
Paso 1.
Construya el robotcar usando cualquier plataforma disponible construida en un circuito de dos ruedas. El diagrama de conexión de los componentes electrónicos se muestra en la siguiente figura. Necesitará Arduino UNO o placa compatible, módulo Bluetooth HC-05 (06), controlador de motor y batería de la fuente de alimentación. Los motores de engranajes se colocan en la plataforma y se fuerzan a mover las ruedas del robot. 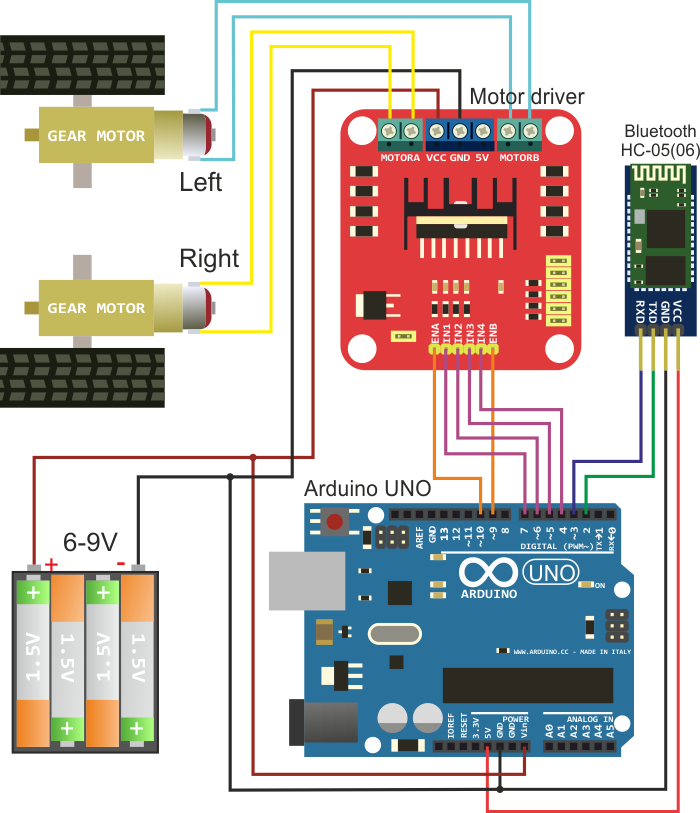
Paso 2.
Vaya al sitio web del servicio RemoteXY en http://remotexy.com/en/editor/ y cree una interfaz gráfica de usuario para controlar el robot. Configure una función de control utilizando el sensor G para joystick. Un ejemplo de interfaz se encuentra en la figura siguiente. Haga clic en el botón "Obtener código fuente". 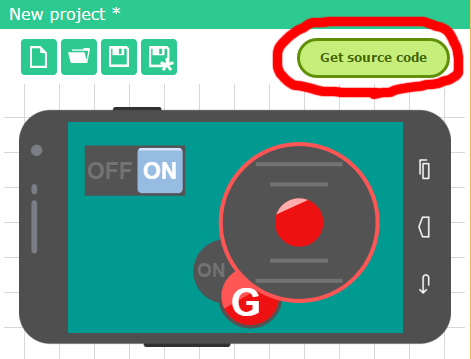
Paso 3.
Descargue el código fuente de la GUI y ábralo en Arduino IDE. Para la compilación necesita la biblioteca RemoteXY.h; la biblioteca se puede descargar desde el enlace http://remotexy.com/en/library/. Ya puede intentar cargar el código en Arduino y conectarse con la aplicación móvil. Pero si bien este es solo el código en blanco, deberá agregar la funcionalidad requerida que vincule una interfaz gráfica y un controlador de motor.
Paso 4.
Luego, debe agregar la funcionalidad de control de robot al código fuente mediante una interfaz gráfica. Para este propósito, el campo Estructura RemoteXY. La estructura RemoteXY muestra todos sus controles GUI.
El código fuente resultante se muestra a continuación. Puede compilarlo y cargarlo en Arduino.
Paso 5.
Instale la aplicación móvil RemoteXY en http://remotexy.com/en/download/. Cuando la aplicación se esté ejecutando en un dispositivo móvil, presione el botón de conexión Bluetooth en la lista, seleccione el nombre de su módulo Bluetooth, para los módulos HC-05 (06) el nombre normalmente será INVOR o HC-06.
¡Funciona!
