


Brazo robótico MeArm - Su robot - V1.0
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Acerca de este proyecto
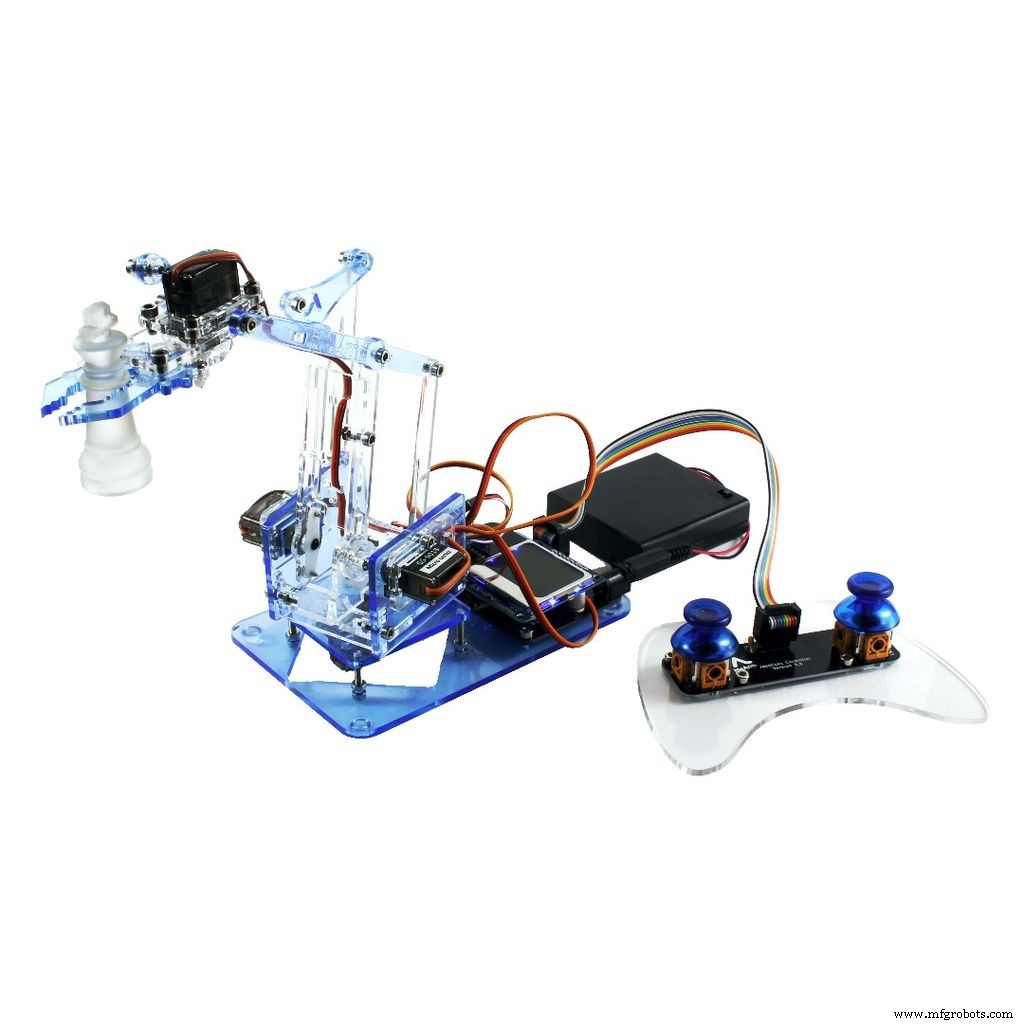
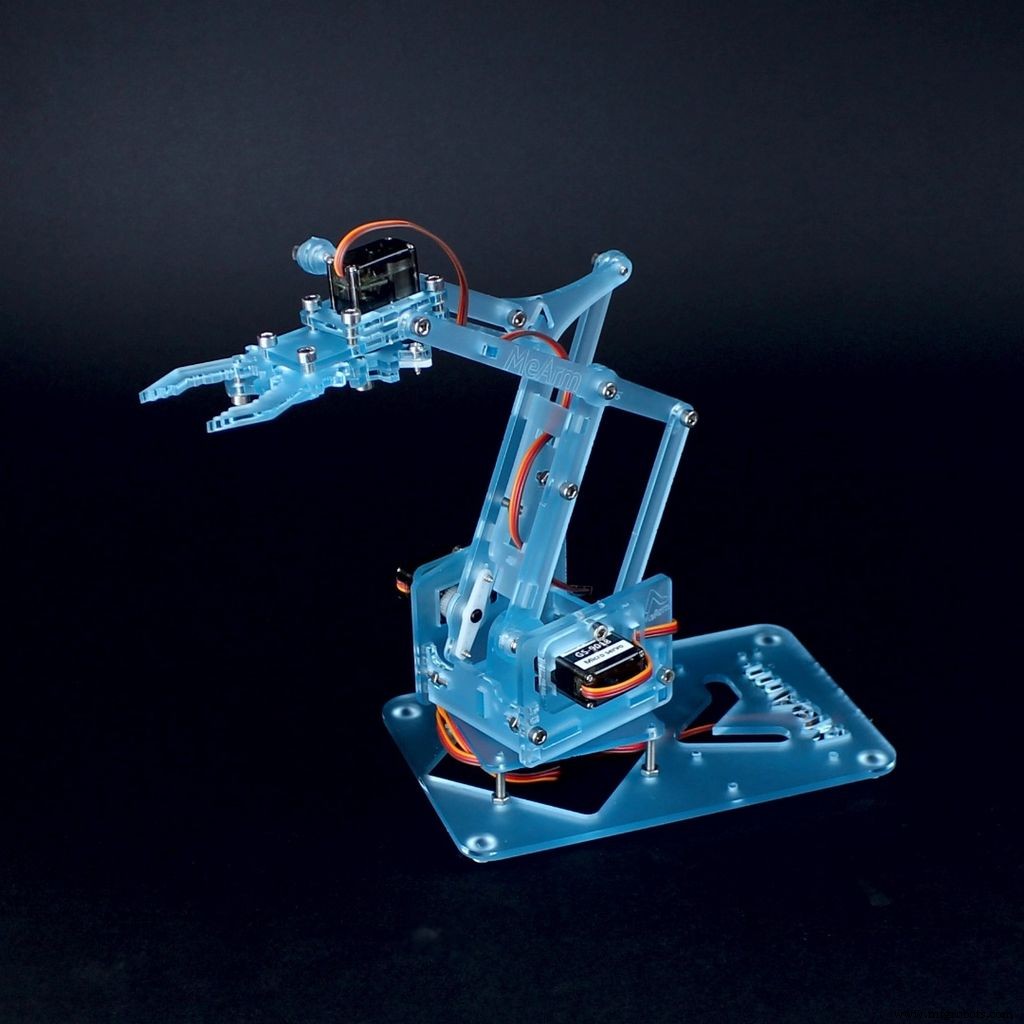
Esta es la última versión de las instrucciones de construcción del brazo robótico MeArm. El MeArm llegó por primera vez a instructables en abril de 2014 cuando obtuvimos un segundo premio en el Concurso de Robots. ¡Desde entonces, hemos visto alrededor de 10,000 construidos en todo el mundo! Solo se muestran algunos en nuestro mapa, pero estamos muy orgullosos de que con la ayuda de instructables nos hayamos convertido en el primer robot viral del mundo.
Hemos reunido estas instrucciones para complementar las de nuestra página de recursos.
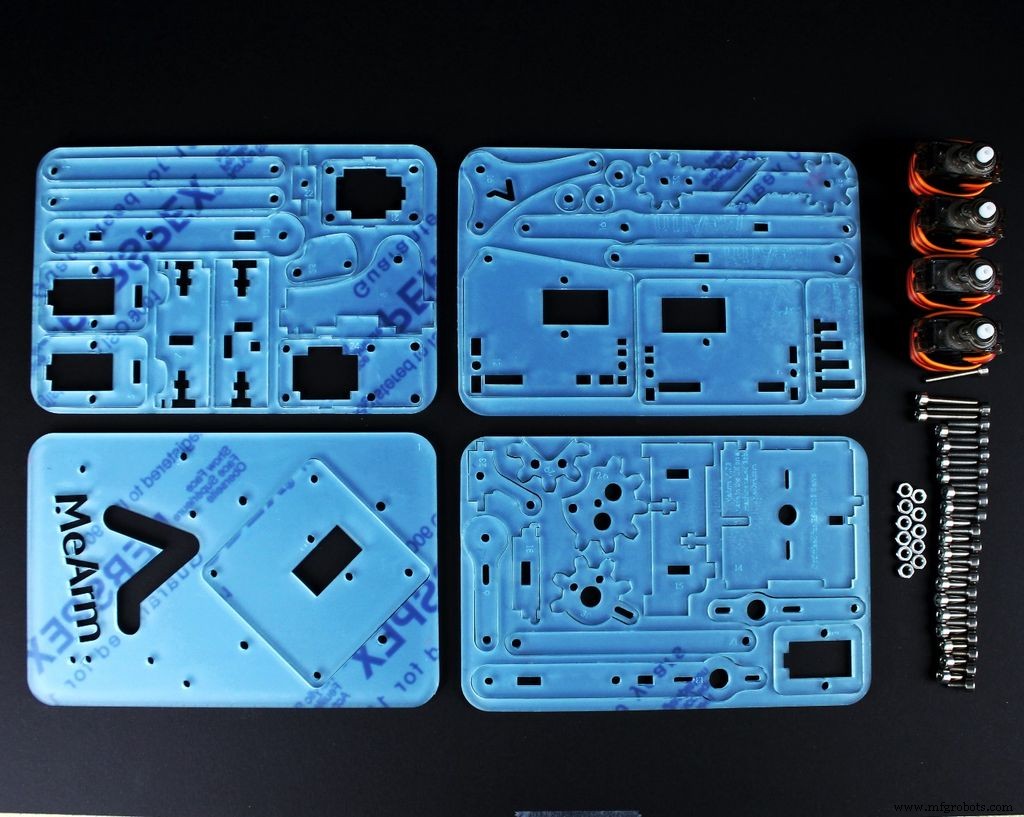
Paso 1:¡Toma tus archivos, enciende tus lazors!
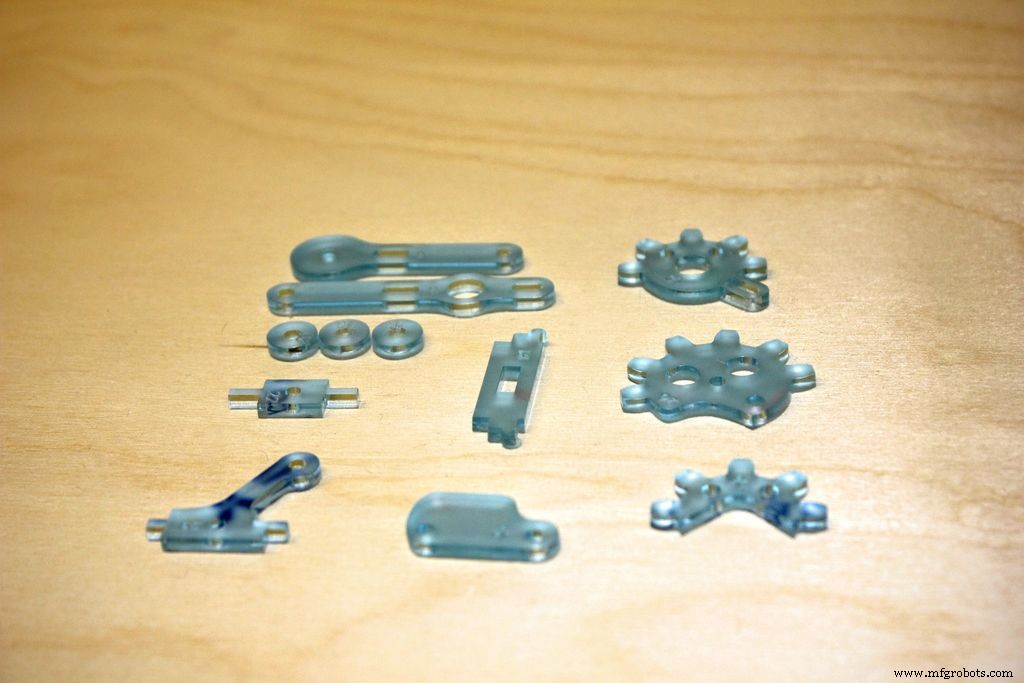
El MeArm sigue siendo y casi siempre ha sido hardware de código abierto. Para que pueda tomar nuestros archivos en Thingiverse. Es un archivo .dxf, por lo que debería funcionar en la mayoría de las cortadoras láser y hemos colocado un recuadro alrededor de las piezas para que pueda configurarlo en el tamaño correcto. Usamos acrílico de 3 mm, pero el diseño es bastante tolerante y lo hemos visto hecho en madera e incluso impreso en 3D.
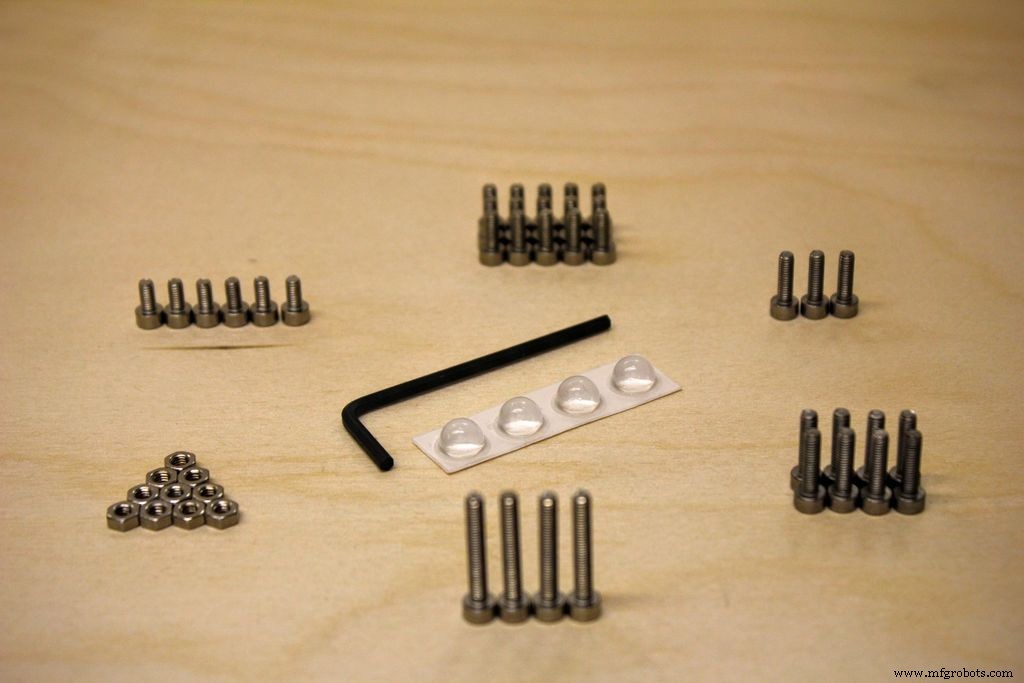
También necesitarás un montón de tornillos. La carga actual requiere:
Tuerca x 11
6 mm x 7
8 mm x 15
10 mm x 5
12 mm x 8
20 mm x 4
Todo el tamaño M3, eso es métrico de 3 mm. Lo que entiendo que puede ser difícil de encontrar en los estados, pero vamos, llegaste a la luna, ¡puedes encontrar una alternativa adecuada!
Paso 2:¡Espera! ¡Calibremos!
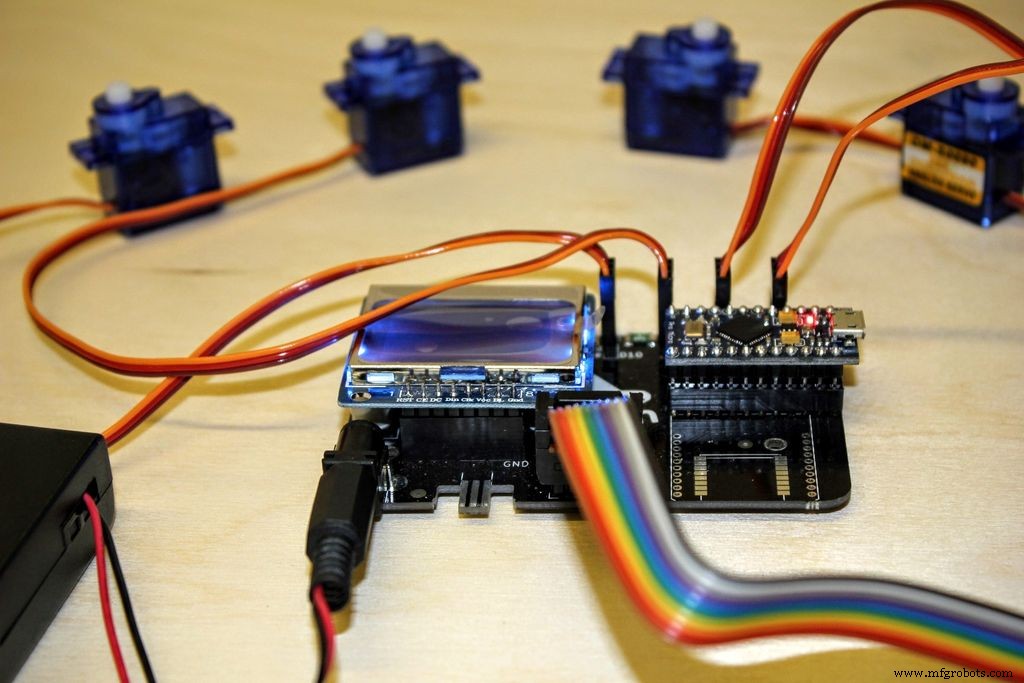
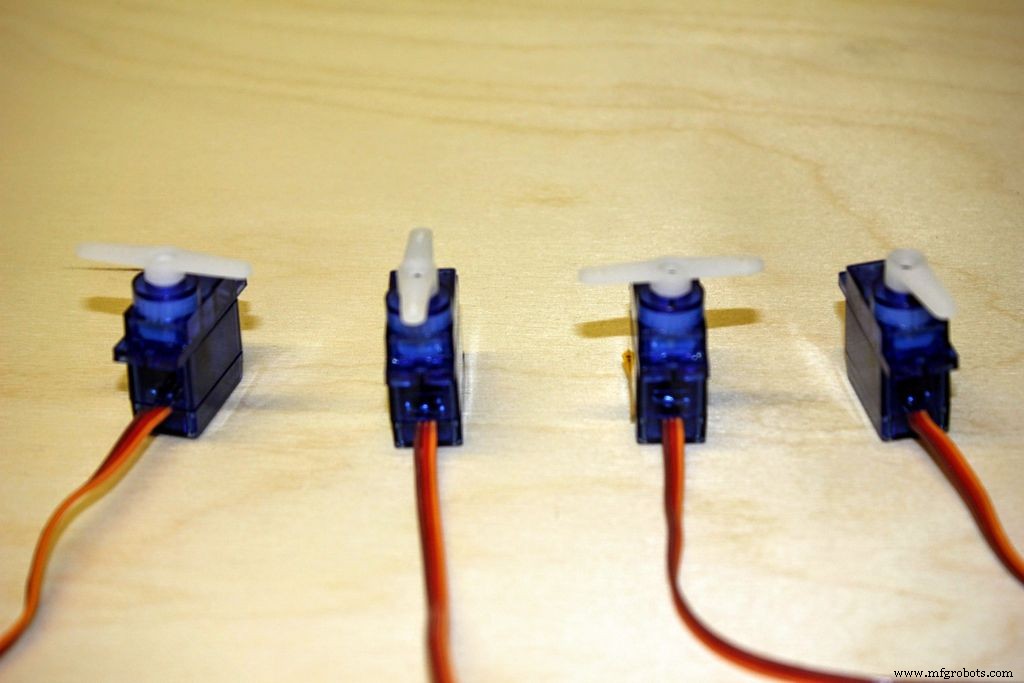

Si ha cortado con láser sus piezas o ha comprado uno de nuestros kits, realmente querrá construirlo. Pero primero debes completar un paso vital. Necesitamos calibrar los servos. Aquí usaremos nuestra placa Brains, que es compatible con Arduino, pero puede usar cualquier cosa que genere una señal PWM para calibrarlos. Hay código MeArm disponible para Arduino, Raspberry Pi, Beaglebone Black, Sparkcore y Espruino.
