual a 0 en el tiempo especificado. El tiempo tiene que seleccionarse en segundos
* Nota:no se puede usar la función stop_motor () aquí porque proporciona una salida digital, mientras que esta función proporciona una salida analógica mínima para hacer que la velocidad del motor de CC sea cero. Cuando controle el motor de CC con velocidad, no solo detenga el motor, sino que haga que su velocidad sea cero.
Ejemplos:
1) Gire el motor de CC hacia adelante y hacia atrás a máxima velocidad (control de velocidad máxima)
/ * este programa hará girar el motor de CC hacia adelante durante 5 segundos
luego deténgase durante 2 segundos y vuelva a girar el motor hacia atrás durante
5 segundos, deténgase durante 2 segundos seguidos
creado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
el 10/12/2016
* /
#include
DC_Motormotor (8, 12);
voidsetup ()
{
}
bucle vacío ()
{
motor.forward ();
retraso (5000);
motor.stop_motor ();
retraso (2000);
motor.reverse ();
retraso (5000);
motor.stop_motor ();
retraso (2000);
}
2) Gire el motor de CC hacia adelante y hacia atrás a la velocidad establecida (con control de velocidad)
/ * este programa hará girar el motor de CC hacia adelante durante 5 segundos
al 40% de velocidad, luego deténgase durante 2 segundos y vuelva a girar el motor hacia atrás durante
5 segundos al 80% de velocidad de forma continua
creado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
el 10/12/2016
* /
#include
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
bucle vacío ()
{
motor2.set_speed (40);
motor2.forward_with_set_speed ();
retraso (5000);
motor2.motor_speed_zero ();
retraso (2000);
motor2.set_speed (80);
motor2.reverse_with_set_speed ();
retraso (5000);
motor2.motor_speed_zero ();
retraso (2000);
}
3) Aplicar jog al motor en ambas direcciones con y sin control de velocidad
/ * este programa aplica jog a dos motores DC diferentes
* aplica jog al primer motor a máxima velocidad en ambas direcciones
* y luego proporciona jog al segundo motor con 80% de velocidad en reversa
* dirección y 30% de velocidad en dirección de avance
* creado por Ashutosh M Bhatt (+ 91-9998476150), Gujarat (INDIA)
* el 22/10/2016
* /
#include
Motor DC_Motor (8, 12);
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
voidloop ()
{
motor.jogg_full_speed (1);
motor.jogg_full_speed (0);
motor2.jogg_set_speed (0, 80);
motor2.jogg_set_speed (1, 30);
}
4) Aplique un arranque suave y una parada suave al motor
/ * este programa dará un arranque suave al motor y aumentará su velocidad
de 0 a 90% en 10 segundos en dirección de avance
luego da una parada suave del 90% a 0 en 5 segundos
de nuevo arranque suave de 0 a 50% en 6 segundos en dirección inversa
y finalmente parada suave del 50% a 0 en 3 segundos
creado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
el 10/12/2016
* /
#include
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
voidloop ()
{
motor2.soft_start (1, 90, 10);
retraso (3000);
motor2.smooth_stop (5);
motor2.soft_start (0, 50, 6);
retraso (3000);
motor2.smooth_stop (3);
}
Código
- Biblioteca de control de motores de CC
Biblioteca de control de motores de CC Archivo de encabezado C
Esta biblioteca controla la velocidad y la dirección de todos los tipos de motores de CC.Sin vista previa (solo descarga).
