


Swiper - Auto Tinder / Bumble Swiper
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Historia de fondo
Mis amigos me hicieron un Tinder y, como la mayoría de las personas en la aplicación, rápidamente me decepcionó lo monótono que era. Entonces me di cuenta de que era un ingeniero mucho mejor que un compañero potencial, así que armé esto con un motor paso a paso barato que tenía por ahí. ¡Así que ahora también puede obtener más de 800 golpes por hora con esto en Bumble o Tinder!
Descripción general rápida:
Hay tres pasos rápidos para esta construcción:imprimir las piezas, cablear + probar el motor paso a paso y armar todo.
Paso 1:Impresión de las piezas
Consulte https://www.thingiverse.com/thing:2849598 para ver los archivos imprimibles en 3D. Lo principal a tener en cuenta sobre estos archivos es que utilicé un 50% de relleno para crear la base, esto es para pesar la base para que no se mueva mientras se desliza.
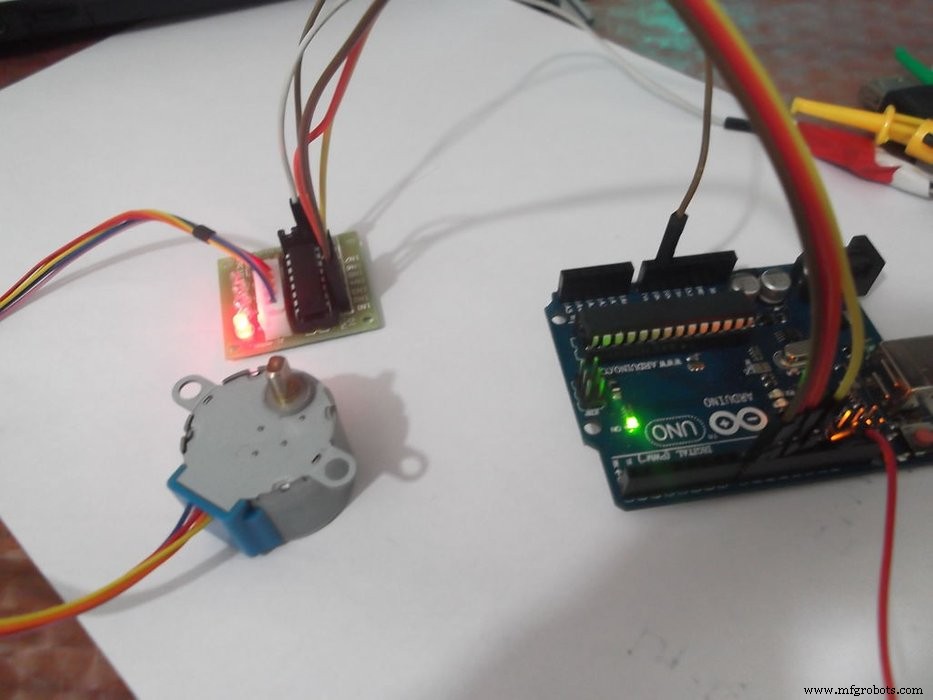
Paso 2:el motor paso a paso
Usé un motor paso a paso unipolar 28-BYJ48 y un controlador de motor paso a paso SBT0811. Cualquier controlador de motor paso a paso que funcione con el 28-BYJ48 debería estar bien, solo asegúrese de conectarlo a su Arduino Uno de acuerdo con la siguiente configuración, o cambie el código para reflejar sus cambios:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5 V
- Gnd >> Suelo