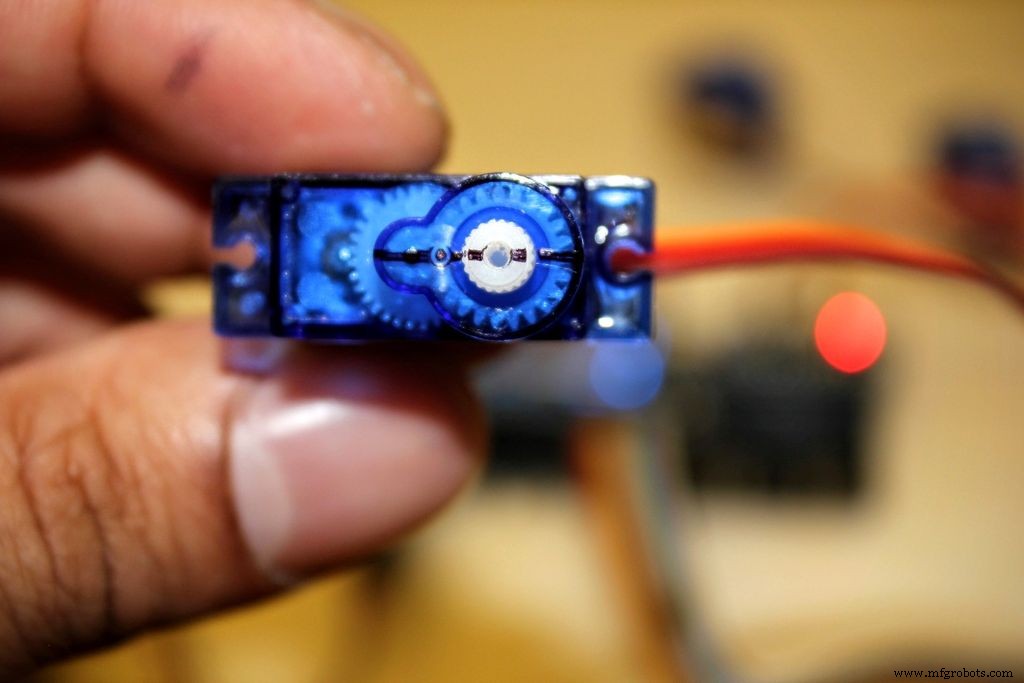
Usando nuestro Brains Board vendrá programado para ir a las posiciones predeterminadas. Que son 90, 90, 90 y 25 para los servos del centro, izquierda, derecha y garra respectivamente. Marque una línea central en el eje y el cuerpo del servo y también puede marcarlos c, l, ryco por otro sistema que signifique algo para usted.
No caigas en la tentación de girarlos a mano, el par de torsión proporcionado por tu poderosa fuerza podría dañar los engranajes del servo. Por la misma razón, es realmente importante que realice este proceso antes de construir su MeArm.
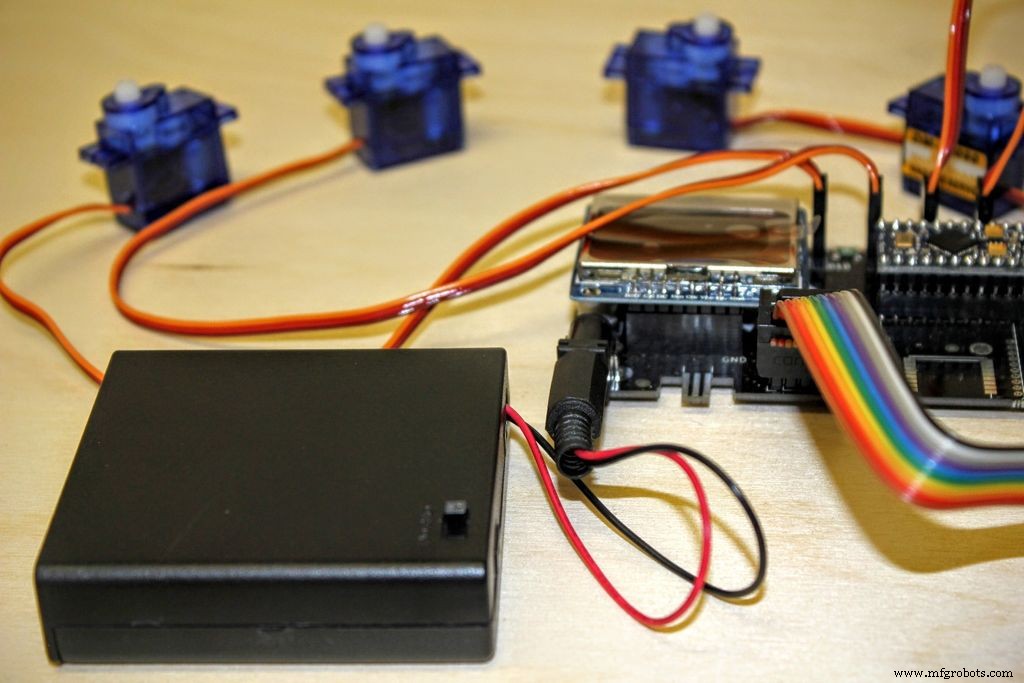
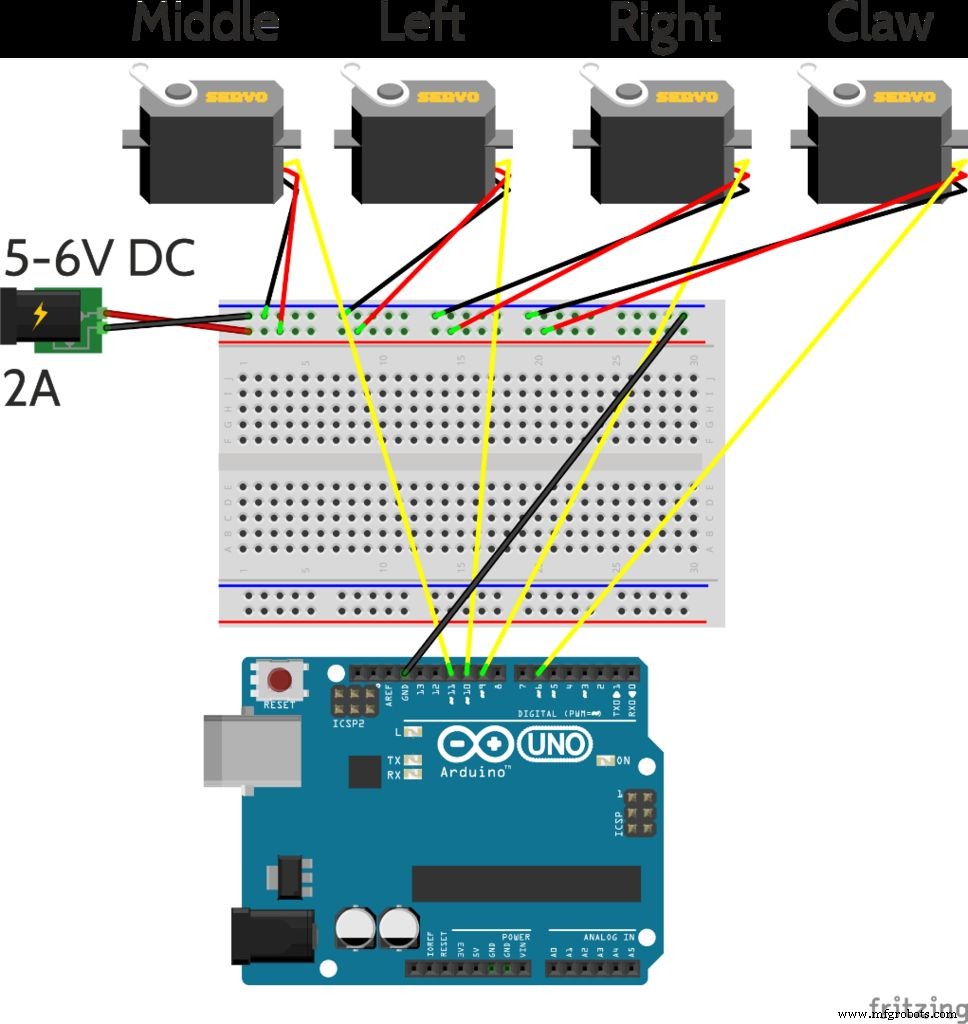
Si está utilizando y Arduino, la configuración que se muestra en la imagen de arriba y este código le dará el mismo resultado. Usamos Codebender para nuestro código de demostración y nos encantaría una camiseta. Por lo tanto, utilice este enlace si va a abrir una cuenta.
La parte más importante que debe darse cuenta al configurar sus servos es que no puede alimentarlos a través de su microcontrolador. Necesita una fuente de alimentación separada de 5-6V 2A, con una tierra común para el microcontrolador. Consulte la imagen de configuración de Arduino para obtener más información.
Paso 3:¡Vamos!
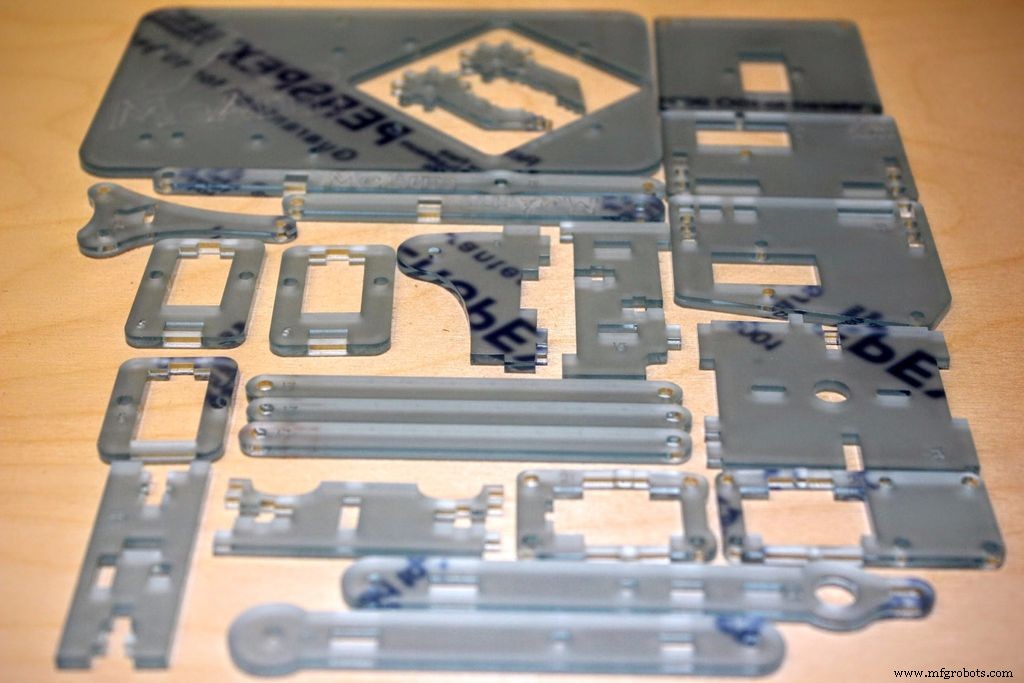
Con sus servos calibrados, podemos rompernos. ¡Literalmente si tienes uno de nuestros paquetes instantáneos!