Esquemas
Controlador de puente Arduino UNO y H utilizado para controlar el motor de CC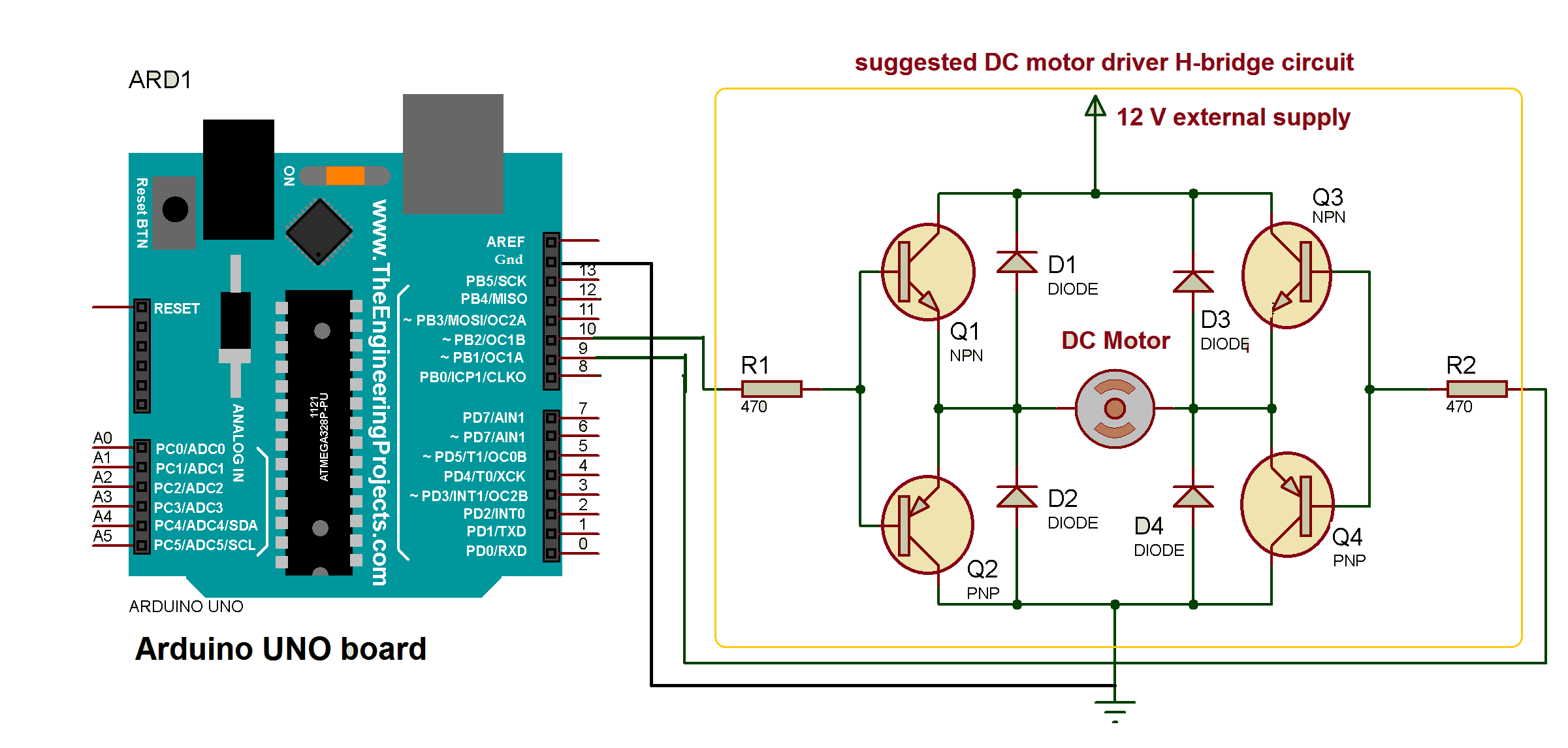
Proceso de manufactura
- Control de un efecto con sensores reales
- Haga una máquina de escribir para hacer tareas caseras en casa
- Sistema de robótica de detección humana con Arduino Uno
- Biblioteca de motores paso a paso bipolares
- Juguete controlado por Android con Raspberry Motor Shield
- Obstáculos que evitan el robot con servomotor
- Robot seguidor de línea
- Controlar un robot Roomba con Arduino y un dispositivo Android
- Control del servomotor con Arduino y MPU6050
- Control del brillo del LED usando Bolt y Arduino
- Robot para navegación interior supercogedora