El código para Arduino Uno está en la parte inferior de la página. En este punto, debería poder simplemente cargar el código en su Arduino y tener un motor paso a paso giratorio en el sentido de las agujas del reloj. Si desea cambiar la dirección para girar en sentido antihorario, simplemente cambie la Dirección variable a falso

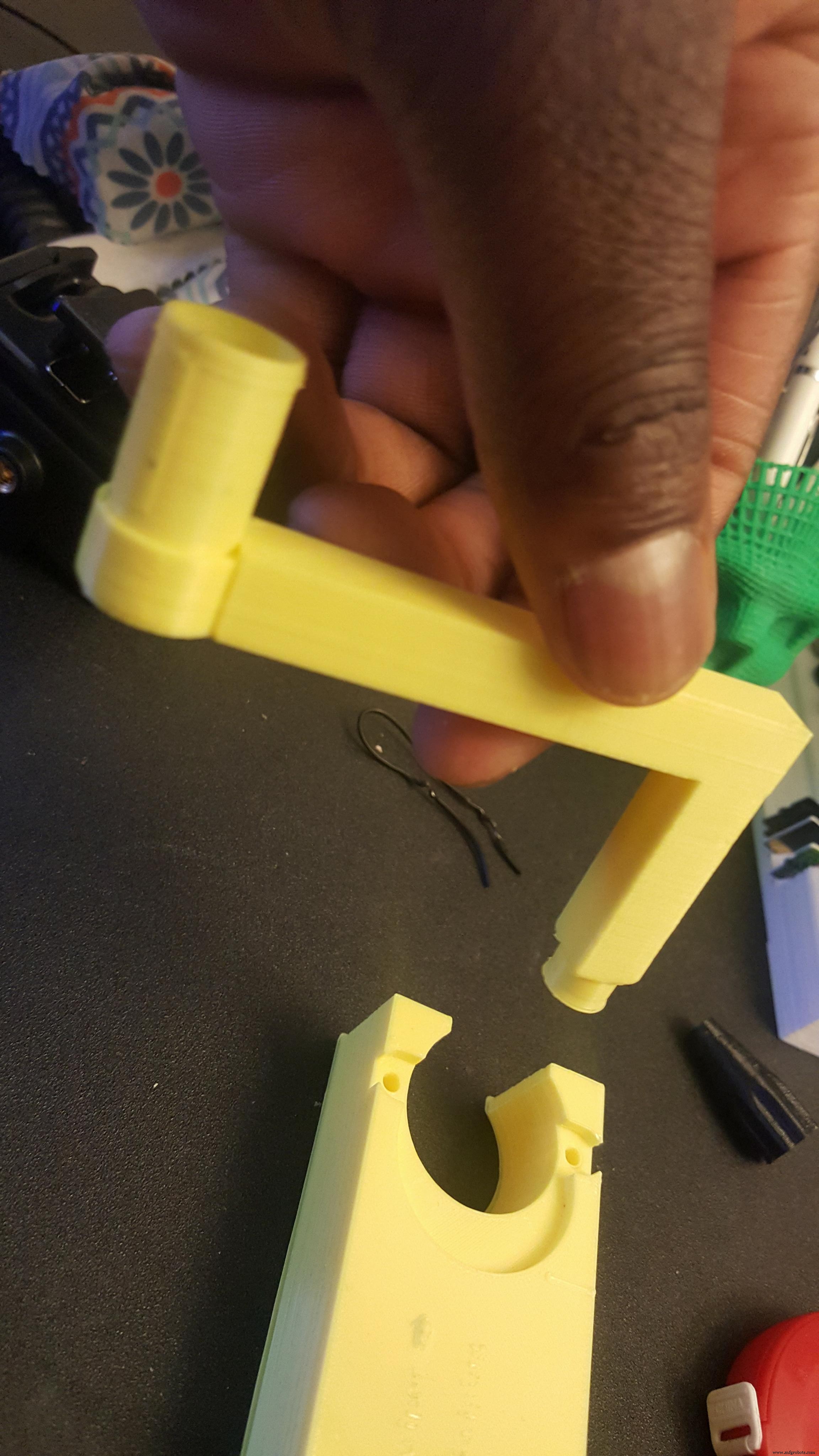
Paso 3:colocar todo junto
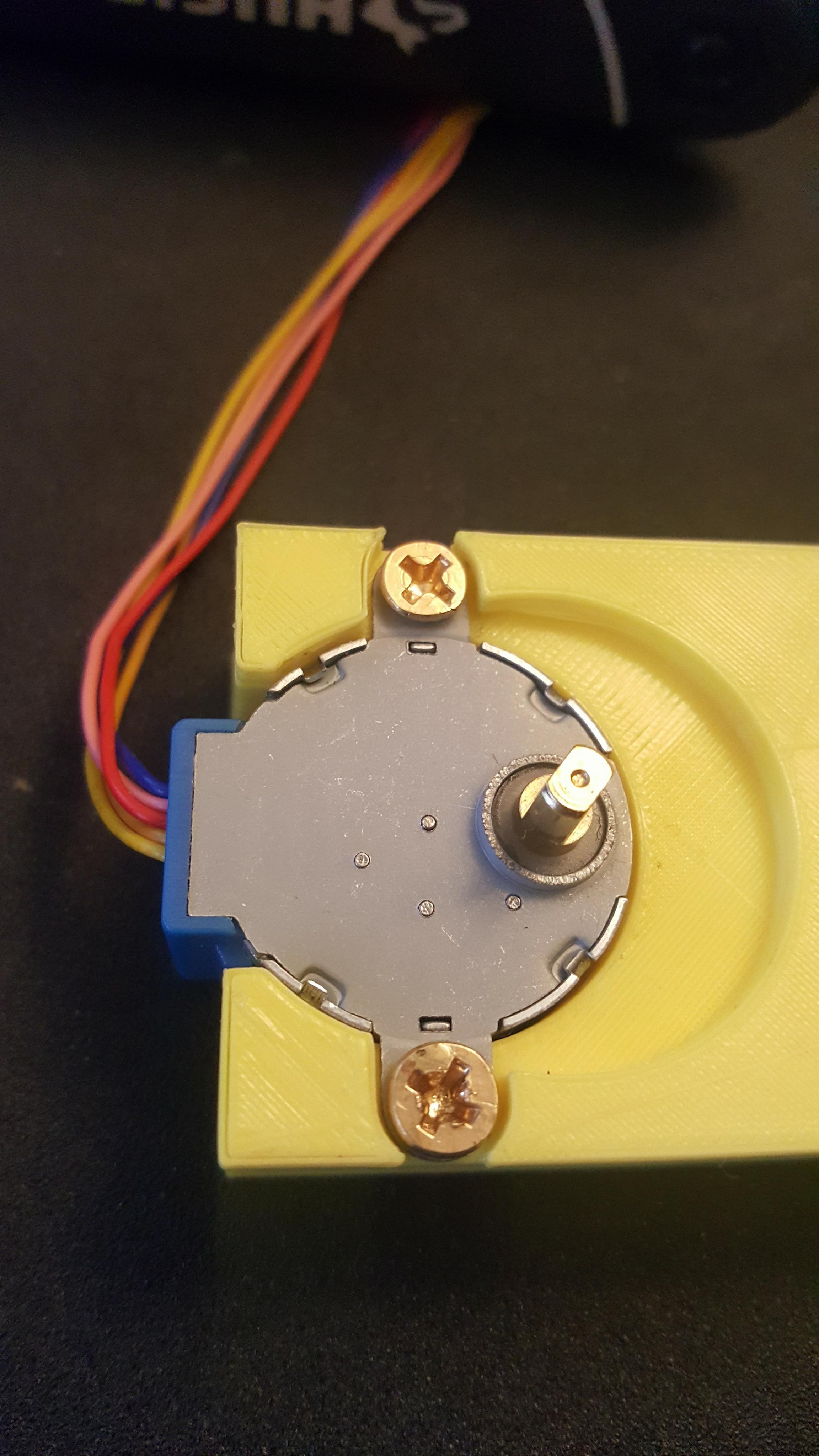
¡En este punto ya tienes todas las partes separadas listas y solo tenemos que combinarlas! Continúe y coloque primero su motor paso a paso dentro de la base deslizante. Usé dos pequeños tornillos para madera para asegurarlo en la impresión 3D.
Luego, continúe y coloque el mango deslizante en el motor paso a paso.