Probablemente tendrás que dedicar un tiempo a quitar el respaldo protector de las piezas acrílicas. Puede hacerlo sobre la marcha o todo a la vez. Tu llamada.
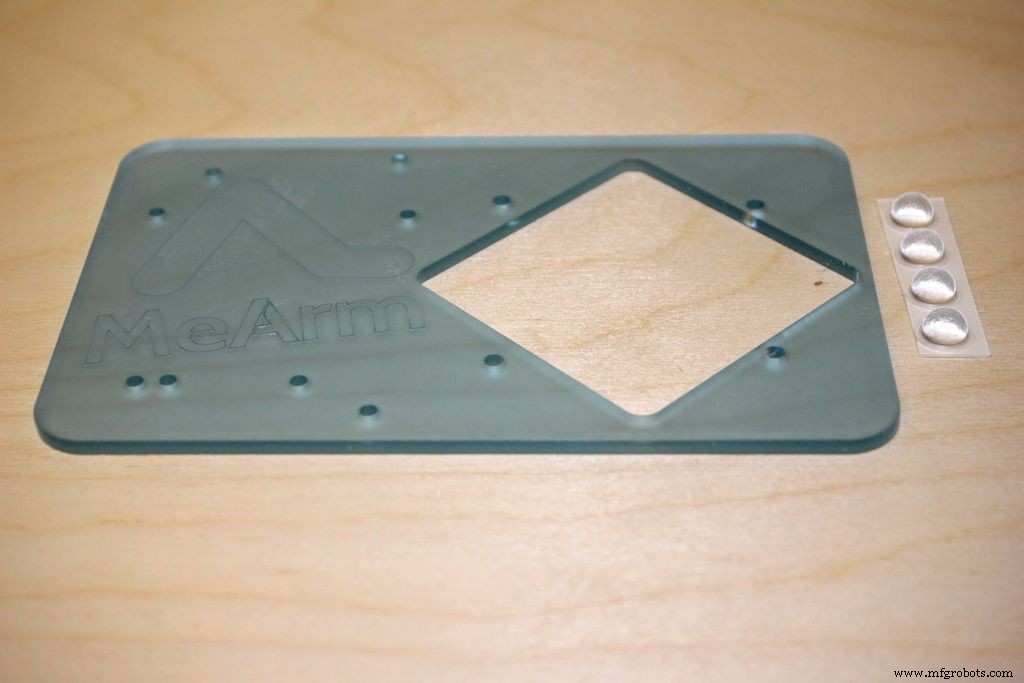
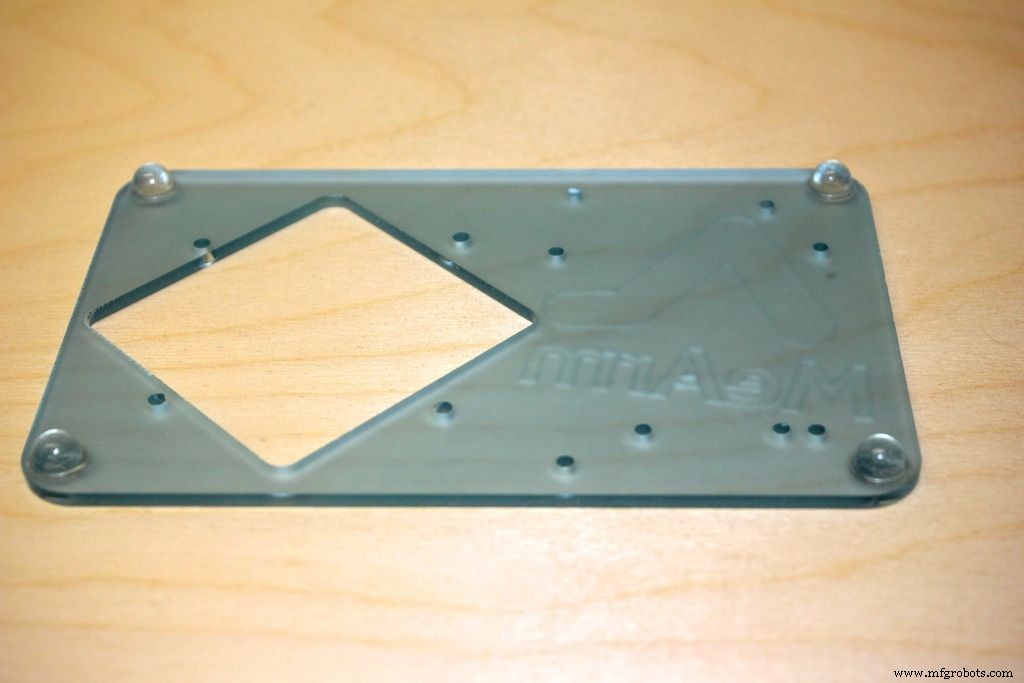
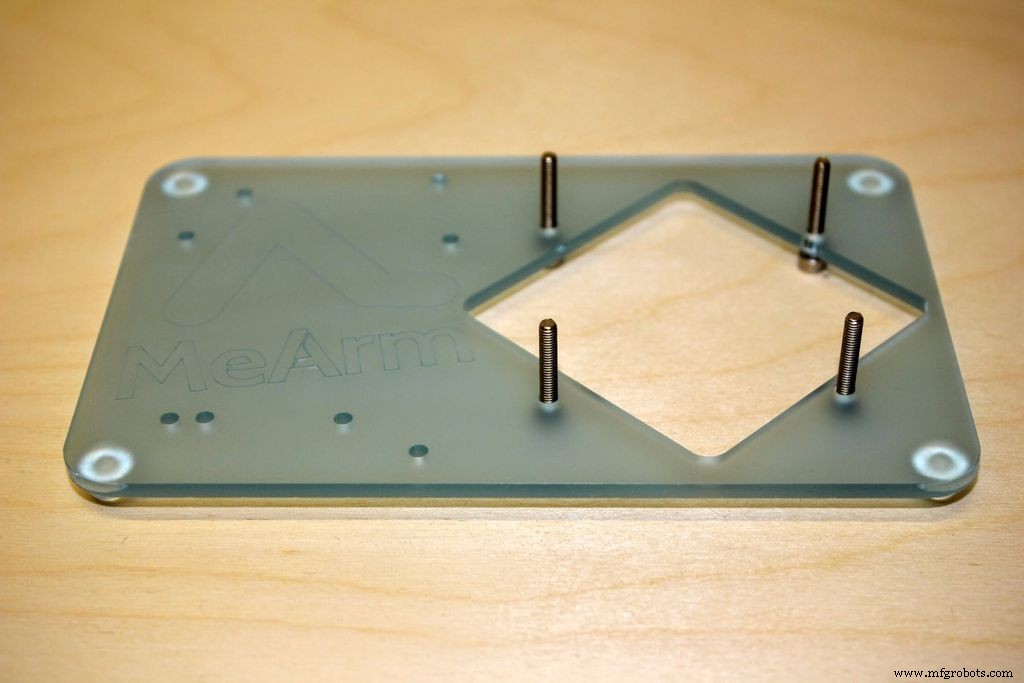
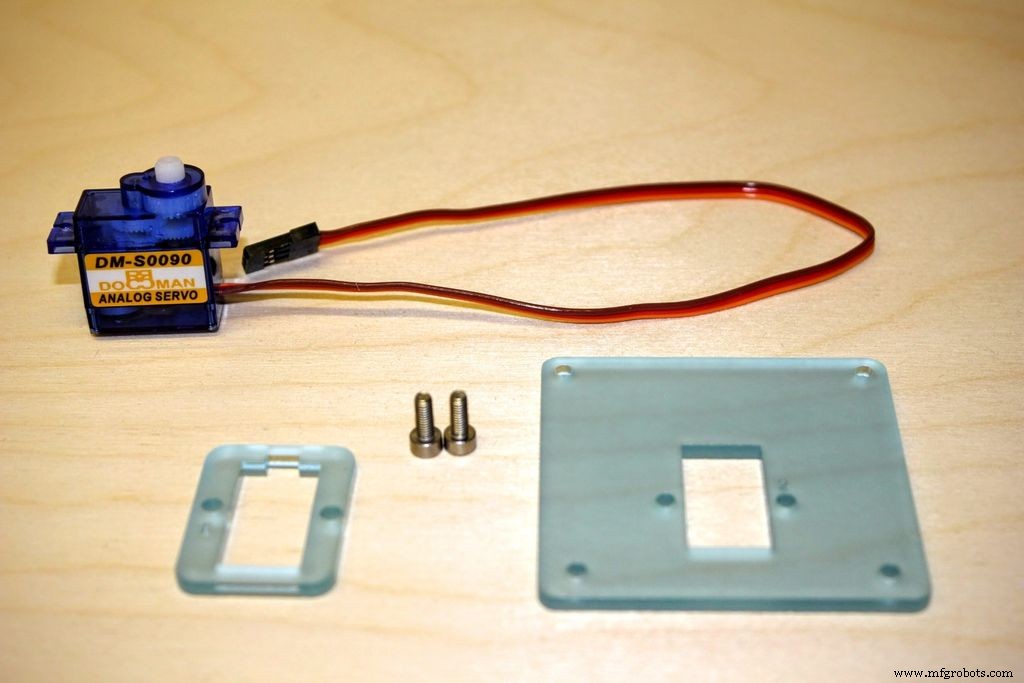
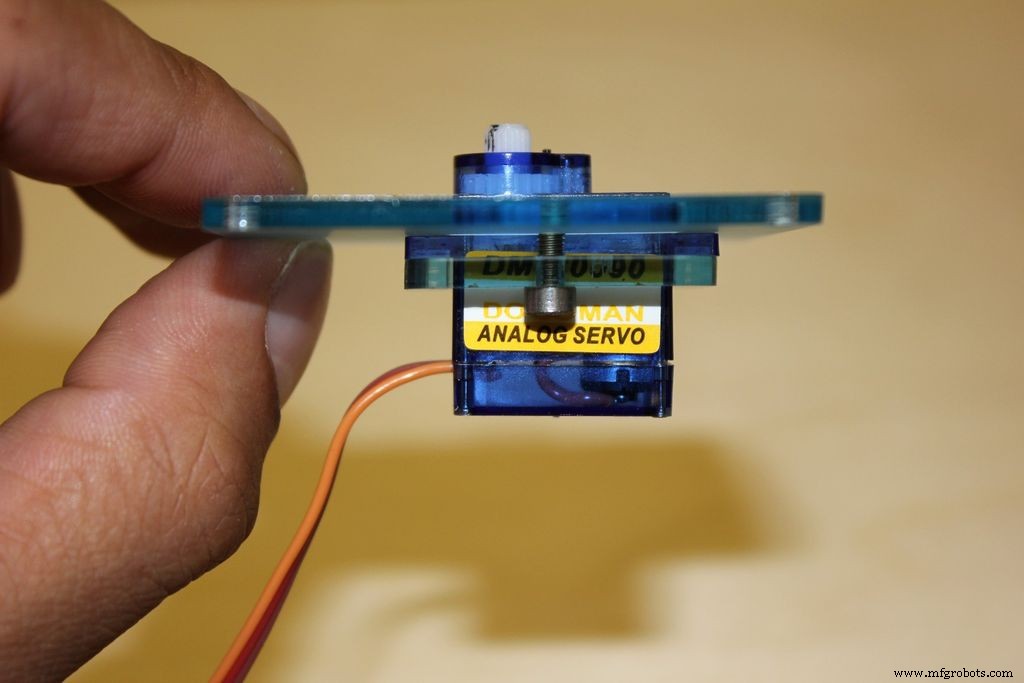
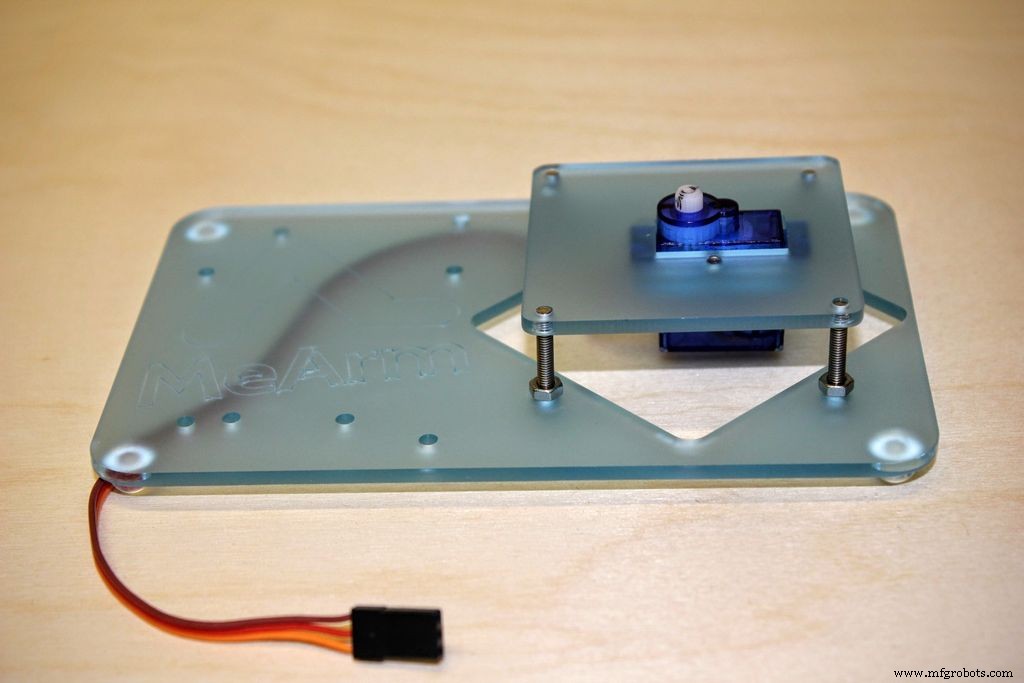
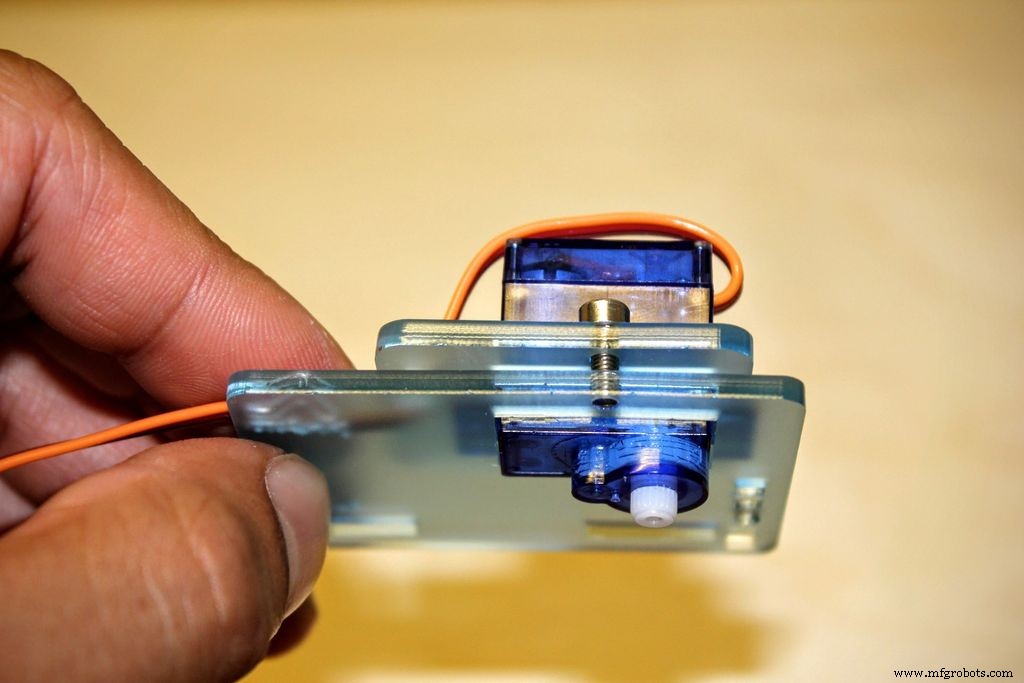
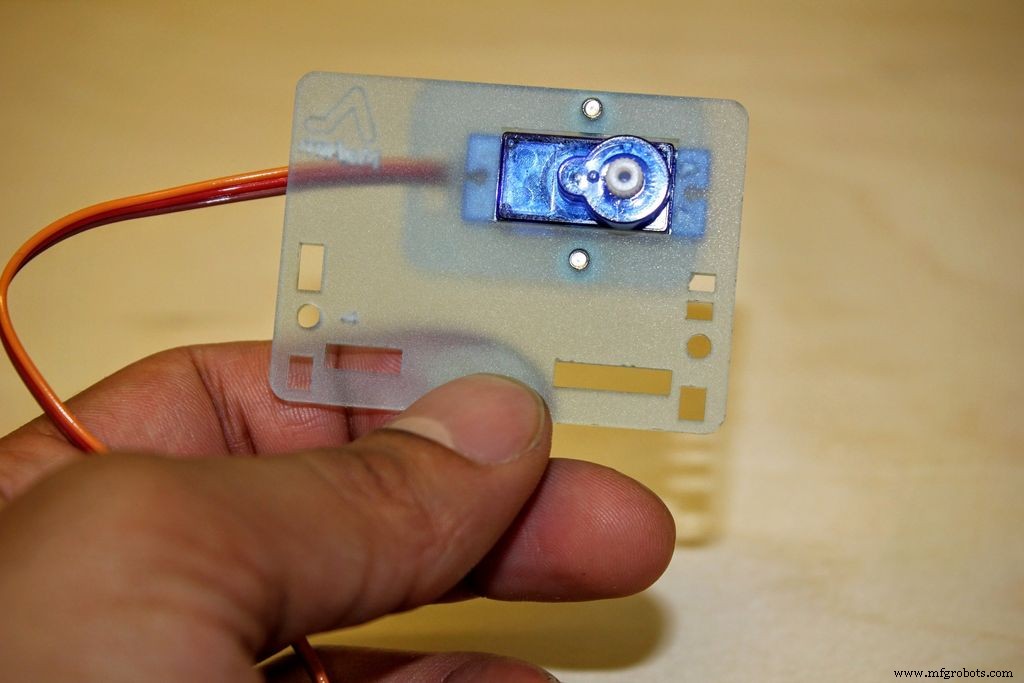
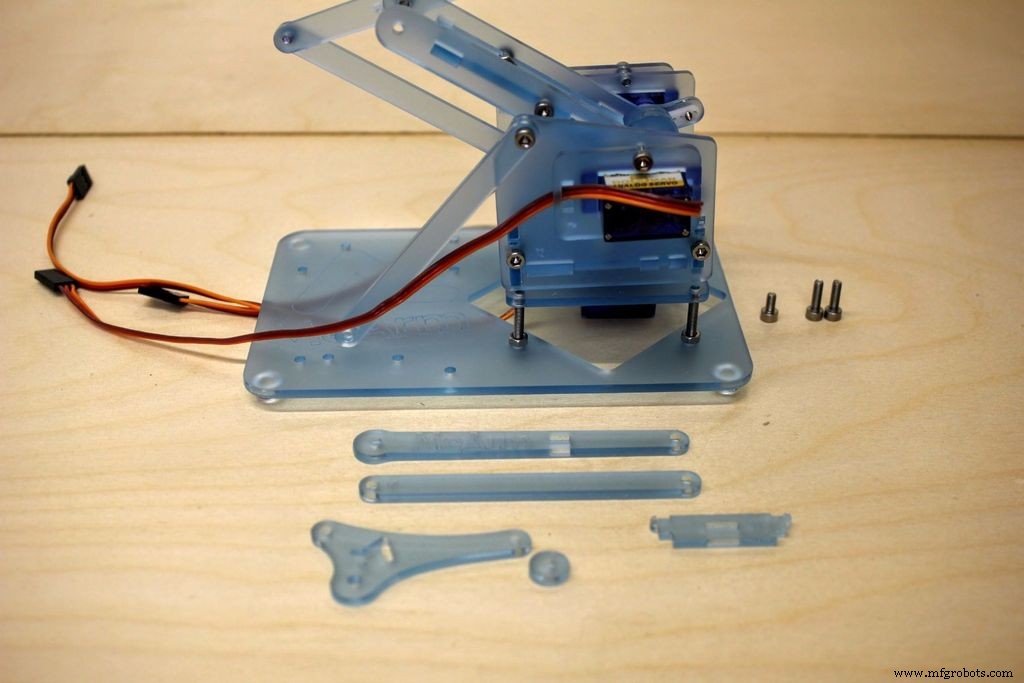
Localice la parte más grande (n. ° 1) y coloque los pies de la almohadilla adhesiva en sus esquinas. Luego inserte los cuatro tornillos de 20 mm desde la parte inferior y atornille cuatro tuercas hasta la mitad. Ahora busque la parte n. ° 2, n. ° 3, su servo central y dos tornillos de 8 mm. Pase el servo a través de la pieza n. ° 3, que llamamos collar. Empuje los tornillos a través del collar y luego atorníllelos en la pieza n. ° 2.
Los tornillos se autoperforan en la parte n. ° 2, esto significa que cortan su propia rosca. En el MeArm hay dos tamaños de orificios, uno de alrededor de 3 mm donde puede empujar el tornillo y el otro de alrededor de 2,6 mm donde queremos que el tornillo se autoperfore. Este es un método que tomamos prestado del increíble PlotClock de Joo.
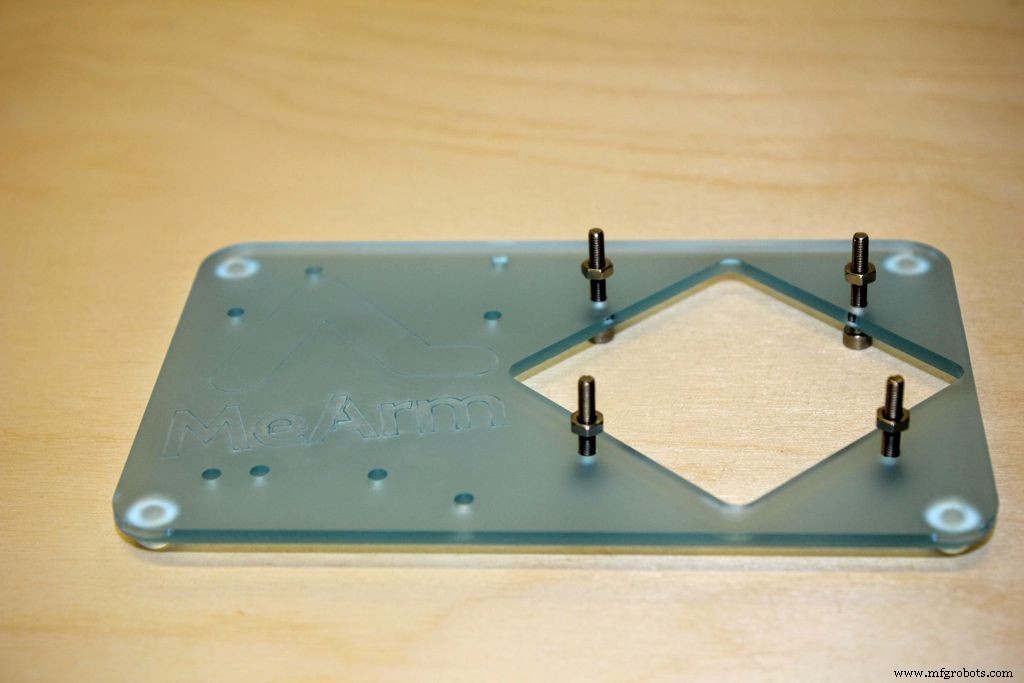
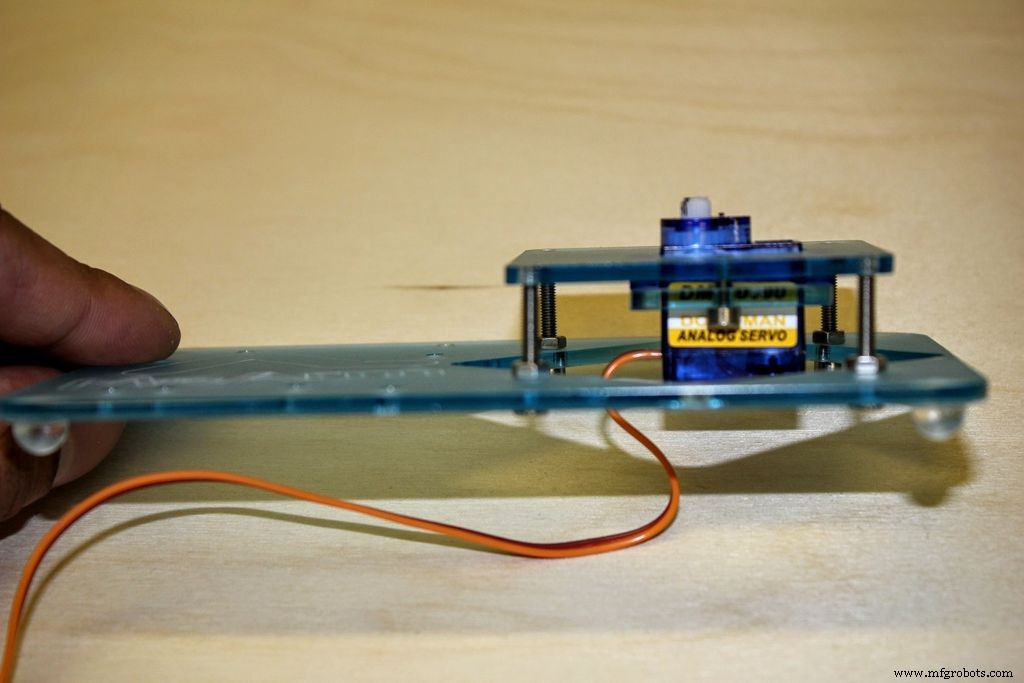
