


Robot quitanieves
Componentes y suministros
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Acerca de este proyecto
¿Por qué quería hacer un robot quitanieves? Dado que no soy insensible a las soluciones para hacer la vida más fácil, consideré la idea de crear y proponer una solución que pudiera ayudar a las personas a evitar el frío invernal y la fatiga de usar la pala manual tradicional para quitar la nieve de la pasarela. Para hacer esto, opté por algo divertido y tecnológico, de esta manera decidí comenzar a desarrollar un Robot Quitanieves, controlado a distancia, con mecánica sólida, electrónica de control y potentes motores eléctricos. El resultado es una versión en miniatura de un quitanieves real con orugas, cuchilla motorizada (que se puede levantar y mover) y un proyector de luz montado en la parte superior para iluminar el camino en la oscuridad. El robot se puede controlar de forma remota con el mando a distancia de PlayStation.
En el siguiente video se puede ver al robot quitanieves en acción, alguien me dijo que parece que para palear el robot quitanieves debe tomar la carrera, NO ES ASÍ , Hice el video para mostrar cómo se quita la nieve.
¿Cómo se hace?
El robot está compuesto por un bastidor que soporta una cuchilla motorizada (que se puede levantar y mover) y el sistema de tracción compuesto por motores eléctricos, ruedas y orugas. El chasis está realizado con barras de hierro de sección rectangular soldadas entre sí. El tamaño del robot es de 600X375X240 mm, excluida la hoja, y su peso es de unos 30 kg.
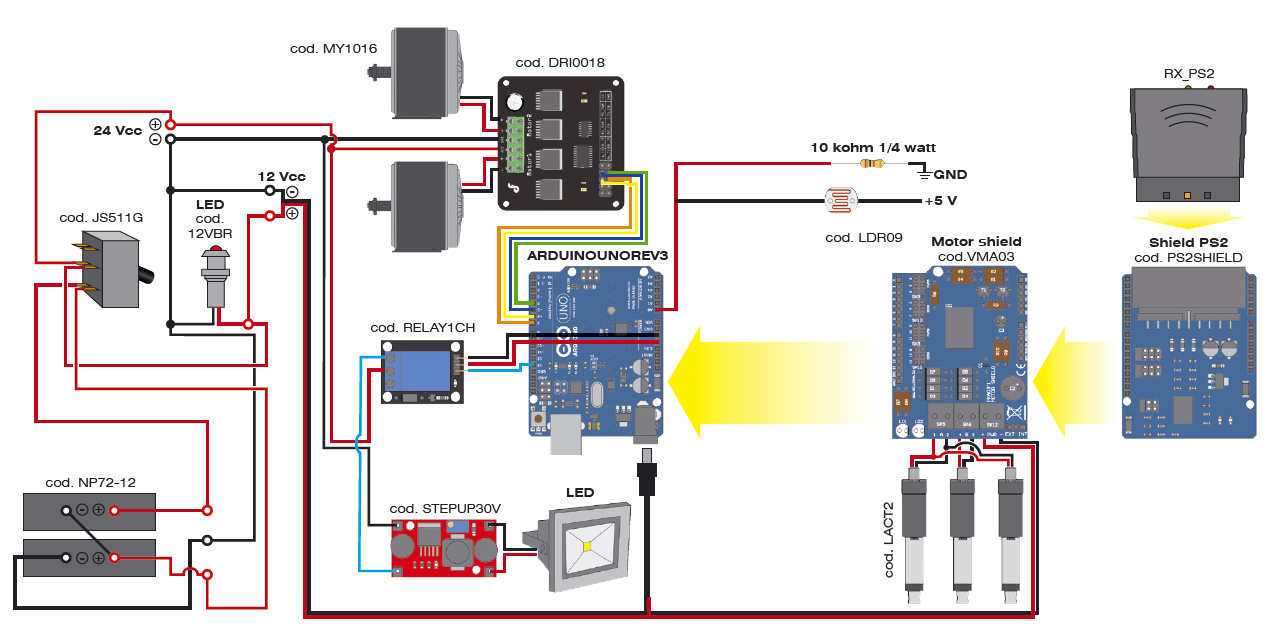

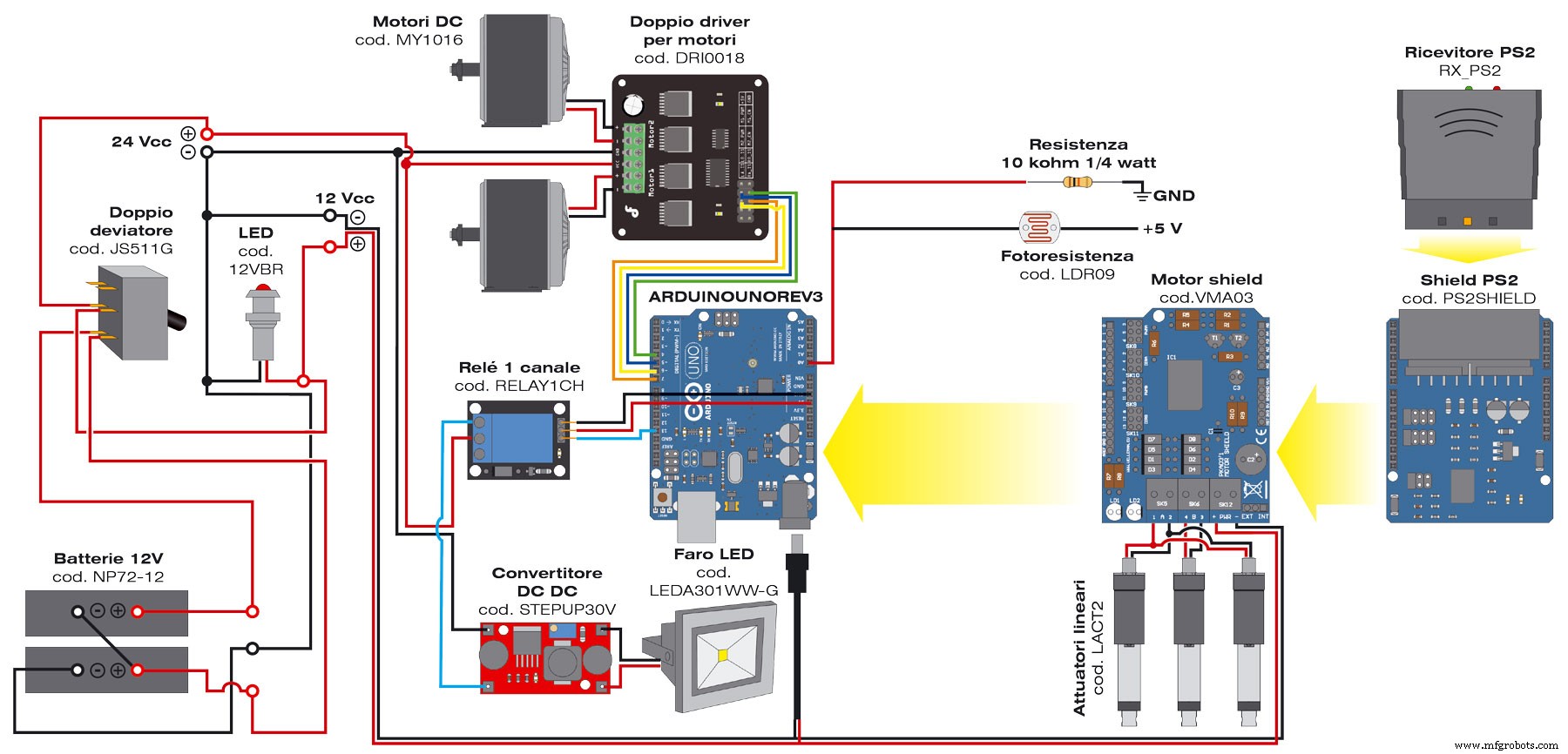
La parte eléctrica y electrónica de la quitanieves se basa en Arduino Uno, aloja tres escudos e interactúa con:
- CONDUCTOR DE MOTOR
