


Arduino Trash-Bot (Auto-abrir / cerrar papelera)
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Todo se está volviendo más inteligente, ¿verdad? Entonces, ¿por qué no tu cubo de basura? Este cubo de basura abre y cierra su tapa si ve basura frente a él. Solo tiene que llevarle la basura y se abrirá automáticamente y esperará a que lo alimente más, luego, después de un cierto retraso, se cerrará automáticamente. Mire el video para ver exactamente lo que puede hacer.
Empecemos.
Paso 1:componentes



(2 imágenes más)
- Arduino Uno (cualquier placa)
- Servomotor (estoy usando micro servo sg90)
- Sensor de ultrasonido HCSR04
- Brazos de servo (al lado del servo en la imagen 2)
- Cartón (solo corte una pieza)
- Papelera
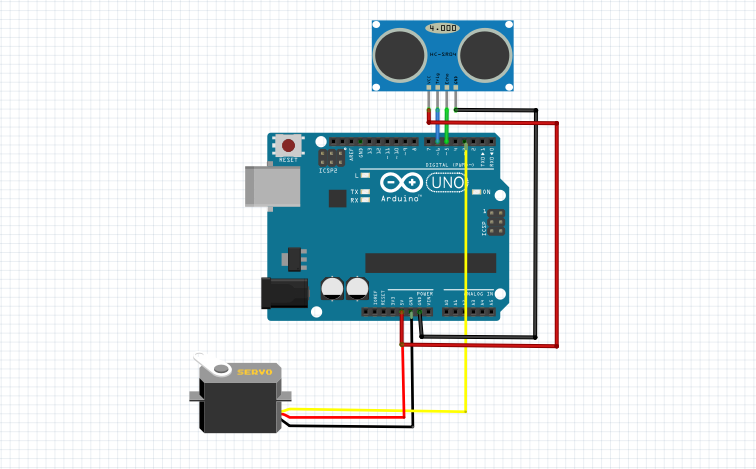
Paso 2:construye el circuito
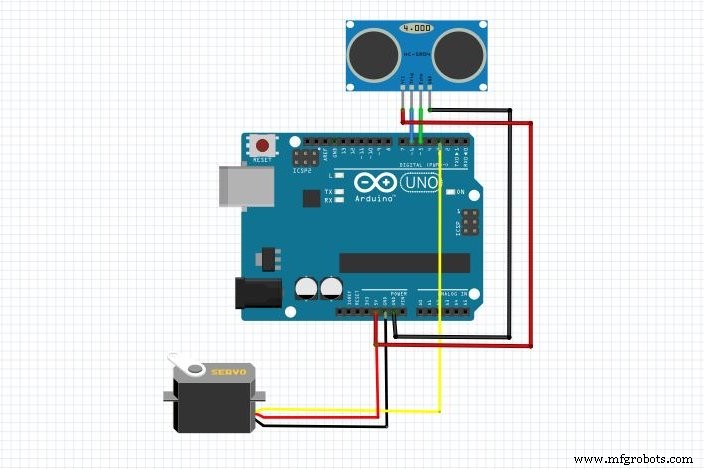
El circuito es tan fácil. Como el servo y el sonar solo consumen menos energía, puede alimentarlos directamente desde la fuente Arduino 5v. Solo recuerde alimentar el Arduino con más de 7.4 V CC o al menos 7v.
- Datos del servo (amarillo) al pin 3 de arduino
- Servo vcc (rojo) a 5v de Arduino
- Servo tierra (negro / gris) a Arduino Gnd
- Activación del sensor de sonda para Arduino 6
- Eco del sensor de sonda a Arduino 5
- Vcc a Arduino 5v
- Gnd a Arduino Gnd
Paso 3:conecte el brazo servo



Simplemente tome este brazo servo y conéctelo a una pieza larga de cartón con pegamento caliente u otros pegamentos. También puede utilizar palitos de helado en lugar de cartón. Luego, conecte el brazo largo del servo al servomotor.
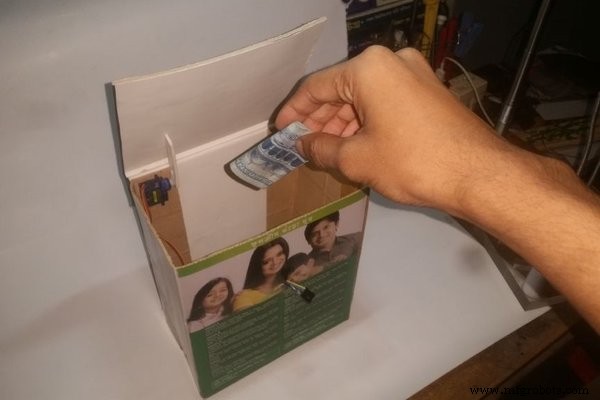
Paso 4:agregue el sensor de servo y sonda a la papelera



Conecte el sensor de la sonda mirando hacia arriba al contenedor de esta manera. Y luego agregue el servomotor como este en las imágenes 2 y 3, para que el servo pueda girar hacia arriba.
Paso 5:el código
Enlace de código:https://github.com/ashraf-minhaj/Trash-bot
He programado el Arduino para que si ve alguna basura (literalmente cualquier cosa) en un rango de 50 cm, el servo vaya a 50 grados y golpee la tapa superior del contenedor, de modo que la tapa superior se abra, espere tres segundos, luego gira automáticamente a 160 grados y así se cierra la tapa superior. Así que ahora verá un bot de basura de apertura / cierre automático.
#include Servo servo; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, ENTRADA); servo.attach (3);} void loop () {int duración, distancia; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Mide la entrada de pulso en echo pinduration =pulseIn (echoPin, HIGH); // La distancia es la mitad de la duración dividida por 29.1 (de la hoja de datos) distancia =(duración / 2) / 29.1; // si la distancia es menor a 0.5 metros y mayor que 0 (0 o menos significa sobre rango) if (distancia <=50 &&distancia> =0) {servo.write (50); delay (3000);} else {servo.write (160);}
Paso 6:Listo

Así que ahora solo enciende el Arduino con más de 7v y tienes un robot de basura.
Gracias.
[Si te gusta mi trabajo, apóyame suscribiéndome a mi canal de YouTube]
Código
- código de bot de basura de arduino
código de bot de basura arduino C / C ++
#includeServo servo; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, ENTRADA); servo.attach (3);} void loop () {int duración, distancia; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Mide la entrada de pulso en echo pinduration =pulseIn (echoPin, HIGH); // La distancia es la mitad de la duración dividida por 29.1 (de la hoja de datos) distancia =(duración / 2) / 29.1; // si la distancia es menor a 0.5 metros y mayor que 0 (0 o menos significa sobre rango) if (distancia <=50 &&distancia> =0) {servo.write (50); delay (3000);} else {servo.write (160);} // Esperar 60 ms no hará daño a nadiedelay (60);}
Esquemas
código de bot de basura de arduino
https://github.com/ashraf-minhaj/Trash-botProceso de manufactura