Ahora conectamos el conjunto de servo / collar a la parte n. ° 1 a través de los tornillos de 20 mm, estos se autoperforarán y la orientación de los orificios en las partes debería significar que no puede hacerlo al revés. Esto se llama Poka-yoke y es un método para diseñar diseños a prueba de tontos. Si tiene un modelo anterior v1.0, verá que mi intento de hacerlo es demasiado entusiasta, ya que solo hay 1/8 de formas de hacerlo bien (si no puede hacer coincidir los orificios, voltee la pieza). La versión posterior fue moderada por el consejo de Scott Pierce y tiene 1/2 formas.
Paso 4:lado izquierdo
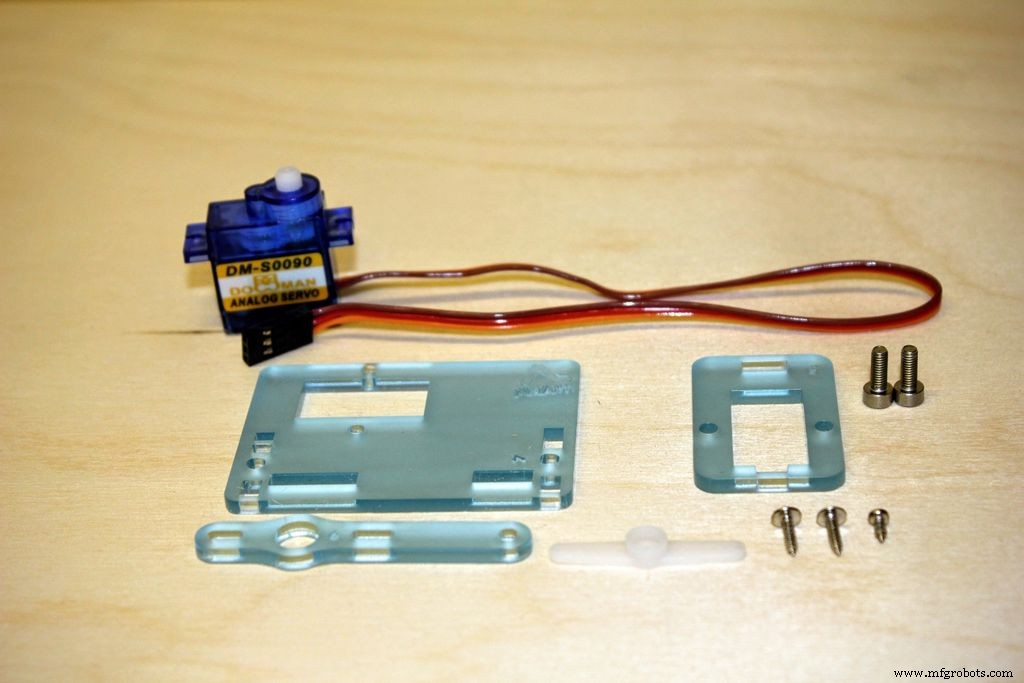
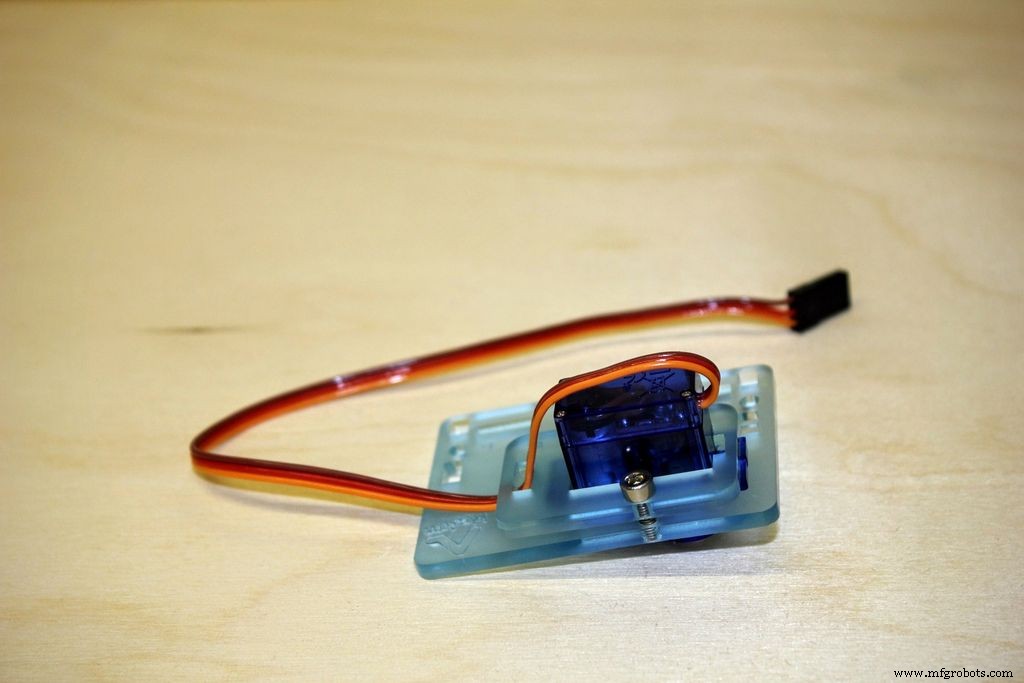

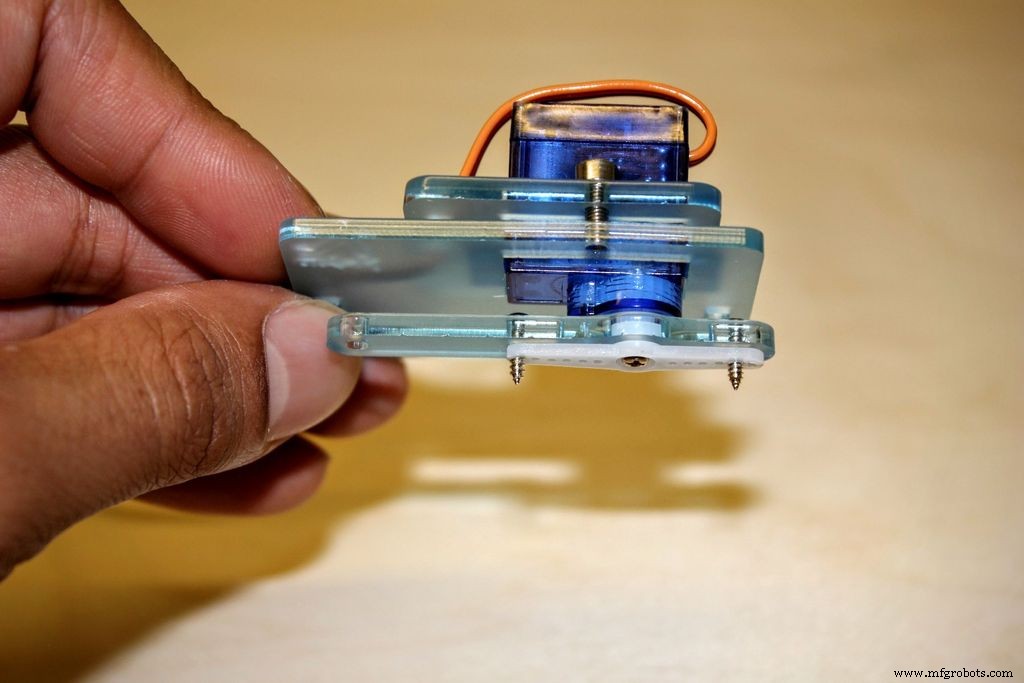
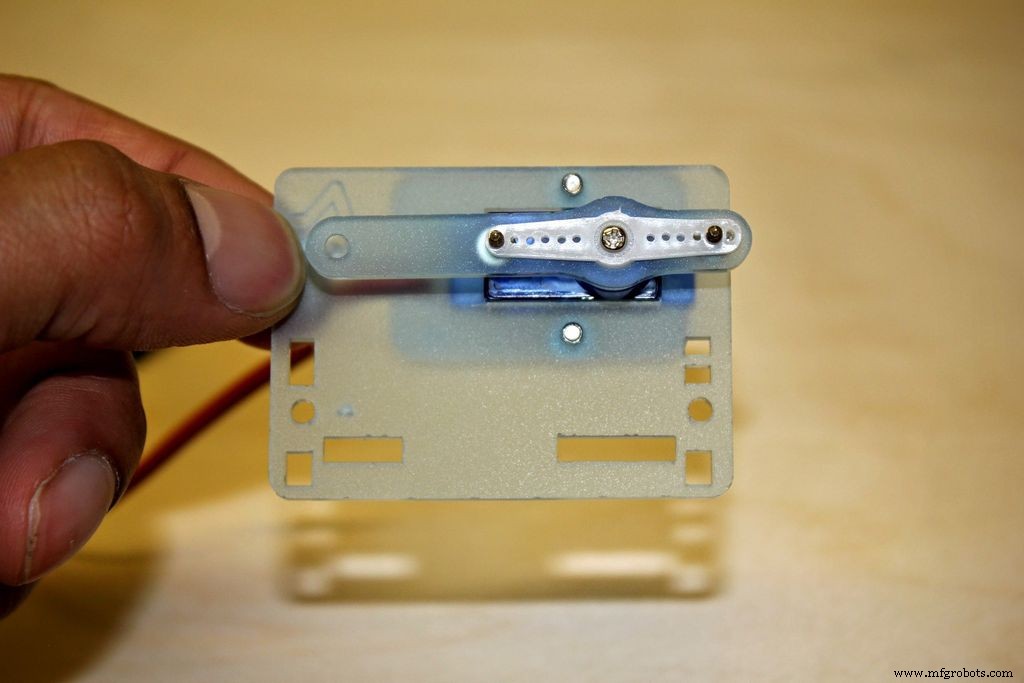
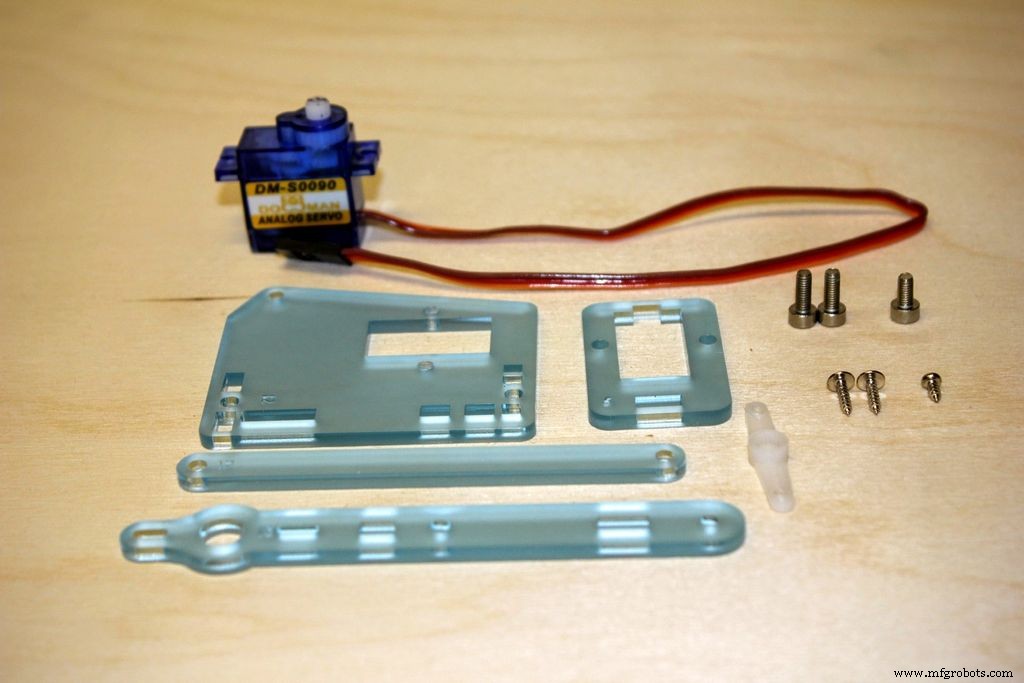
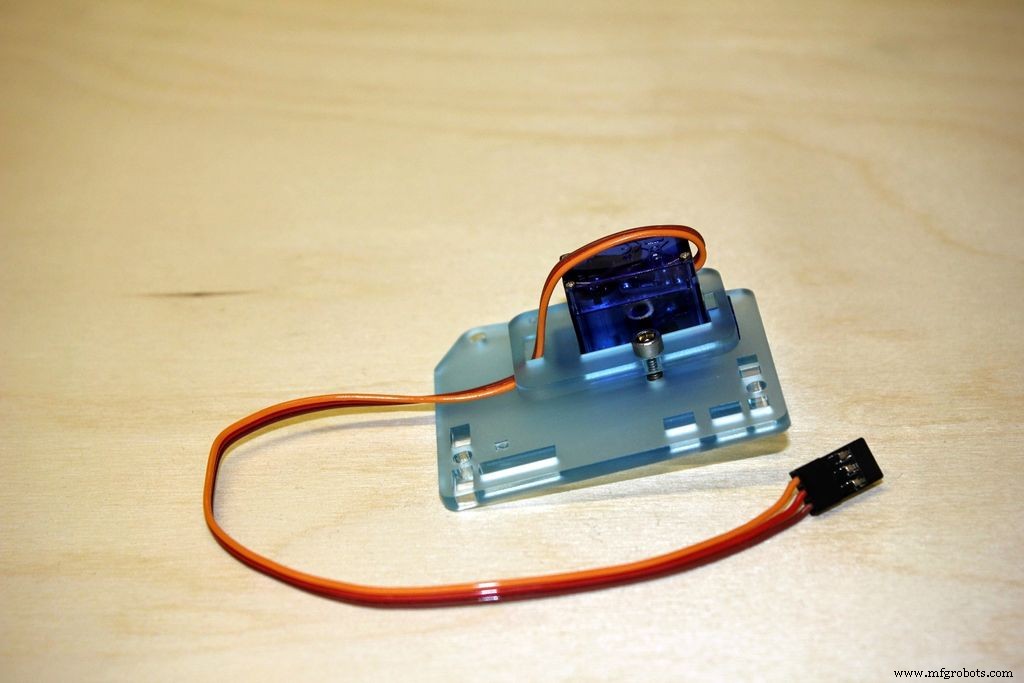
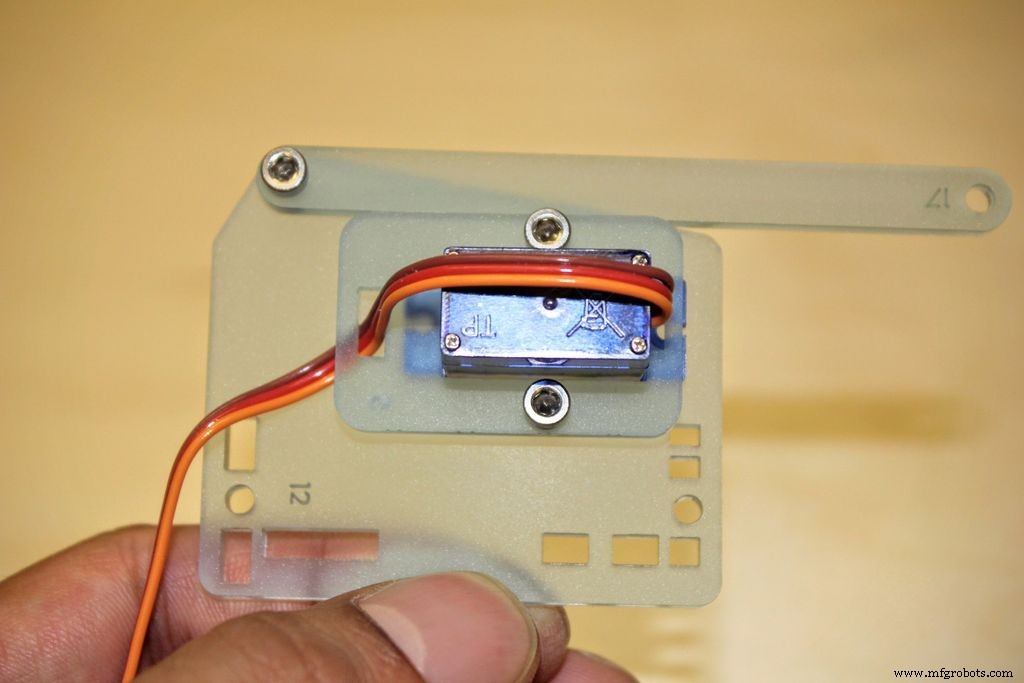
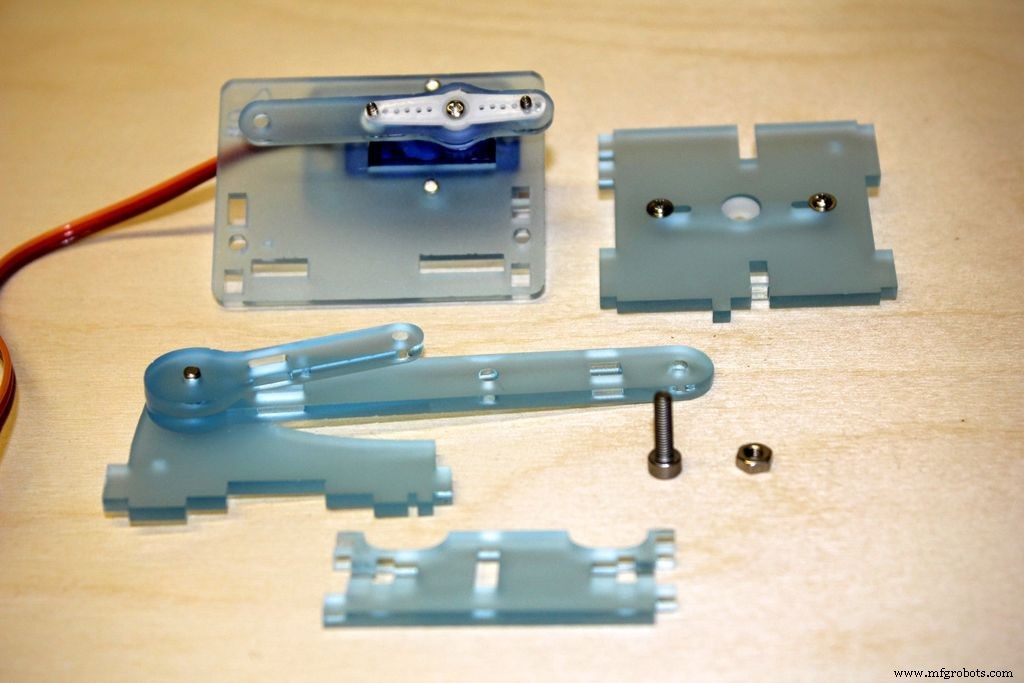
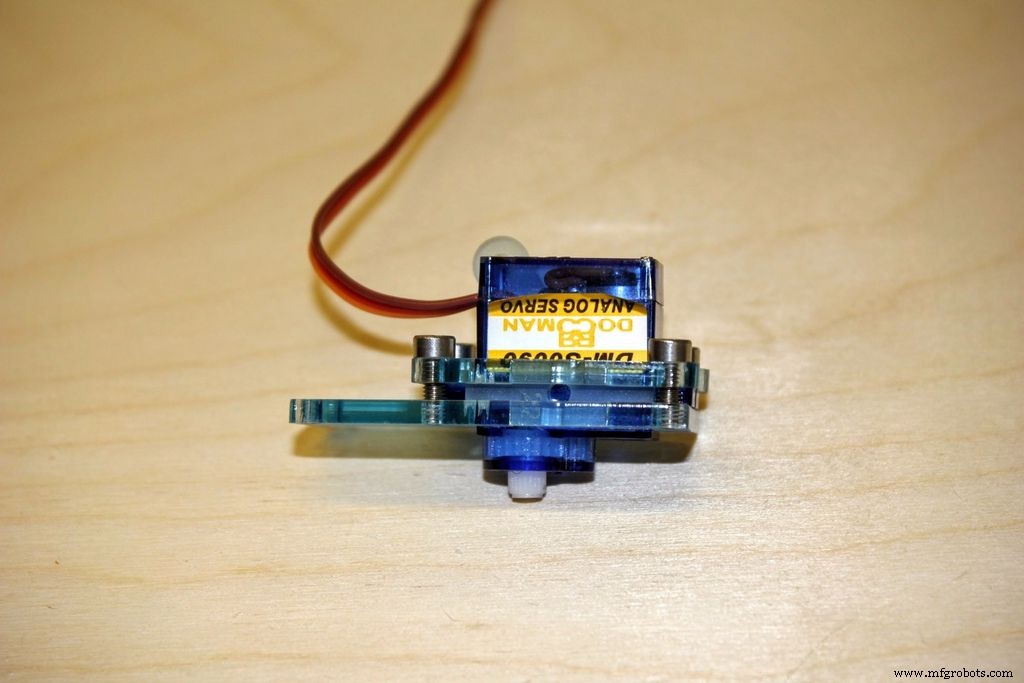
Ahora ubique las piezas n. ° 4, n. ° 5, n. ° 6, servo izquierdo, dos tornillos de 8 mm y un paquete de fijación del servo.
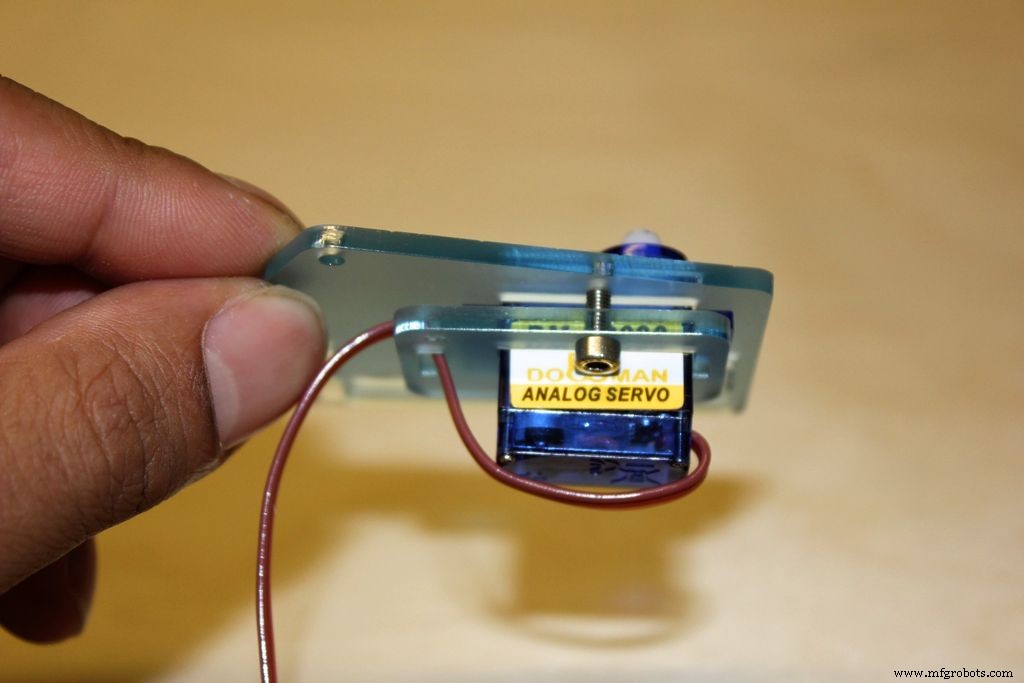
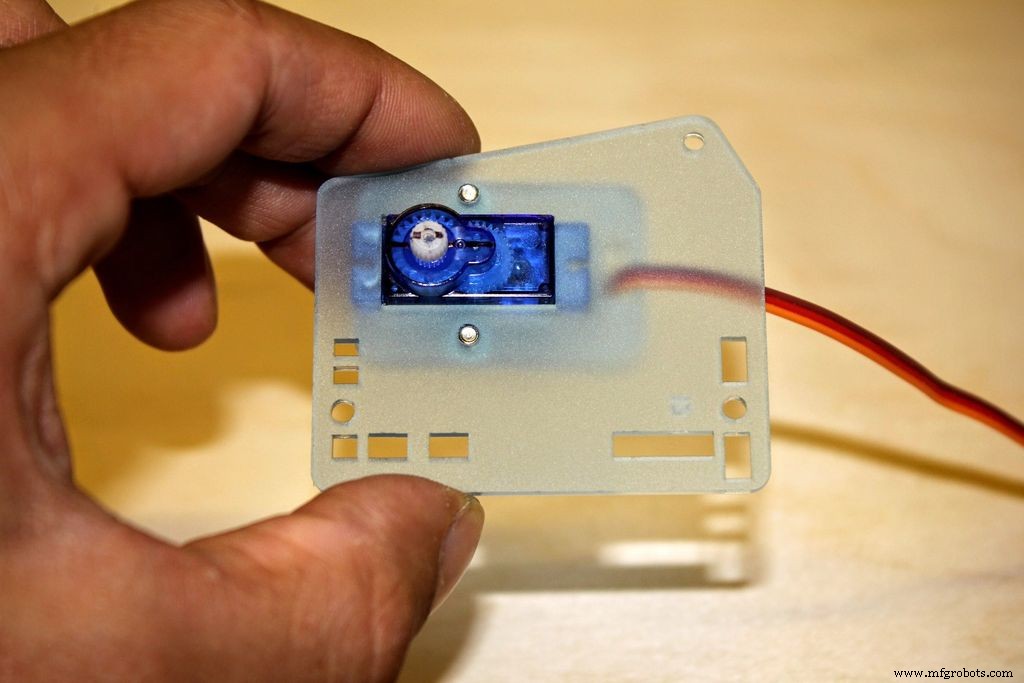
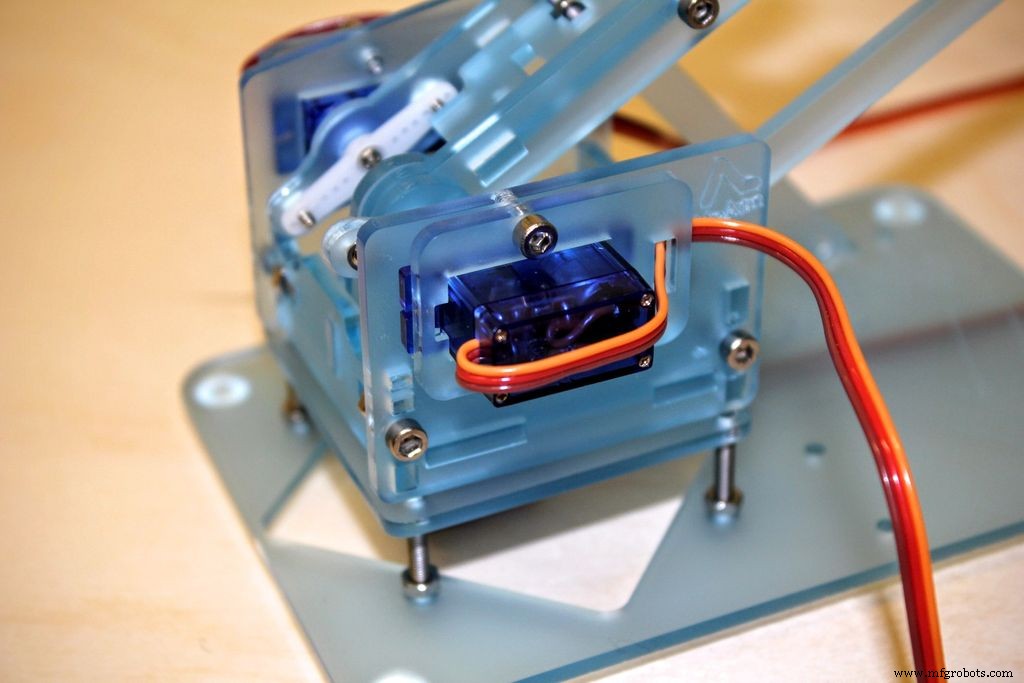
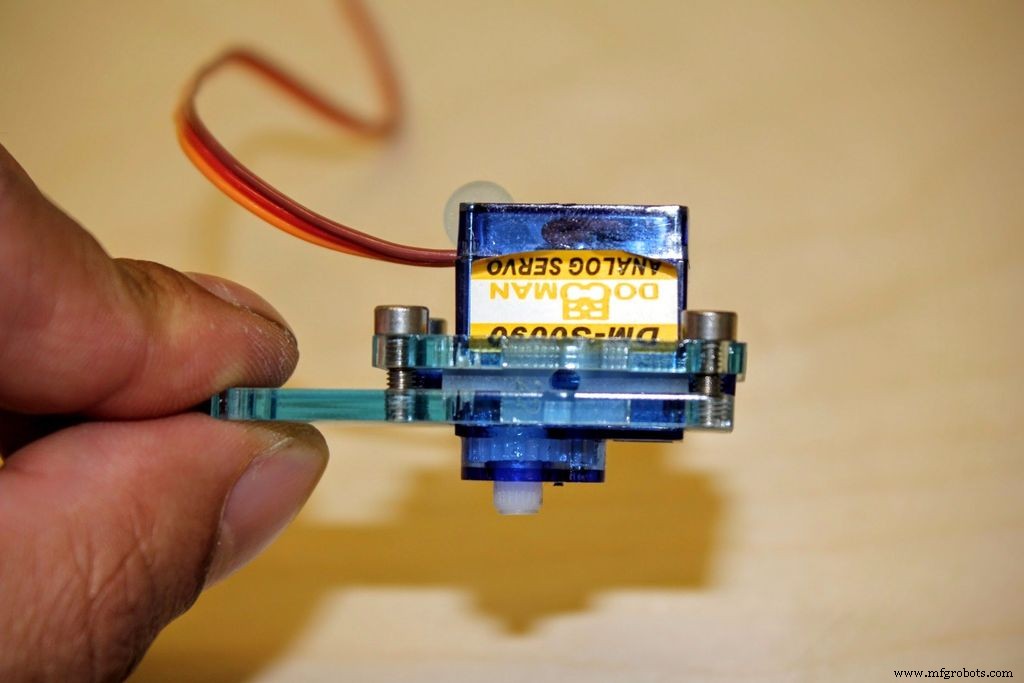
Pase el servo a través del collar (parte # 5) y luego el cable del servo a través del orificio para ordenar el cable. Atornille el collar a la pieza n. ° 4 con los tornillos de 8 mm teniendo cuidado de no apretar demasiado . No desea que el acrílico se doble, simplemente mantenga el servo en su lugar.