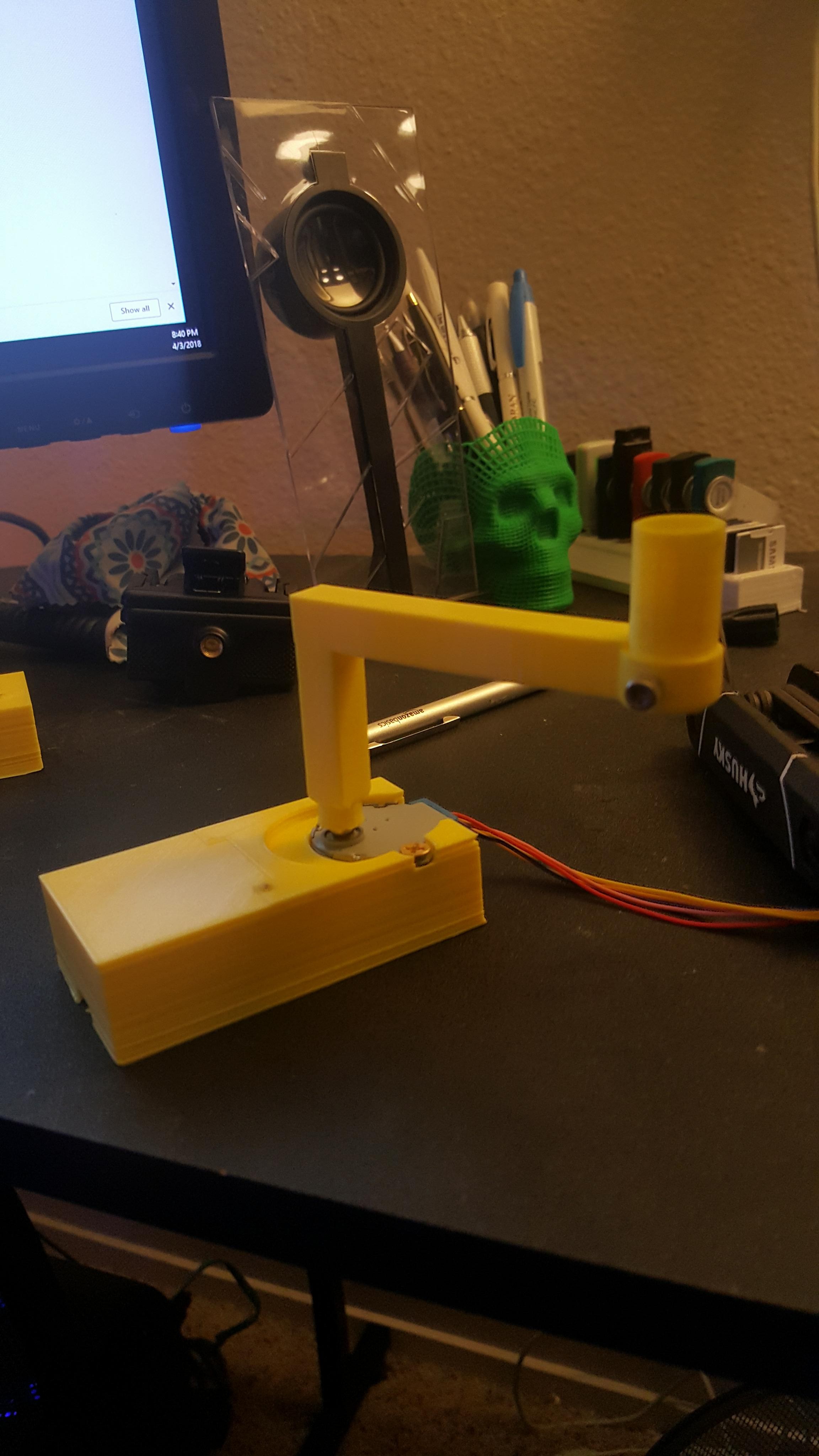
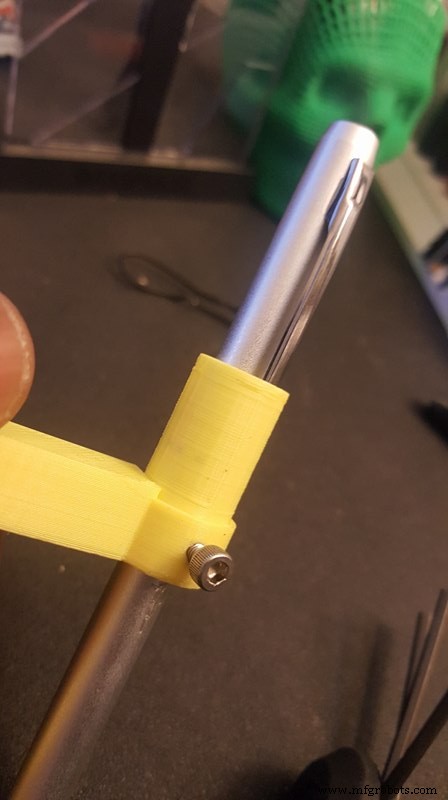
Para calibrar la altura; coloque toda la estructura encima de un teléfono y coloque el lápiz de la pantalla táctil en el mango deslizante hasta que el lápiz de la pantalla táctil toque la pantalla.