- CANAL DE TABLERO DE RELÉS
- Mejora del convertidor CC / CC
El escudo montado en Arduino es el escudo del motor para controlar los tres motores lineales que gestionan el movimiento de la cuchilla y el PS2SHIELD, que le permite interactuar con la PlayStation 2 (PS2); este último requiere el RX-PS2, que es un receptor de radio de 2.4 GHz para enviar / recibir comandos específicos desde la consola mencionada anteriormente. El diagrama de cableado del robot es lo que encontrará en estas páginas; la fuente de alimentación está formada por una serie de dos baterías de gel de plomo de 7,2 Ah:tomamos los 12 V del punto medio de conexión de las dos, mientras que entre el negativo y el positivo de la serie tomamos 24 voltios. Un interruptor (125 V, 2 × 15 amperios) controla las dos líneas de suministro. Con 12 voltios, ejecutamos Arduino, que alimentará los escudos a través de su pin-strip; un LED (que monta internamente la resistencia limitadora) indicará cuando Arduino se está ejecutando.
Los 12 voltios directamente de la pila de baterías también alimentan la sección de potencia del protector del motor. De hecho, dado que la absorción de los tres actuadores lineales (cod. LACT2) es alta, no es recomendable tomar los 12 V de Arduino:se opta por que la fuente de alimentación externa se suministre al terminal PWR correspondiente. Para utilizar la fuente de alimentación externa, debes mover el jumper (en el blindaje) cerca del terminal, entre el central y el EXT. La gestión del escudo requiere una biblioteca especial para Arduino, suministrada con el componente. Cada actuador lineal está compuesto por un motorreductor de 12 Vcc que utiliza un tornillo sin fin para mover un eje hacia adelante y hacia atrás a lo largo de su longitud (excursión máxima de 5 cm).