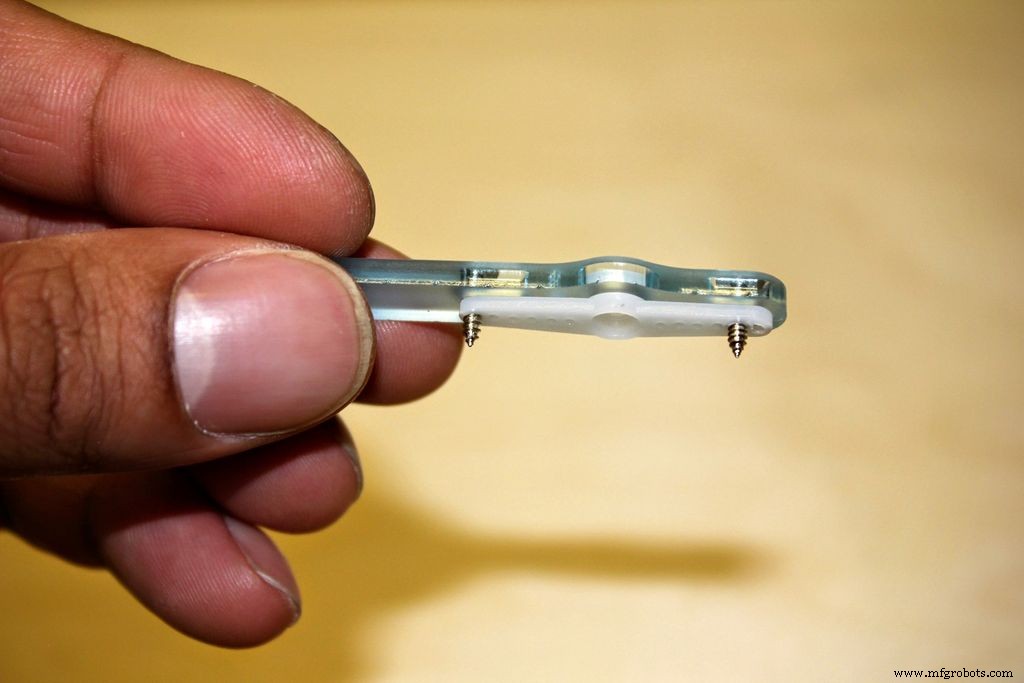
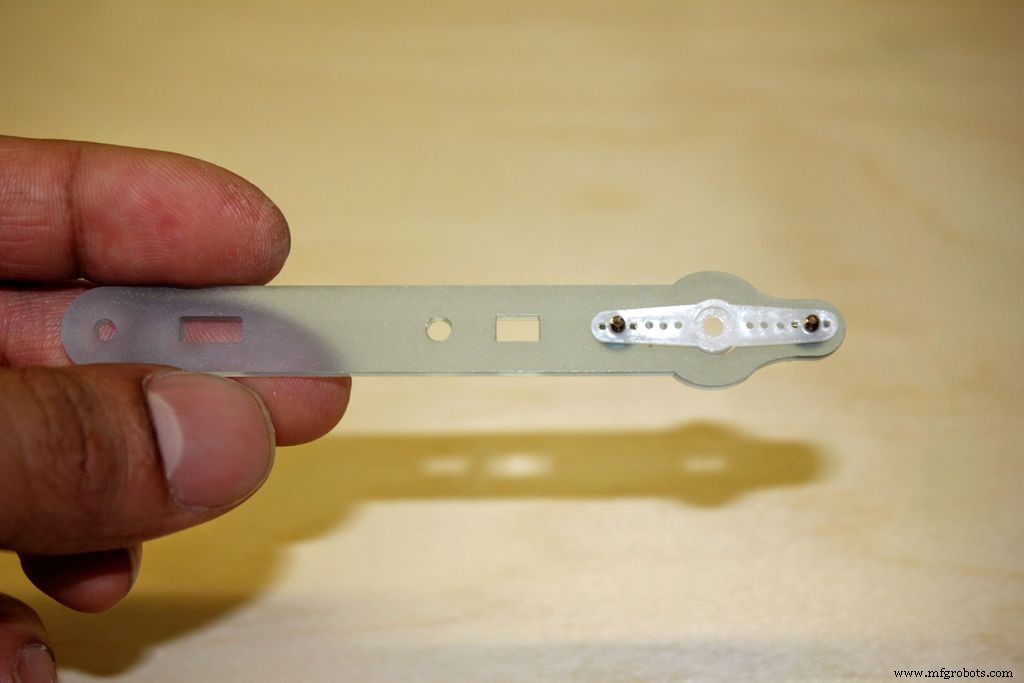
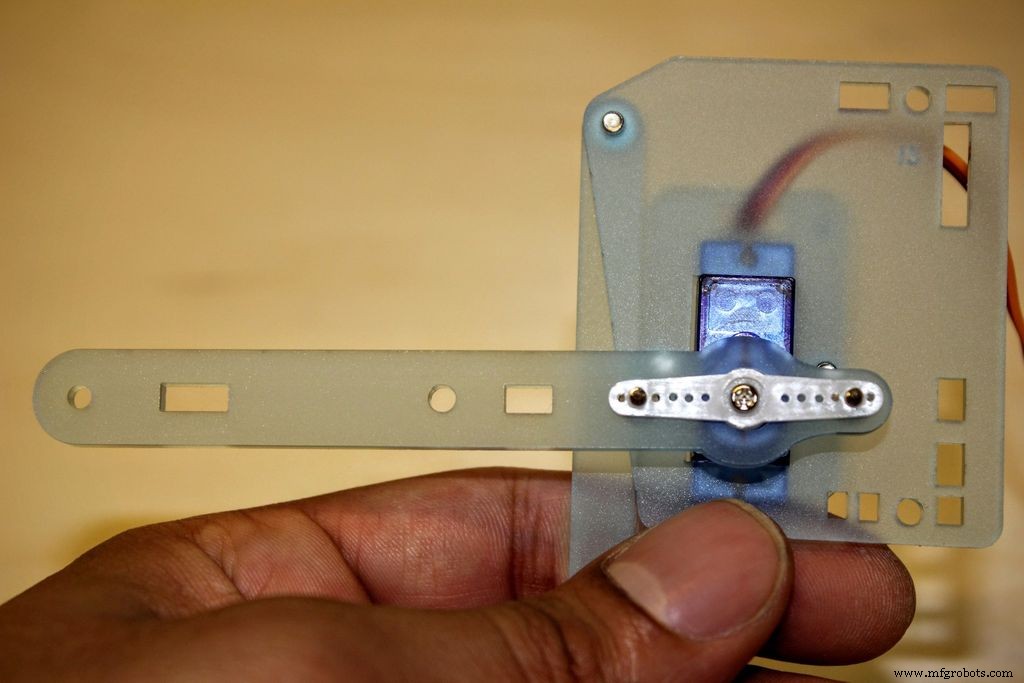
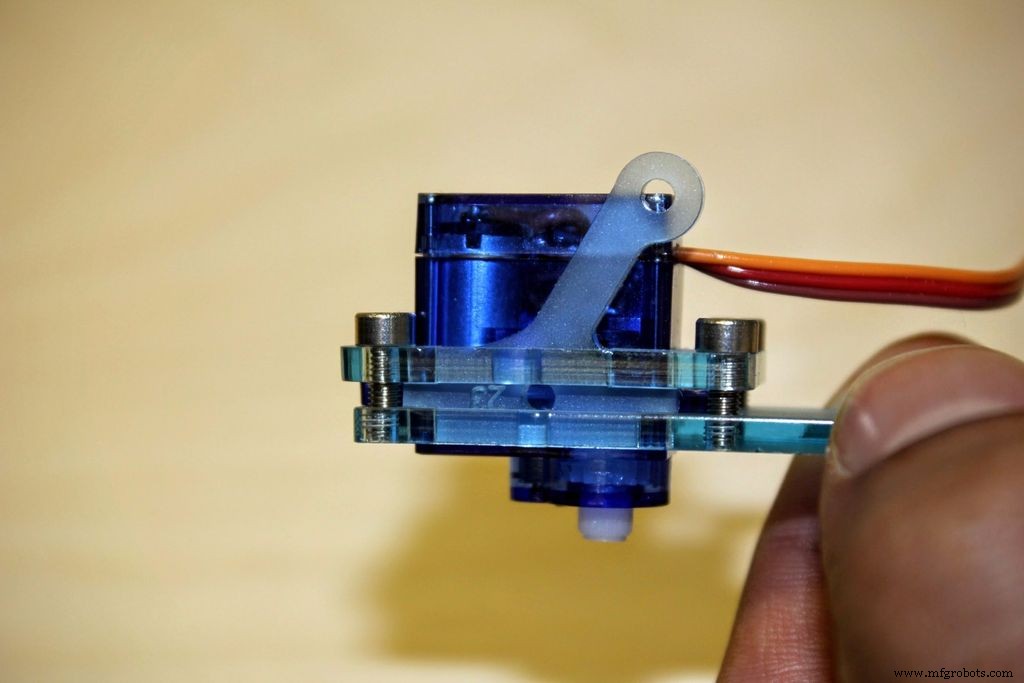
Ahora coloque la fijación del servo (la cosa blanca, se llaman cuernos) al brazo del servo (# 6) usando los tornillos afilados del paquete de fijación del servo. Estos se conectarán automáticamente a la bocina del servo de plástico blanco. Pueden ser un poco complicados, así que tenga cuidado aquí. Si está construyendo con un niño, entonces este es el momento en el que querrá participar.
Conecte la fijación del servo a su servo calibrado como se muestra, debe estar paralelo con el lado más largo de la parte # 4 y las líneas que dibujó anteriormente aún deben coincidir. Con el tornillo de máquina pequeño del paquete de servo, asegúrelo al servo, pero nuevamente, ¡no lo apriete demasiado!
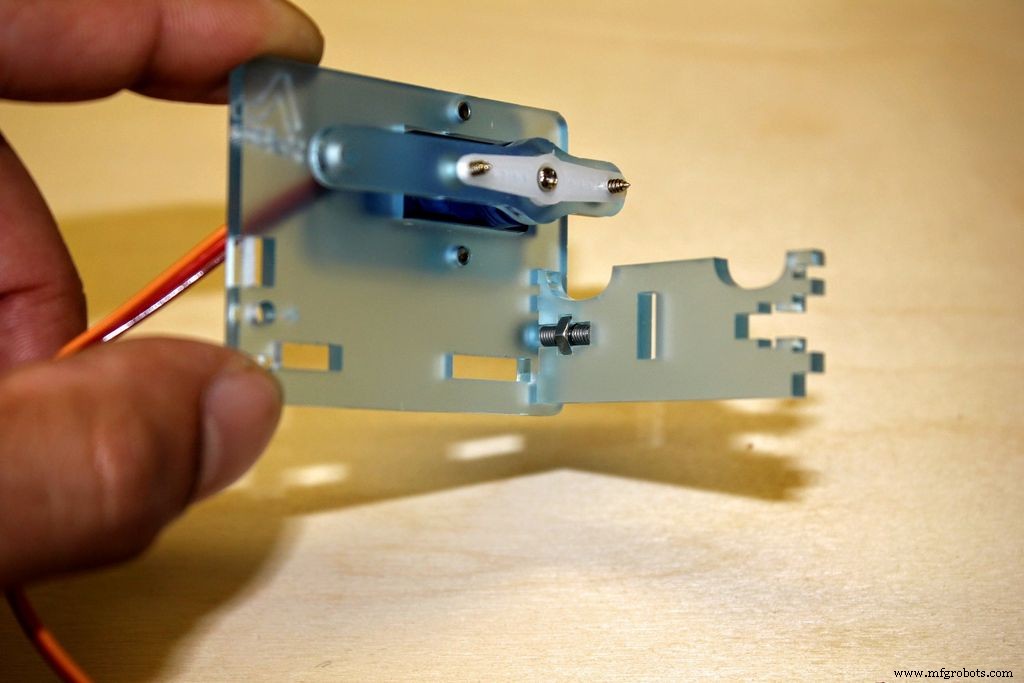
Paso 5:lado derecho
Las partes que queremos aquí son:
# 5, # 12, # 13, # 17, dos tornillos de 8 mm, un tornillo de 6 mm, el servo derecho y un paquete de fijaciones de servo.
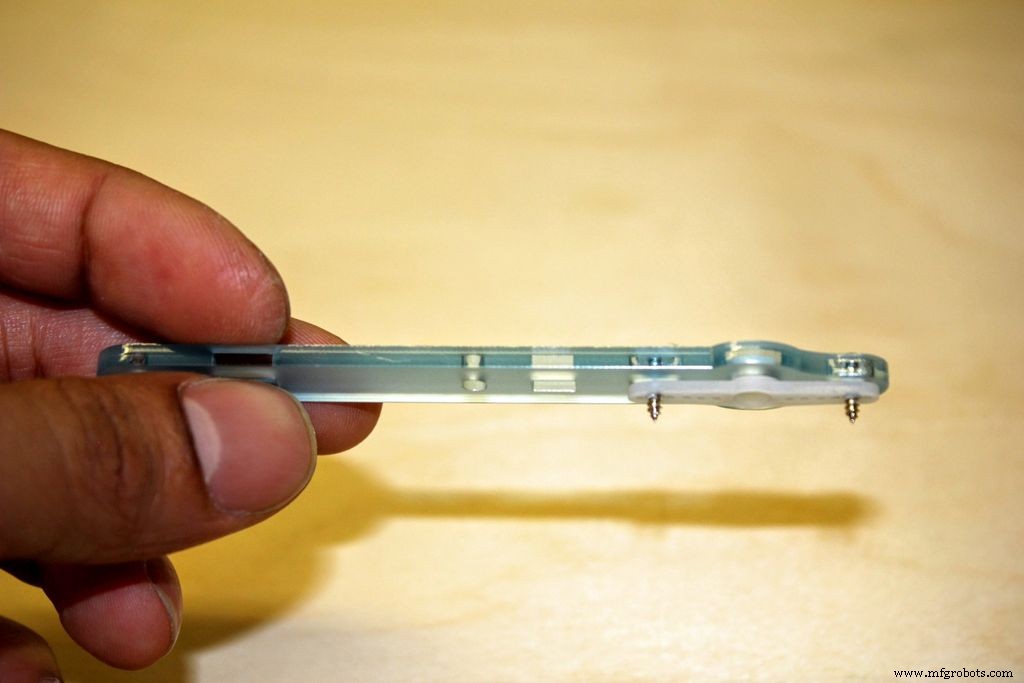
Pase el servo a través del collar y el cable a través del cable ordenado como antes, fije a la placa lateral con los tornillos de 8 mm, nuevamente teniendo cuidado de no romper la placa apretando demasiado. Conecte el cuerno del servo blanco al brazo del servo (# 13) usando los tornillos afilados como antes. Adjunte esto al servo con el brazo a 90 grados del lado más largo de la placa lateral. Nuevamente, las líneas negras que hiciste deberían alinearse.
Finalmente, en esta etapa, fije la pieza n. ° 17 a la placa lateral con el tornillo de 6 mm.
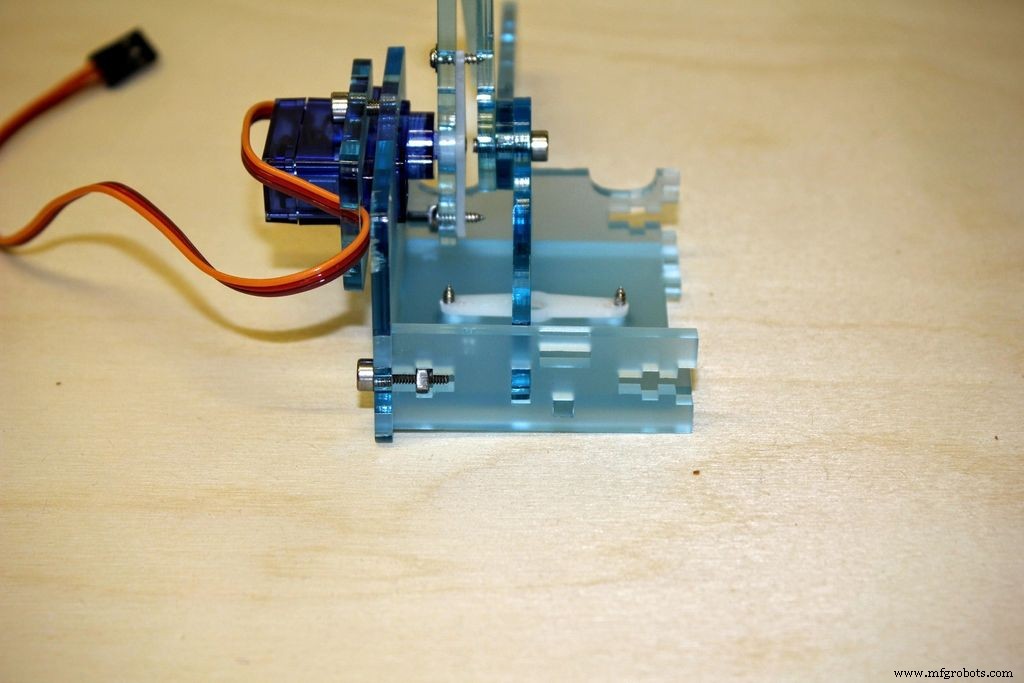
Paso 6:construye el medio
Estas partes unen las secciones izquierda y derecha. Los llamamos la base y el cerdo.