En este punto, siga adelante, tome un tornillo M3 corto y asegure su lápiz con pantalla táctil para que no se mueva mientras se desliza.
Finalmente, desliza el dedo
Coloque toda la estructura junto al teléfono, abra la aplicación de citas deseada, encienda la aplicación Arduino y ¡relájese!
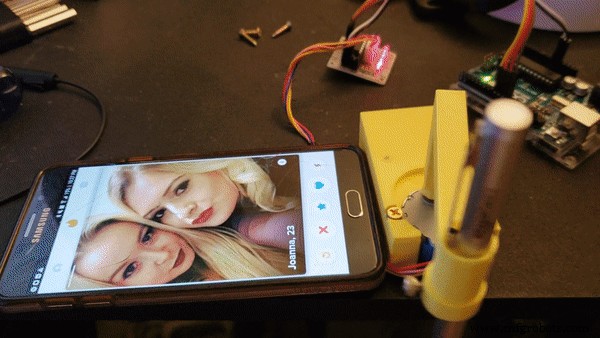
Probé esto en 4 teléfonos diferentes y uno de los teléfonos tenía problemas para registrar correctamente los deslizamientos y pasaba a la pantalla anterior. Esto se debe a que el borde del último teléfono probado era bastante sensible, puede solucionarlo colocando su teléfono en una funda con un borde elevado, de esa manera el lápiz de la pantalla táctil no se registrará en el borde de la pantalla.
Código
- Swiper
Swiper Arduino
¡Cambie Dirección =falso a verdadero si desea cambiar la dirección de deslizamiento! / * BYJ48 Código de motor paso a paso Conecte:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd escrito por:Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 * / # define IN1 8 # define IN2 9 # define IN3 10 # define IN4 11int Steps =0; boolean Direction =false; // cambia a verdadero para deslizamiento a la derecha sin firmar largo last_time; unsigned long currentMillis; int steps_left =4095; long time; void setup () {Serial.begin (115200); pinMode (IN1, OUTPUT); pinMode (IN2, SALIDA); pinMode (IN3, SALIDA); pinMode (IN4, SALIDA); // retardo (1000);} bucle vacío () {while (pasos_izquierda> 0) {currentMillis =micros (); if (currentMillis-last_time> =1000) {paso a paso (1); tiempo =tiempo + micros () - última_hora; last_time =micros (); pasos_izquierda--; }} steps_left =4095;} void stepper (int xw) {for (int x =0; x 7) {Pasos =0;} if (Pasos <0) {Pasos =7; }} Proceso de manufactura
- Motores paso a paso
- Los controladores integrados facilitan el diseño del motor paso a paso
- Prototipo de Raspoulette
- Robot Pi simple
- Torreta centinela Nerf autónoma
- Biblioteca de motores paso a paso bipolares
- SmartWay
- Soporte giratorio basado en pasos controlado por diálogo en serie
- La zona gris entre servomotores y motores paso a paso
- ¿Qué es un motor lineal?
- ¿Qué es un servomotor?