El actuador tiene una carga dinámica de 50 kg y una velocidad máxima de 1,3 cm / s. Es capaz de soportar hasta unos 250 kg, cuando no se mueve, y el par asegura el mantenimiento de la posición del eje incluso en ausencia de potencia. Dos interruptores de límite permiten que el motor se detenga cuando alcanza la máxima extensión y contracción, mientras que los diodos permiten la dirección inversa después de alcanzar el punto límite. El actuador está hecho de metal y está sellado para protegerlo del polvo y el agua (clasificación IP63).
Pasemos ahora a la línea de alimentación de 24 voltios, que alimenta la parte de potencia del quitanieves, que son las secciones de tracción y proyector (opcional):la primera está basada en el driver del motor, para ser conectado con cuatro cables al mismo número de líneas digitales Arduino. El controlador del motor es un controlador de potencia de doble puente capaz de impulsar dos motores cepillados de forma continua con un voltaje máximo de 35 VCC y una corriente de 15 A (cada uno).
Al interactuar con Arduino y usar solo cuatro E / S digitales (2 PWM), puede elegir la dirección de rotación y la velocidad de los motores. El circuito cuenta con cuatro pines de control, cuatro leds que indican el sentido de rotación de los motores, dos pines para la fuente de alimentación de la placa (5 Vdc) y dos disipadores de calor de aluminio ubicados en la parte trasera del circuito impreso, necesarios para disipar el calor generado durante el funcionamiento. a plena potencia.
Para la gestión del controlador por Arduino, el fabricante proporciona una biblioteca especial. Los bornes de salida permiten conectar los dos motores, que se conectarán como indica el diagrama (¡no invierta la polaridad, de lo contrario las pistas irán al revés!) Mediante cables con una sección de al menos 1,5 mm2. Sobre las entradas de control, se debe respetar la conexión entre Arduino y el conector del controlador paso 2.54; correspondencia necesaria cuando se utiliza la biblioteca proporcionada por el fabricante y nuestro firmware:si los edita, debe revisar las conexiones.
Recuerde que DIR son los niveles lógicos para establecer la dirección de rotación de los motores y PWM son las señales PWM para controlar los controladores de potencia. Para identificar los contactos del conector del controlador, es suficiente consultar la serigrafía visible junto a él en el lado del componente de la placa de circuito. Además del controlador del motor, los 24 voltios alimentarán la sección del proyector LED, se puede montar o no; si está montado, se indica cableado respetado y recuerde tomar el positivo 24 V de la tarjeta de relés (cod. RELAY1CH). Este último alberga un relé y el respectivo transistor de accionamiento controlado por Arduino a través del Digital I / O 13; Arduino también alimenta la tarjeta, por medio de + 5V y tierra (GND).
Un relé permite encender y apagar el proyector, focalizando la acción en el circuito correspondiente. El proyector está diseñado para funcionar a 220 Vac, sin embargo, dado que este voltaje no está disponible en el robot, para evitar el uso de un inversor modificamos el proyector abriéndolo, quitando el AC / DC y llevando directamente los dos cables del LED de encendido. a la salida del convertidor DC / DC (cod. STEPUP30V); este último es un convertidor de conmutación con voltaje de salida ajustable, que debe sintonizarse para proporcionar al LED una corriente que lo haga funcionar a unos 10 vatios. Por lo general, esto se logra a aproximadamente 30 voltios. Sin embargo, recuerde que la potencia viene dada por el producto VxI, (se obtiene corriente por voltaje, en vatios si V está en voltios y I en amperios), luego a 30 V, el consumo de corriente debe ser un poco menos de 340 mA. Aunque el grupo de LED está protegido internamente contra sobrecorriente, el STEPUP30V tiene una limitación de la corriente de salida a 2A por lo que puede ser útil reemplazarlo con un DC / DC equipado con límite de corriente de salida.
La recepción de datos desde el mando a distancia es el trabajo que realiza el shield PS2SHIELD, para lo cual el fabricante pone a disposición la librería específica. El escudo realiza la recepción y decodificación del comando; la parte de radio se deja al RX _PS2, que se inserta en el conector correspondiente. Lo último a destacar es la fotorresistencia, utilizada por Arduino para detectar la iluminación ambiental y controlar la placa RELAY1CH para que el proyector LED se encienda; el componente se alimenta al divisor de voltaje mediante una resistencia de 10 kOhm (1/4 W) y se lee desde la entrada analógica A0 Arduino. Los 5 voltios se toman de Arduino 5V. Este sensor de luz hace una cosa simple:en buenas condiciones de iluminación, la resistencia del fotorresistor es baja y el voltaje leído por el ADC del microcontrolador Arduino es bajo y no dispara la placa de relés; en cambio, la oscuridad aumenta mucho la resistencia y el ADC lee un voltaje cercano a los 5 voltios, lo que hace que el proyector se encienda.
INSTRUCCIONES DE CONSTRUCCIÓN
GUÍA RÁPIDA
Código
- Bosquejo
Dibuja Arduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Esquemas
Proceso de manufactura