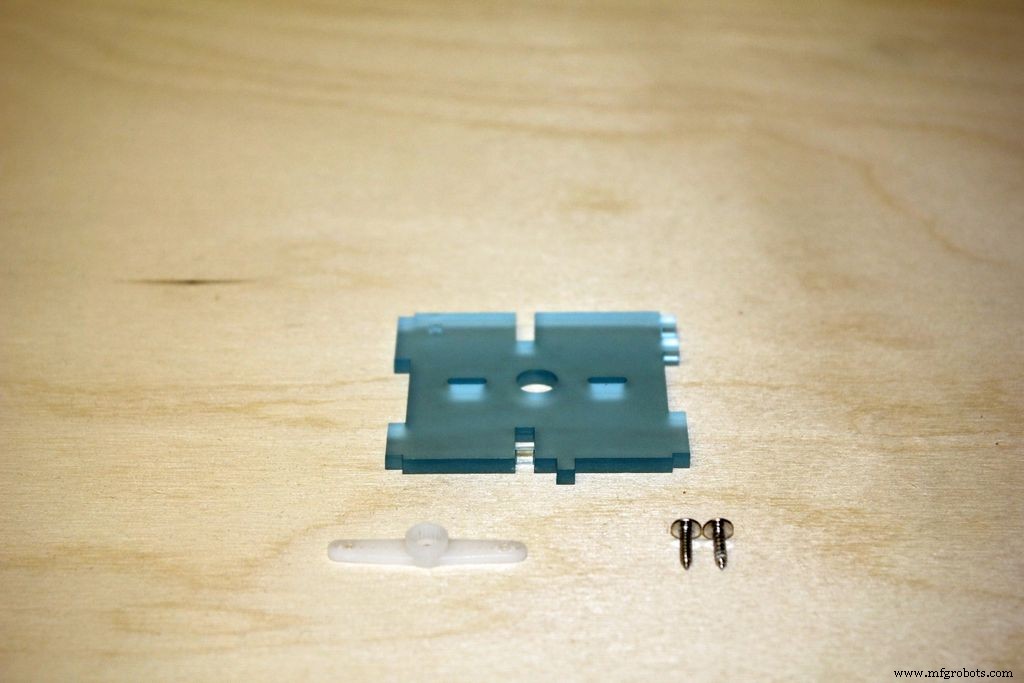
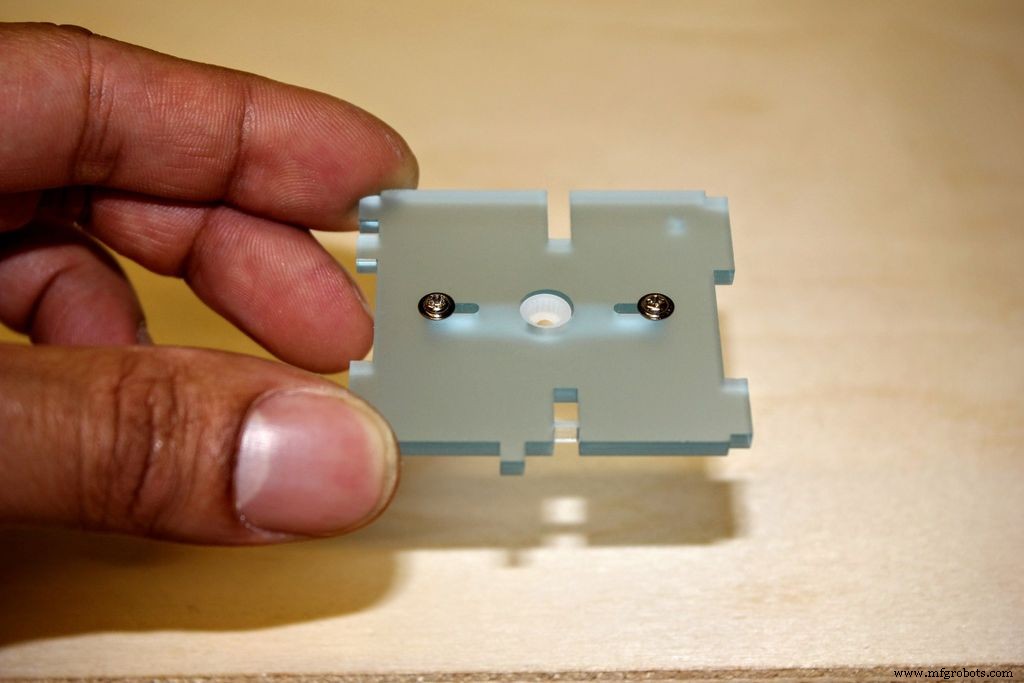
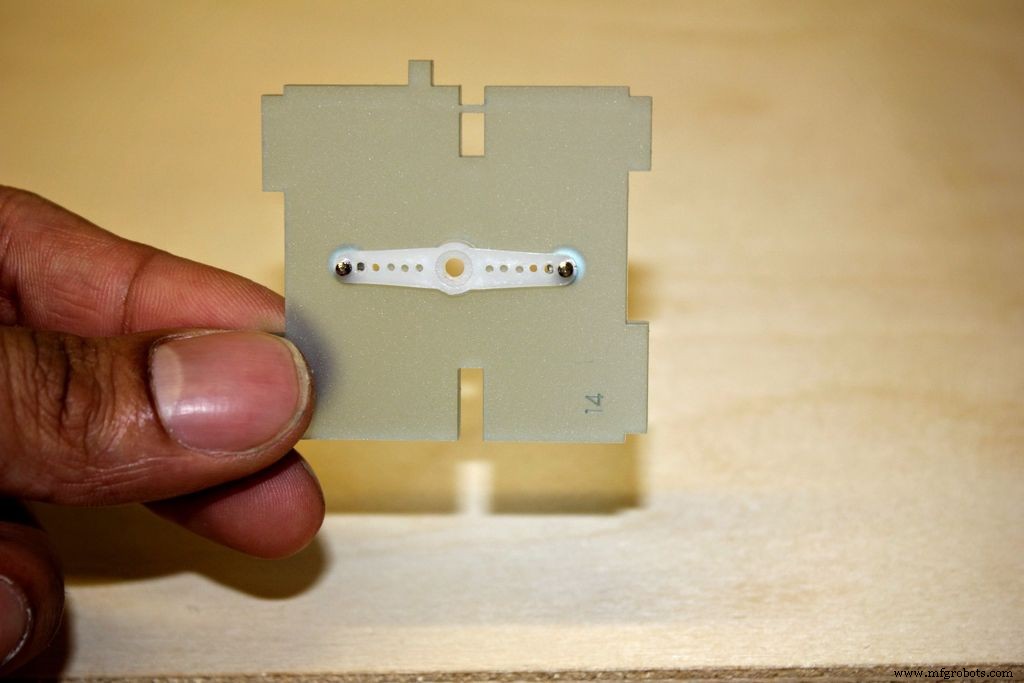
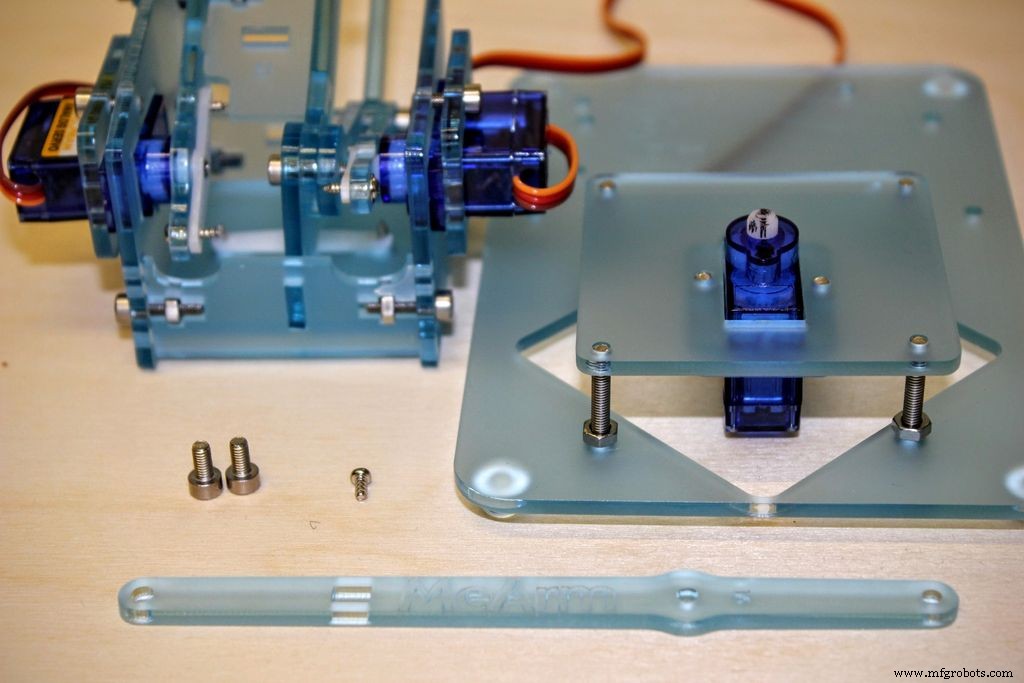
Para la base, busque la pieza n. ° 14 y un paquete de fijaciones de servo. Observando cuidadosamente la orientación, coloque la bocina del servo con los tornillos afilados. En esta etapa, ofrézcalo a la pieza del lado izquierdo para ver si tiene las cosas de la manera correcta. El Poka-yoking debería mostrarte el camino aquí.
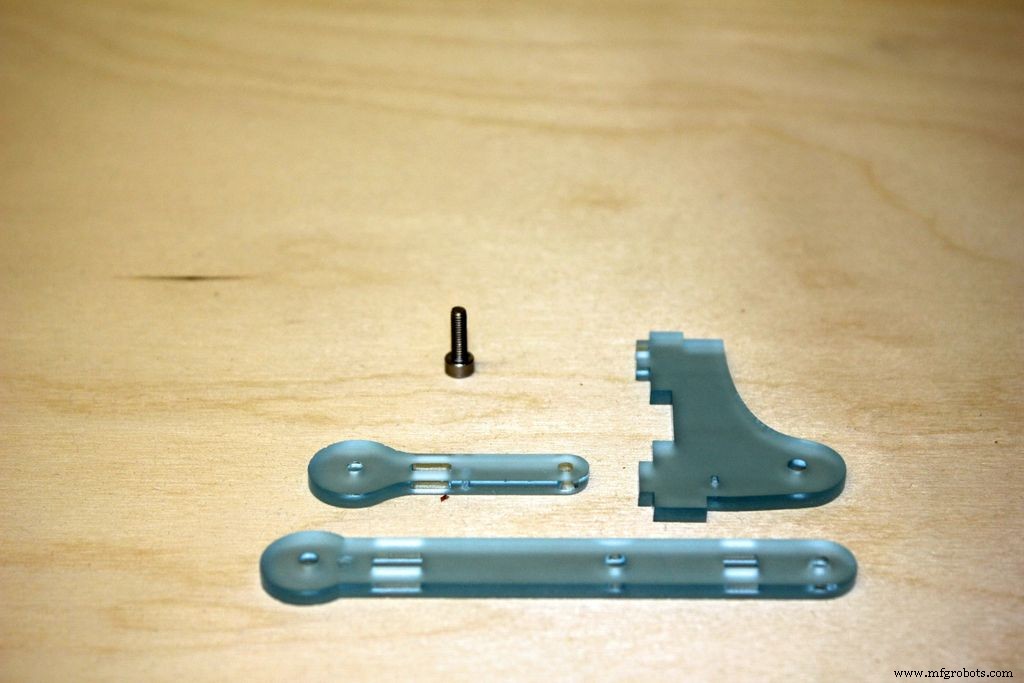
Para el cerdo, busque las piezas n. ° 8, n. ° 9, n. ° 10 y un tornillo de 10 mm. Atorníllelos en el orden que se muestra, que debe ser el n. ° 9, n. ° 10, n. ° 8 con el tornillo entrando desde el lado n. ° 8 y autorroscante en el n. ° 9. Lo siento, el orden de eso es confuso pero, honestamente, esta es la primera vez que lo escribo con los números. Es importante que estos se muevan alrededor del eje (el tornillo) en línea recta y que se muevan libremente. Si no se mueven en línea recta, desenrosque, sujételos y vuelva a atornillarlos para que queden todos tan paralelos como sea posible.
Paso 7:de izquierda a central
Ahora queremos empezar a juntar las partes izquierda y derecha usando las partes del medio.
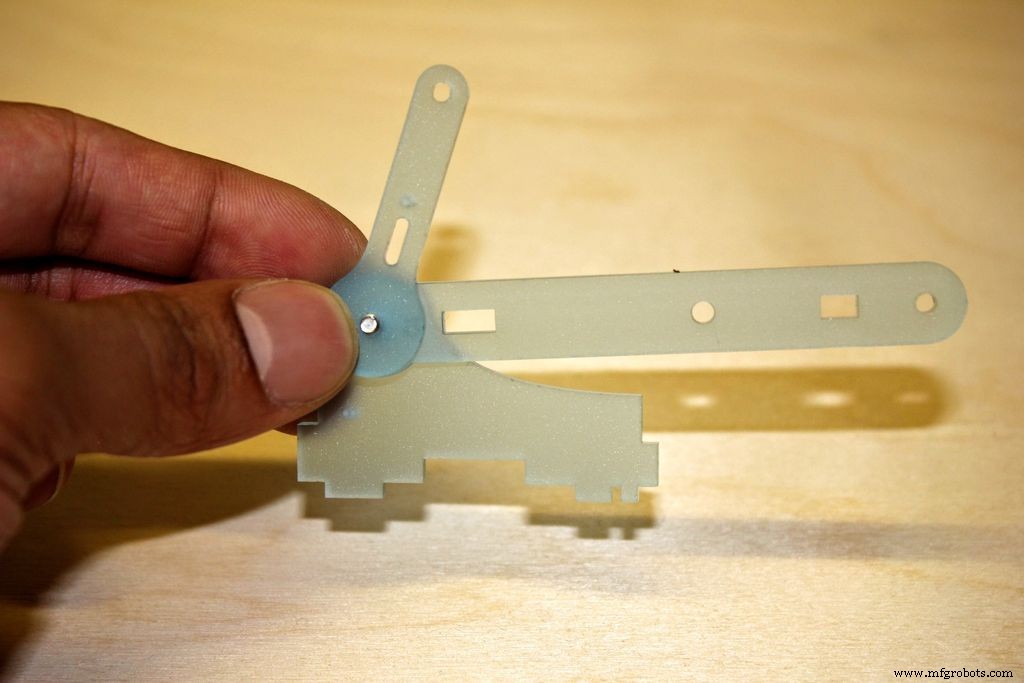
Primero, conecte el conjunto izquierdo a la pieza n. ° 7 con un tornillo y una tuerca de 12 mm. La forma más fácil de hacer esto es empujar el tornillo de 12 mm a través del conjunto izquierdo y colocar la tuerca media vuelta más o menos. Coloque la ranura en la parte # 7 sobre la tuerca y comience a apretar el tornillo. No apriete demasiado.
Debería ver la ranura para el cerdo en la parte # 7 (el puntal delantero). Coloque el cerdo en la ranura, luego inserte la parte de la base en las ranuras del conjunto de la izquierda y haga palanca hacia arriba para unir las ranuras del cerdo. Verifique dos veces la bocina del servo aquí, si la tiene al revés, se va a enfadar mucho más tarde.
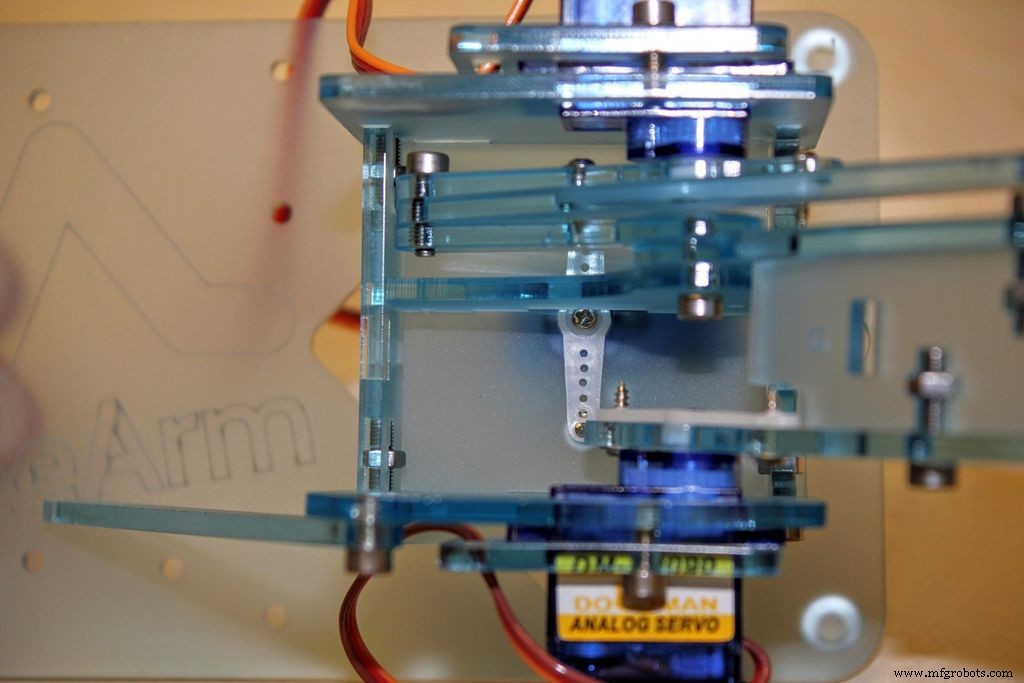
Con el cerdo en su lugar, puede colocar una palanca (n. ° 17), un espaciador opcional (n. ° 20) a la palanca del servo (n. ° 6) y la palanca en el cerdo (n. ° 9) junto con un tornillo de 12 mm o 10 mm, dependiendo de si necesitas el espaciador. Los Doman Servos que se ven aquí no requieren un espaciador, pero los últimos servos que usamos sí lo hacen. Hay repuestos en nuestro paquete para este propósito.
Ahora coloque el puntal trasero, pieza n. ° 11 con un tornillo y una tuerca de 12 mm como en el puntal delantero. Debe encajar en la parte trasera del cerdo y también en la perilla de la placa base. Apriete esto pero deje un poco de holgura ya que el ajuste será útil cuando esté acoplando la parte de la mano derecha.
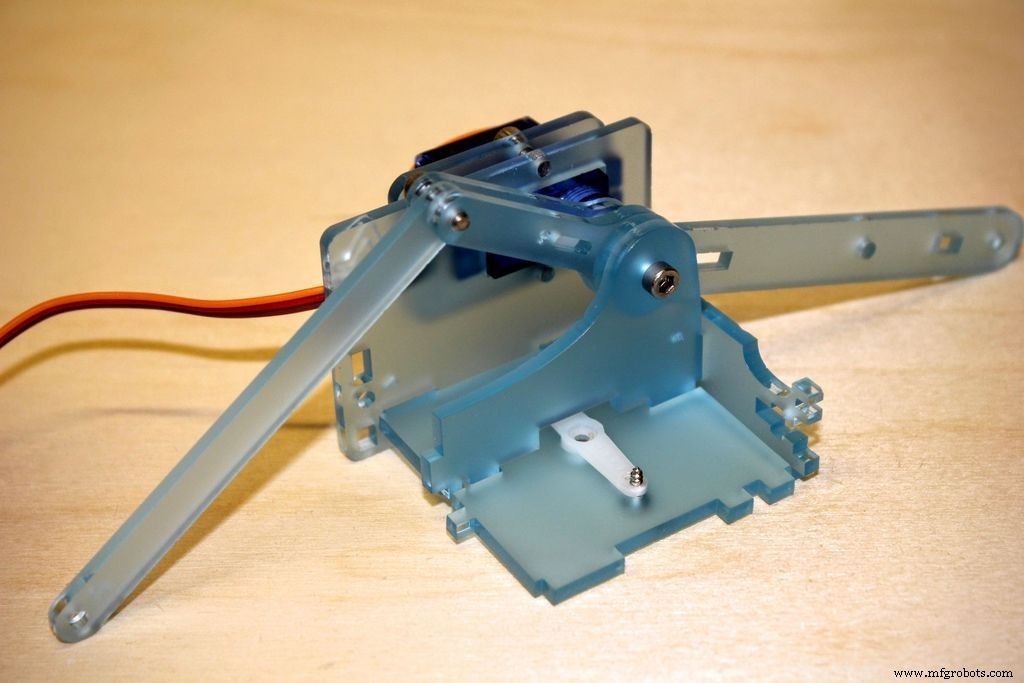
Paso 8:Adjuntar a la derecha
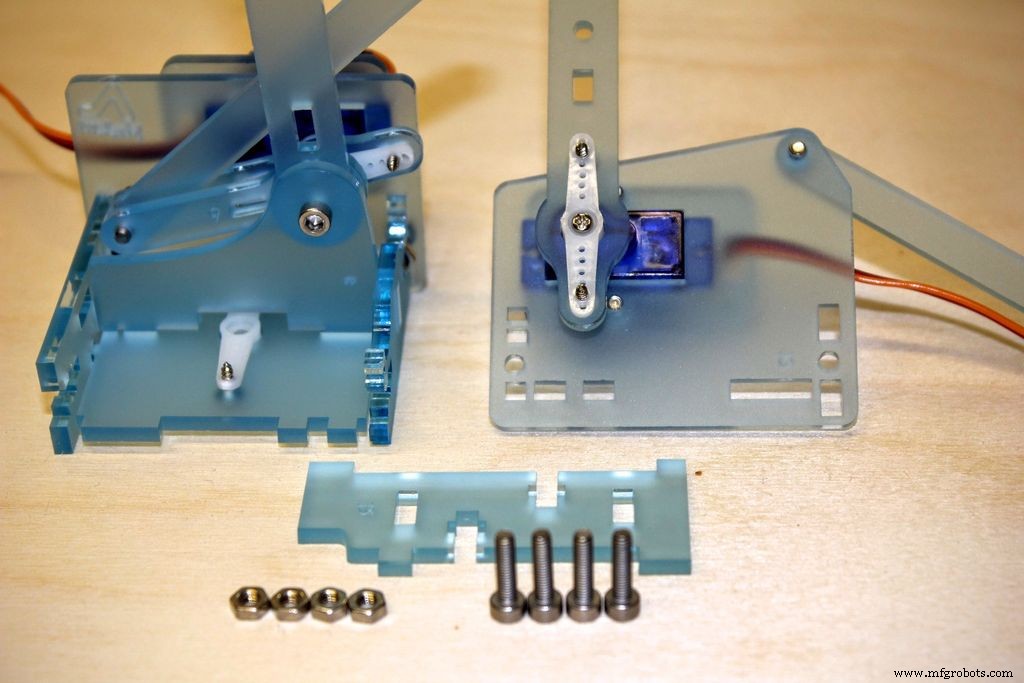
Ahora acoplamos el lado derecho a nuestro ensamblaje complejo, esto también implica colocar la pieza de correas n. ° 15.
Fije la pieza n. ° 15 a la pieza n. ° 10 (en el cerdo) con un tornillo y una tuerca de 12 mm.
Ahora viene uniendo el lado derecho al resto del conjunto. Puede colocar los tornillos y tuercas de 12 mm por el lado derecho antes de intentar acoplar las piezas, o puede dejarlas y colocarlas después. Aquí está intentando colocar varias piezas en las ranuras al mismo tiempo y puede ser complicado
Tómese su tiempo y tenga paciencia por favor. Este paso es el más complicado de toda la construcción. Una vez que hayas hecho esto, será más fácil, ¡te lo prometo!