Código - Coche robot de control remoto a través de la aplicación móvil RemoteXY
Coche robot de control remoto a través de la aplicación móvil RemoteXY C / C ++ Puede descargar la biblioteca RemoteXY.h mediante el enlace http://remotexy.com/en/library//////////////////////////// ////////////////////// // Biblioteca de inclusión RemoteXY // ///////////////////////// ////////////////////// / * RemoteXY selecciona el modo de conexión e incluye biblioteca * / #define REMOTEXY_MODE__SOFTWARESERIAL #include #include / * Configuración de conexión RemoteXY * / #define REMOTEXY_SERIAL_RX 2 #define REMOTEXY_SERIAL_TX 3 #define REMOTEXY_SERIAL_SPEED 9600 / * RemoteXY configurate * / unsigned char RemoteXY_CONF [] ={3,0,23,0,1,5,5,15,41, 11, 43,43,1,2,0,6,5,27,11,5, 79,78,0,79,70,70,0}; / * esta estructura define todas las variables de su interfaz de control * / struct {/ * variable de entrada * / firmado char joystick_1_x; / * =-100..100 posición de la palanca de mando de la coordenada x * / carácter firmado joystick_1_y; / * =-100..100 posición de la palanca de mando de la coordenada y * / unsigned char switch_1; / * =1 si se enciende y =0 si se apaga * / / * otra variable * / unsigned char connect_flag; / * =1 si está conectado por cable, de lo contrario =0 * /} RemoteXY; ///////////////////////////////////////////// // END RemoteXY include // /////////////////////////////////////////////// / * definido los pines de control del motor derecho * / #define PIN_MOTOR_RIGHT_UP 7 #define PIN_MOTOR_RIGHT_DN 6 #define PIN_MOTOR_RIGHT_SPEED 10 / * definió los pines de control del motor izquierdo * / #define PIN_MOTOR_LEFT_UP 5 #define PIN_MOTOR_LEED_UP 5 #define PIN_MOTOR_LEED_LEED_4 define PIN_LED 13 / * definió dos matrices con una lista de pines para cada motor * / carácter sin firmar RightMotor [3] ={PIN_MOTOR_RIGHT_UP, PIN_MOTOR_RIGHT_DN, PIN_MOTOR_RIGHT_SPEED}; Carácter no firmado LeftMotor [3] ={PIN_MOTOR_LEFT_UP, PIN_MOTOR_LEFT_DN, PIN_MOTOR_LEFT_SPEED}; / * control de velocidad del motor motor - puntero a una serie de pines v - la velocidad del motor se puede configurar de -100 a 100 * / void Wheel (unsigned char * motor, int v) {if (v> 100) v =100; si (v <-100) v =-100; if (v> 0) {digitalWrite (motor [0], HIGH); digitalWrite (motor [1], BAJO); analogWrite (motor [2], v * 2.55); } else if (v <0) {digitalWrite (motor [0], LOW); digitalWrite (motor [1], ALTO); analogWrite (motor [2], (-v) * 2.55); } else {digitalWrite (motor [0], LOW); digitalWrite (motor [1], BAJO); analogWrite (motor [2], 0); }} void setup () {/ * pines de inicialización * / pinMode (PIN_MOTOR_RIGHT_UP, OUTPUT); pinMode (PIN_MOTOR_RIGHT_DN, SALIDA); pinMode (PIN_MOTOR_LEFT_UP, SALIDA); pinMode (PIN_MOTOR_LEFT_DN, SALIDA); pinMode (PIN_LED, SALIDA); / * módulo de inicialización RemoteXY * / RemoteXY_Init (); } void loop () {/ * módulo controlador de eventos RemoteXY * / RemoteXY_Handler (); / * administrar el pin LED * / digitalWrite (PIN_LED, (RemoteXY.switch_1 ==0)? LOW:HIGH); / * administrar el motor correcto * / Wheel (RightMotor, RemoteXY.joystick_1_y - RemoteXY.joystick_1_x); / * administrar el motor izquierdo * / Wheel (LeftMotor, RemoteXY.joystick_1_y + RemoteXY.joystick_1_x); } Esquemas 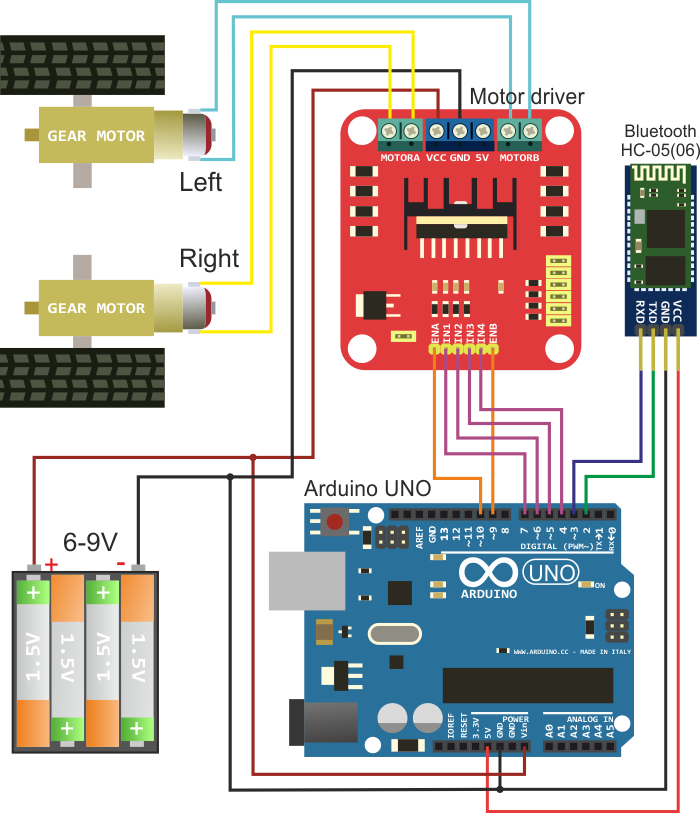
|