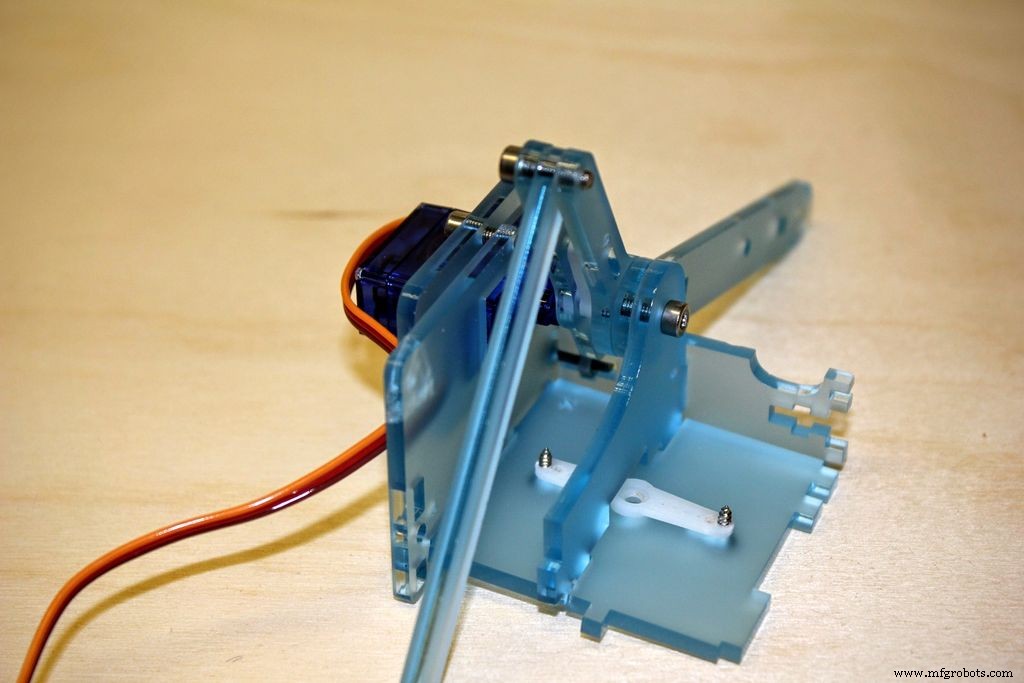
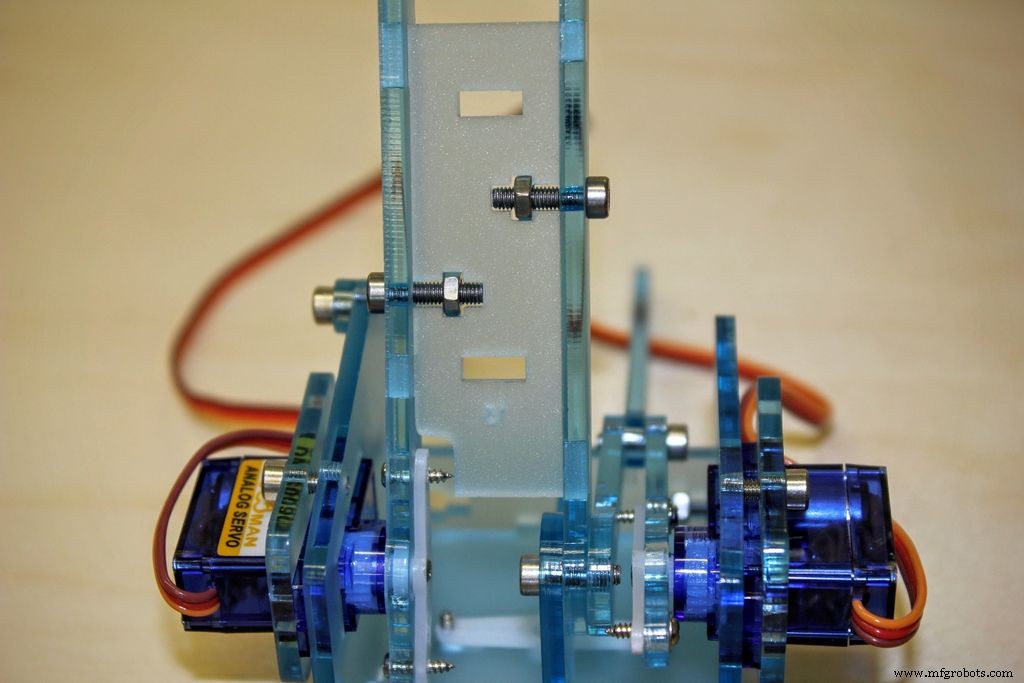
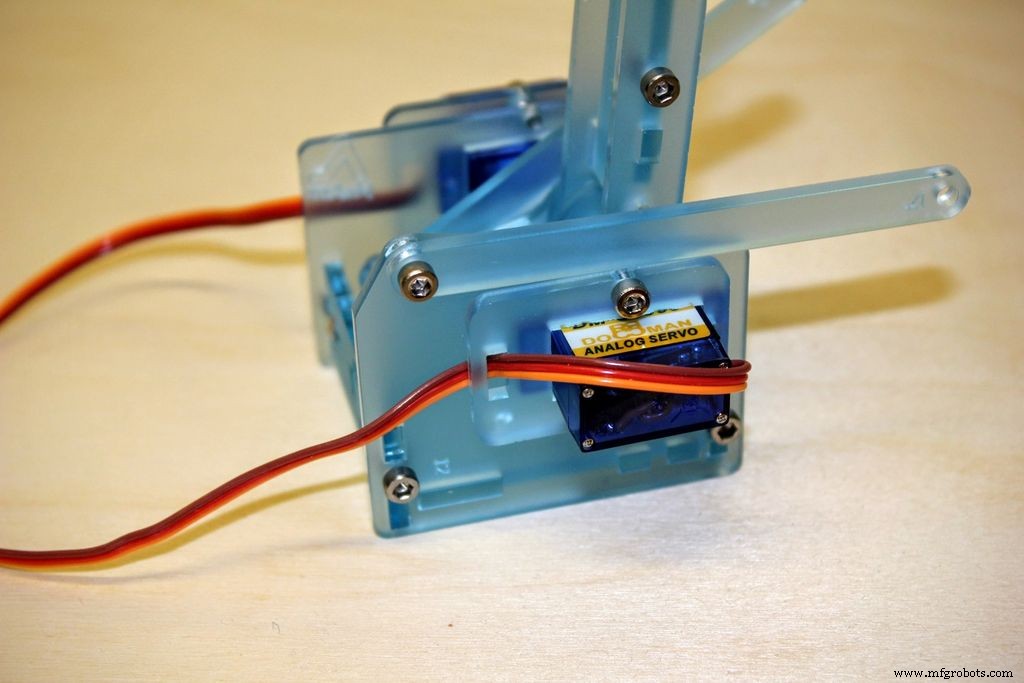
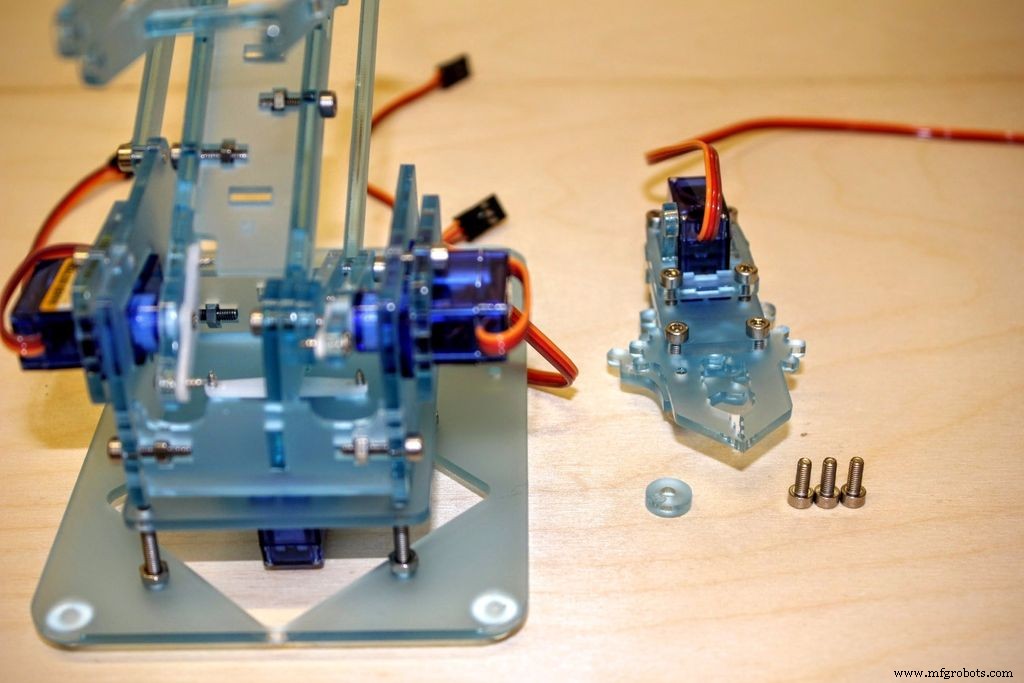
Paso 9:Adjuntar a la base, agregar el antebrazo izquierdo
Ahora que tenemos el hermoso ensamblaje central completo, podemos atornillarlo a la base.
Se trata de acoplar el cuerno del servo al servo central y asegurarlo con un tornillo.
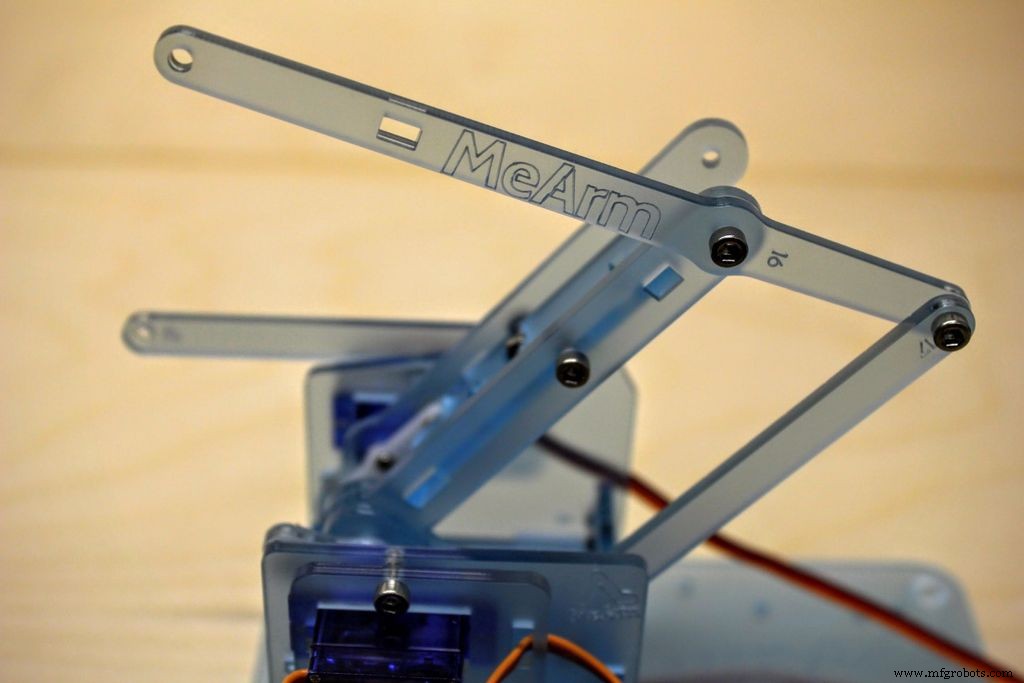
Ahora podemos agregar la pieza # 16 con el uso de dos tornillos de 6 mm. Esto se atornillará en la pieza n. ° 10 y en la n. ° 17. ¡Debería poder mover el servo fácilmente con esta nueva pieza!
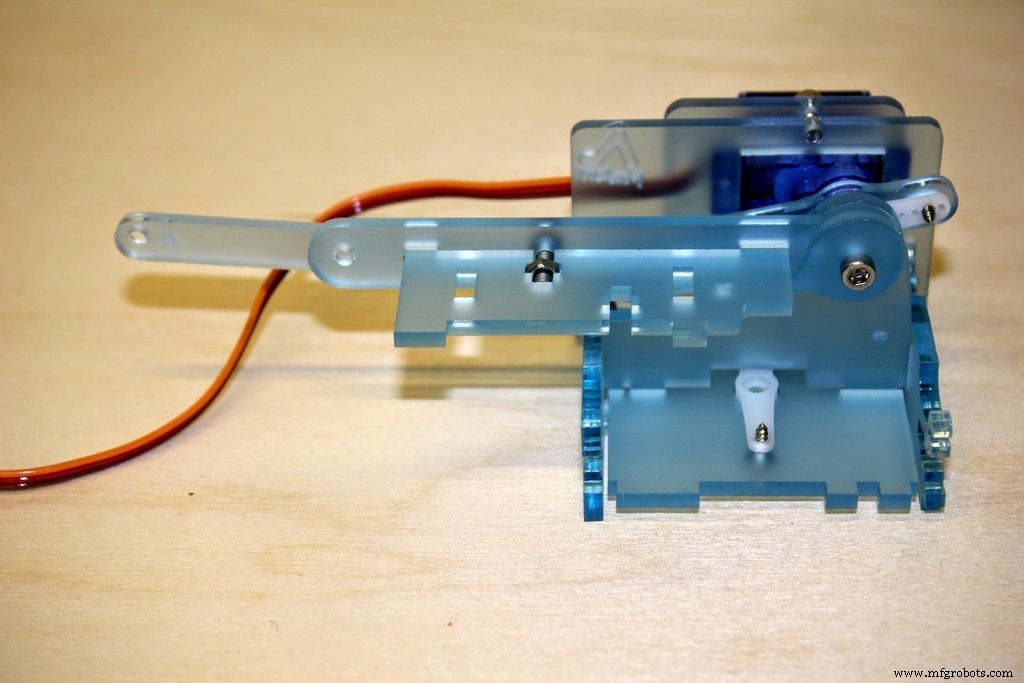
Paso 10:antebrazo derecho


A continuación, construimos el antebrazo derecho.
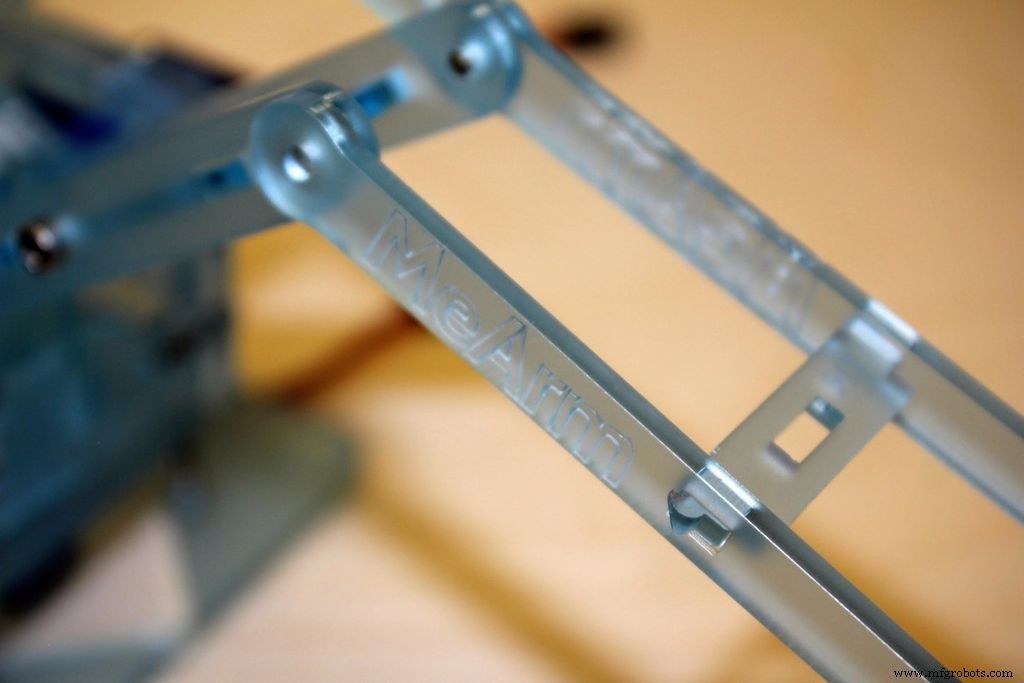
Lo primero que debe hacer es enganchar la parte n. ° 18 en la parte del antebrazo izquierdo que acaba de unir y luego en el antebrazo derecho, que llamaremos parte n. ° 31, ya que parece que no está numerada.
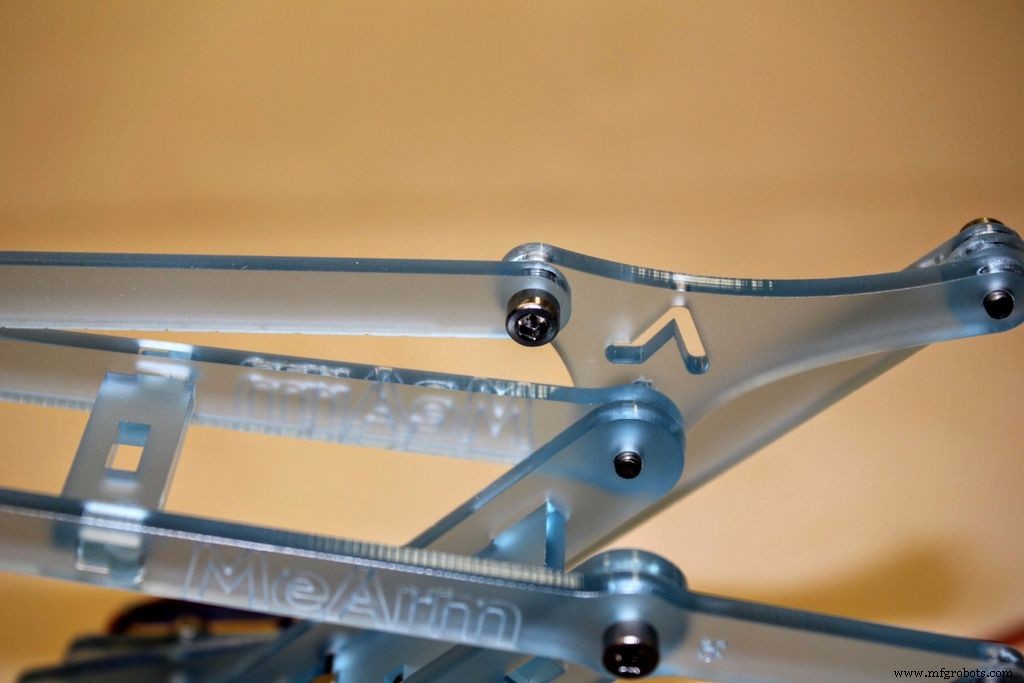
Conecte la parte triangular n. ° 19 a la parte n. ° 31 y a la parte n. ° 13 (la broca que está unida al servo) con un tornillo de 10 mm. No apriete demasiado, ya que necesitamos que todas estas piezas se muevan libremente.
Fije la parte posterior de la pieza n. ° 19 a la pieza n. ° 17 unida a la placa del lado derecho, use un tornillo de 10 mm y un espaciador (n. ° 20) en el medio.
Luego, coloque la pieza final n. ° 17 en el frente interior de la pieza n. ° 19 con un tornillo de 6 mm.
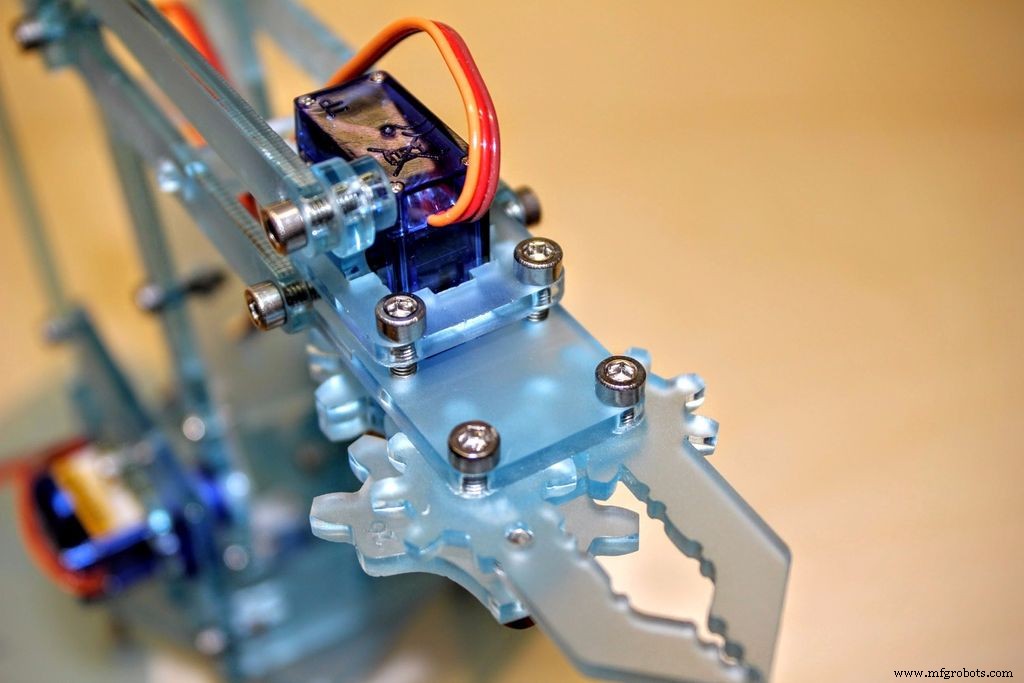
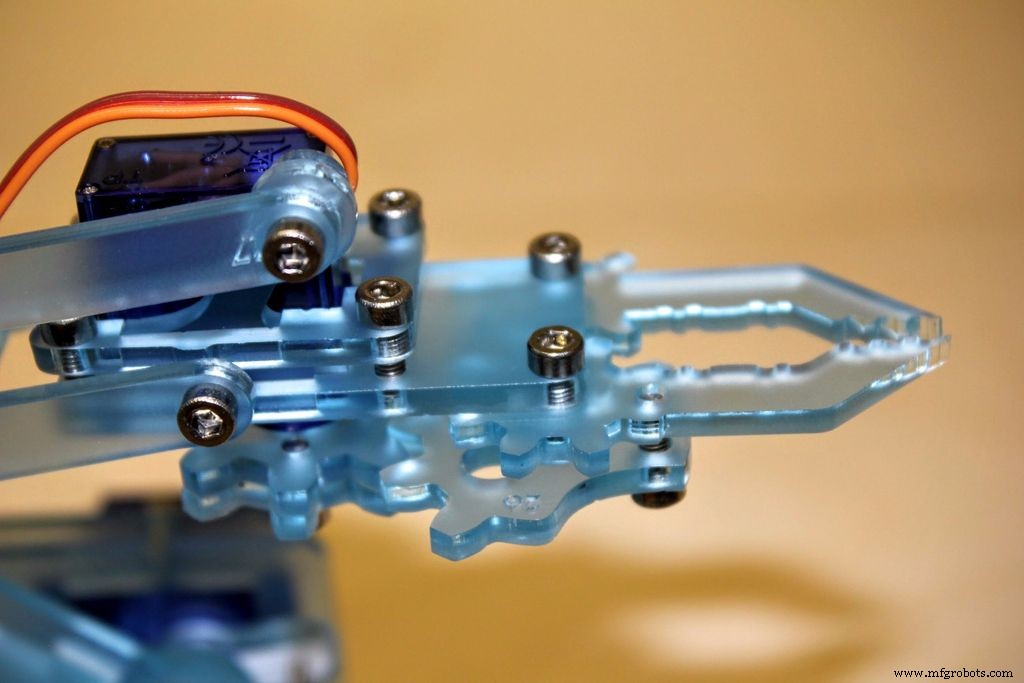
Paso 11:¡Construye la garra!
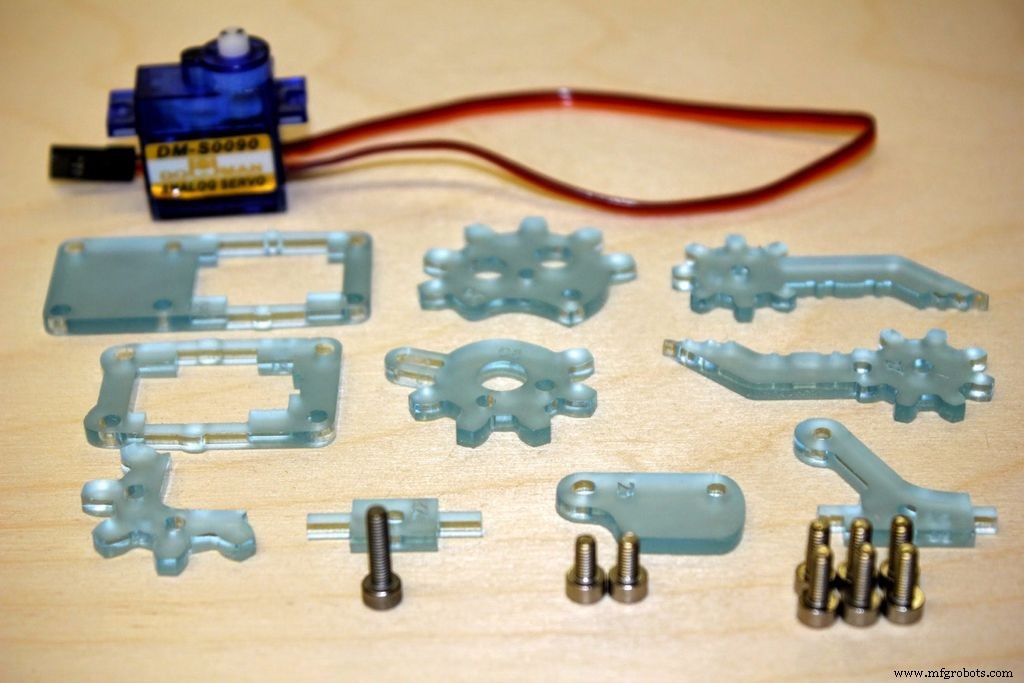
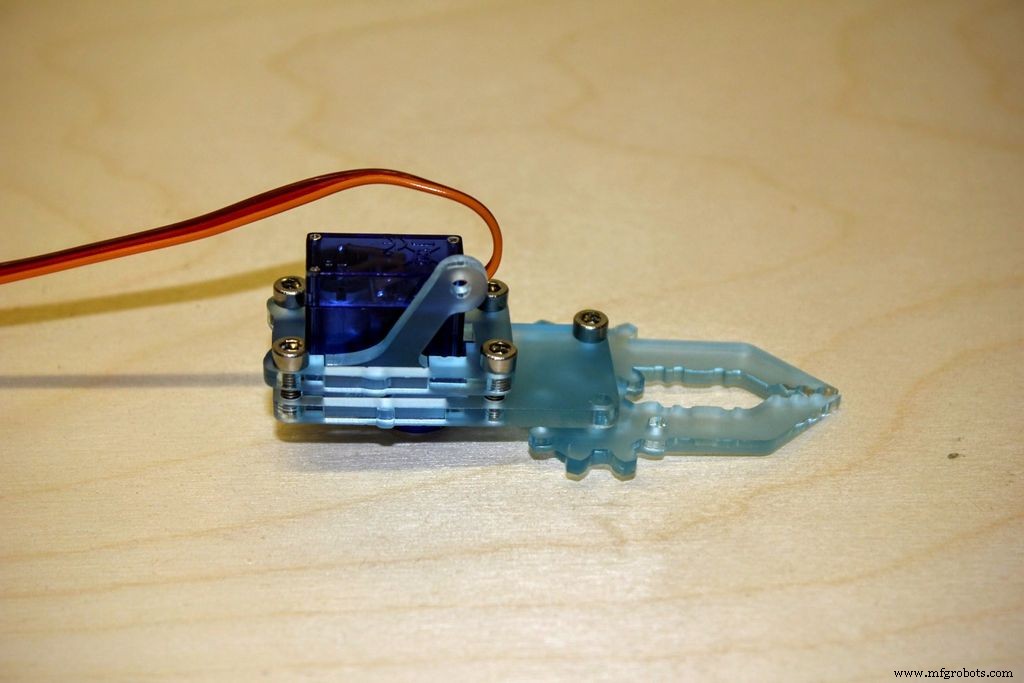
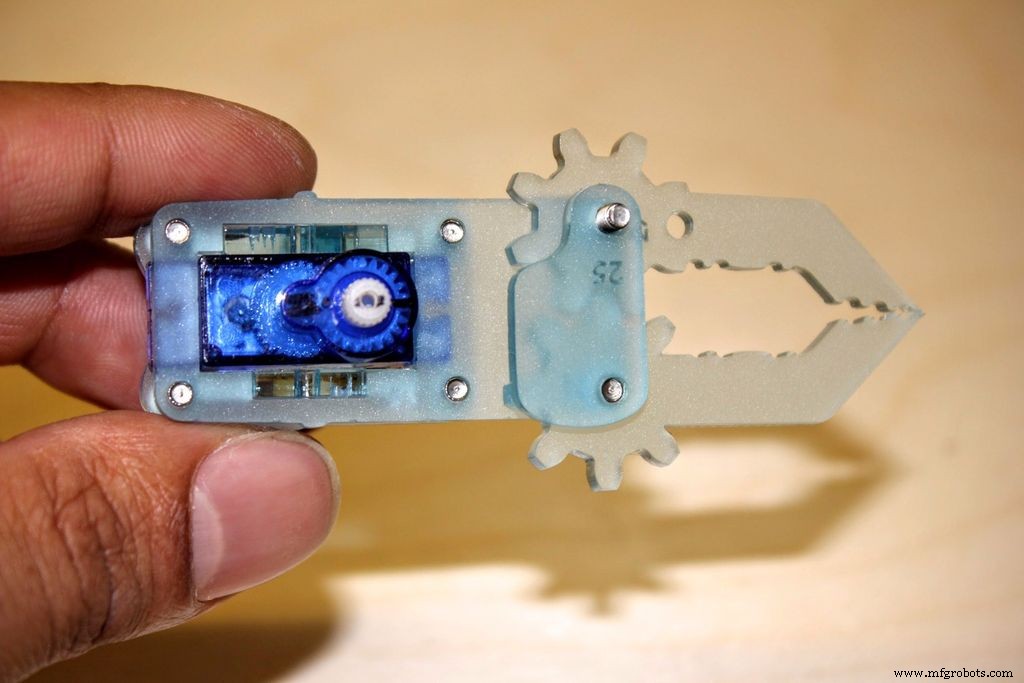
Pase el servo por el collar restante, # 21. Inserte las partes n. ° 22 y n. ° 23 en las ranuras laterales hechas por el servo y la parte n. ° 21 y luego, usando la parte n. ° 24, asegúrelas con cuatro tuercas de 8 mm. Nuevamente, ten cuidado, ya casi llegamos, no querrás romper nada.
Las siguientes partes estarán un poco desaseadas hasta que el último tornillo esté en su lugar, así que no se preocupe si se le cae algo ahora. Asegure la pieza n. ° 28 a través del orificio izquierdo del conjunto de la cabeza con un tornillo de 8 mm en la pieza n. ° 25. Luego, engrane los engranajes en la pieza n. ° 27 y coloque un tornillo de 12 mm a través de él, el conjunto de la cabeza y la pieza n. ° 25. Esto no será seguro todavía, pero lo mantiene unido.
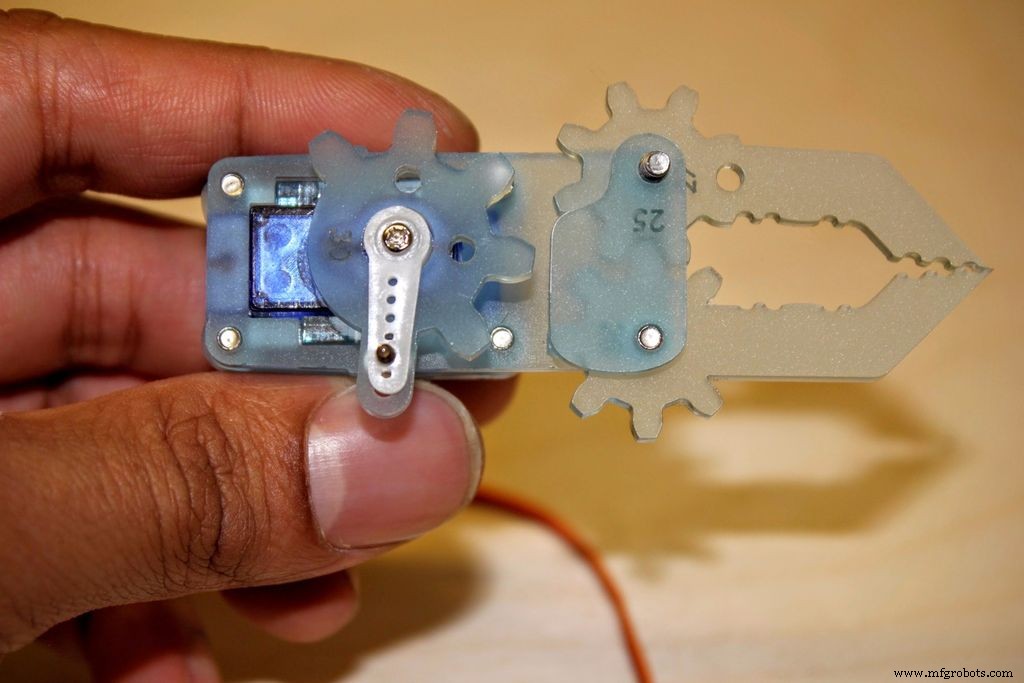
Conecte una bocina de servo a la pieza n. ° 30 y fíjela al servo con el tornillo para metales. Fije el n. ° 29 al n. ° 30 con dos tornillos de 6 mm.
Ahora puede colocar el n. ° 26 en el tornillo suelto de 12 mm y fijarlo en el orificio adicional de la pieza n. ° 27 con un tornillo de 8 mm.
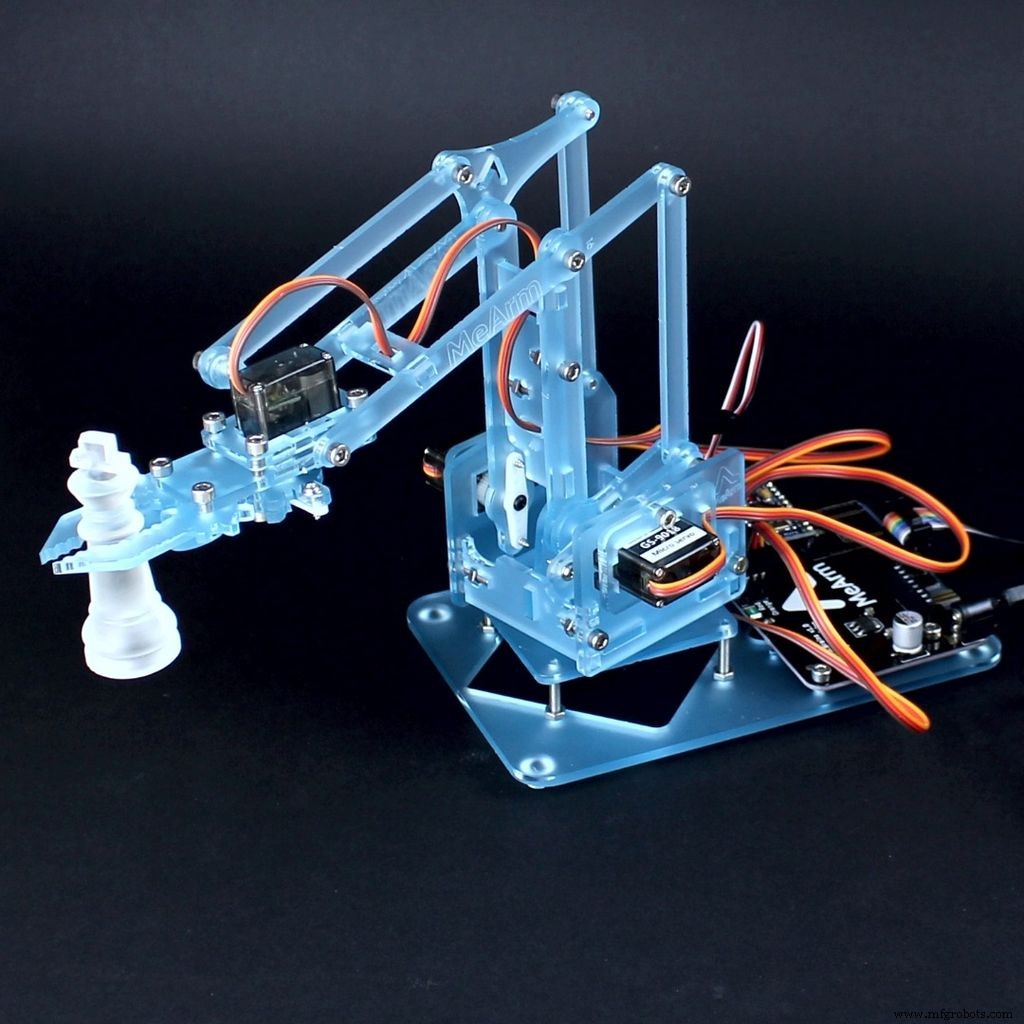
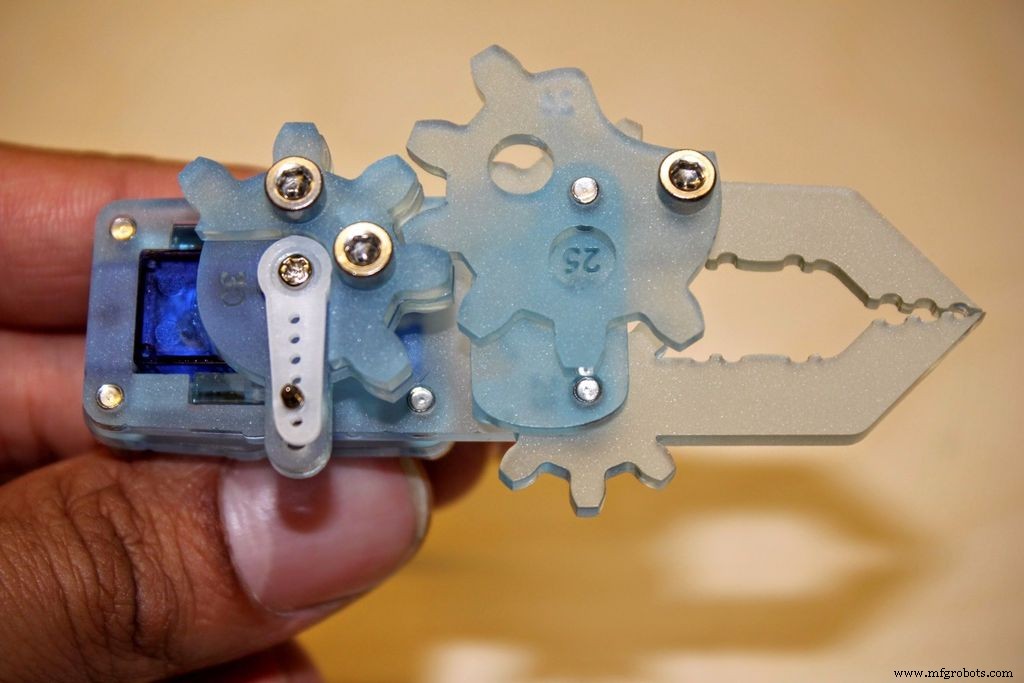
Paso 12:Agrega la cabeza
La última parte es colocar la cabeza.
Esto se asegura con dos tornillos de 8 mm a través de los antebrazos en las partes n. ° 22 y n. ° 23 de la cabeza. Puede que sea más fácil aflojar los tornillos de 8 mm de la abrazadera del servo del cabezal.
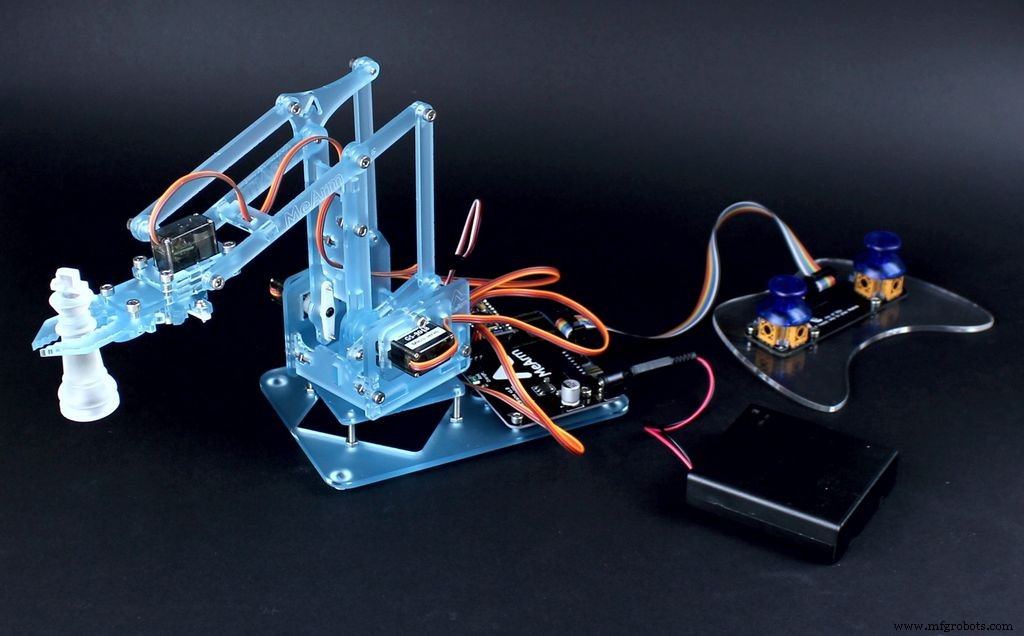
¡Ahora enciende y juega!
Paso 13:resolución de problemas
Esta sección se completará con el tiempo con problemas comunes. Si tiene uno, avísenos y lo agregaremos.
El brazo del servo izquierdo parece atascado. Por lo general, esto se debe a una articulación rígida. El accesorio de montaje de la cabeza es el que la gente olvida.
Código
- Archivo sin título
Archivo sin título Arduino
#includeServo medio, izquierdo, derecho, garra; // crea 4 "objetos servo" void setup () {Serial.begin (9600); fijación.medio (11); // conecta el servo en el pin 11 al objeto del medio left.attach (10); // conecta el servo en el pin 10 al objeto izquierdo right.attach (9); // conecta el servo en el pin 9 al objeto derecho claw.attach (6); // conecta el servo en el pin 6 al objeto garra} void loop () {middle.write (90); // establece la posición del servo de acuerdo con el valor (grados) left.write (90); // hace lo mismo right.write (90); // y de nuevo claw.write (25); // sí, lo has adivinado delay (300); // no actualiza constantemente los servos que pueden freírlos}
Codebender
https://codebender.cc/sketch:148456Piezas y carcasas personalizadas
Proceso de manufactura
- Robot de pórtico:automatice sus aplicaciones más grandes
- Documento técnico:Cómo encontrar el potencial de su robot
- La importancia de la seguridad de los robots en la planta de su fábrica
- Construyendo su propio brazo robótico:¿Debería tomar el riesgo?
- Robot SCARA de doble brazo
- Brazo robótico controlado a través de Ethernet
- Littlearm 2C:Construya un brazo robótico Arduino impreso en 3D
- Controlador de brazo robótico MK2 Plus
- Seminario web:Automatice su proceso con Techman Robot
- Centro de torneado equipado con brazo robótico
- Robot combina brazo robótico colaborativo con plataforma móvil