


Motor paso a paso frente a motor de CC:¿en qué se diferencian
Los motores eléctricos son componentes esenciales para convertir la energía eléctrica en energía mecánica. Sin embargo, aunque todos los motores realizan la misma función, elegir el correcto es útil para brindar el par máximo. Por lo tanto, en este artículo, distinguiremos entre el motor paso a paso y el motor de CC. Además, identificaremos las propiedades críticas de los servomotores.
Motor paso a paso
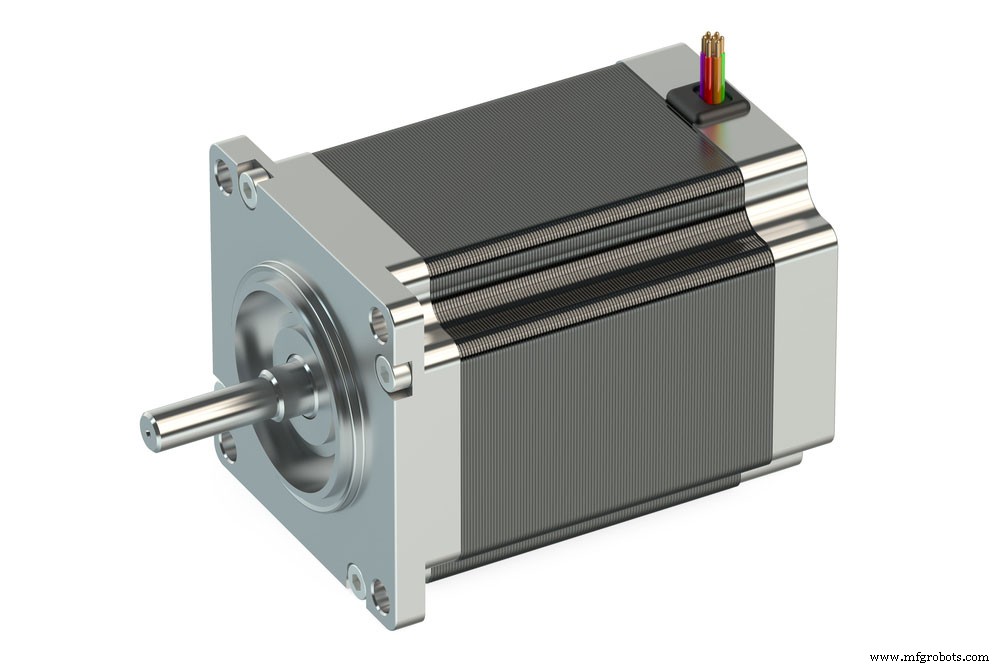
Figura 1:Un motor paso a paso
Definición
Principalmente, es un motor de CC sin escobillas que gira en pasos discretos.
Además, con los pasos controlados por computadora, es posible realizar un posicionamiento y un control de velocidad extremadamente precisos. Por lo tanto, los motores paso a paso son populares en los usos de control de movimiento de precisión.
Componente
Cuenta con múltiples electroimanes dentados que rodean un engranaje central. Esta disposición es útil para definir la posición. Además, un motor paso a paso de imán permanente utiliza energía de corriente continua. Sin embargo, carece de las escobillas y el conmutador mecánico, sinónimo de los motores de corriente continua. Por lo tanto, es un motor de CC sin escobillas.
Principio de funcionamiento
El motor cuenta con un sistema de control responsable de enviar pulsos eléctricos a un conductor. Posteriormente, el conductor descifra los impulsos. A su vez, transmite un voltaje proporcional al motor.
A continuación, el motor girará en incrementos angulares fijos. Es de donde deriva el nombre de motor paso a paso. Además, tenga en cuenta que una corriente alterna controla la polaridad de las bobinas.
Ventajas y limitaciones
Las ventajas del motor paso a paso incluyen lo siguiente:

Fig. 2:una impresora 3D de metal
- Primero, son útiles para facilitar aplicaciones de posicionamiento preciso, como en trazadores X, Y e impresoras 3D.
- Además, permiten un control preciso de la velocidad de rotación.
- En tercer lugar, cuentan con un par motor bajo a velocidades bajas.
- Por último, son fáciles de controlar.
Sus limitaciones fundamentales incluyen
- Los motores tienen baja eficiencia. Tomarán la mayor cantidad de corriente cuando no tengan carga.
- Además, cuando la velocidad del motor es alta, su par es significativamente bajo en comparación con cuando funciona a bajas velocidades.
- Y la mayoría carece de retroalimentación integral sobre la posición. Son relativamente ruidosos durante el uso.
- Por último, cuando funcionan con mucha carga, pueden omitir algunos pasos.
Aplicaciones
- impresoras 3D
- Aplicaciones de imágenes médicas
- Cámaras de seguridad
- Robótica
- Fresadoras CNC
Servomotores

Fig. 3:Ilustración 3D de un servomotor
Definición
Pertenece a los tipos de motores de corriente continua. No obstante, este motor síncrono no funciona continuamente durante un período prolongado.
Componente
Principalmente, este motor se basa en un sistema de retroalimentación para detectar la diferencia entre la velocidad real y la deseada. Por lo tanto, la retroalimentación facilita el ajuste de la salida al corregir una desviación de la posición deseada. Es útil para mejorar el posicionamiento preciso.
Hay dos tipos de servos, a saber:
Servos de motor de rotación continua
Pueden girar continuamente en sentido horario o antihorario. Además, pueden moverse a diferentes rangos de velocidades guiados por la señal de comando. Por lo tanto, son útiles para una gama más amplia de aplicaciones que los motores posicionales.
Servos de rotación posicional
Son útiles en proyectos de pequeña escala para lograr un posicionamiento preciso moderado. Además, giran en un ángulo de 180 grados y no ayudan en la rotación continua ni en el control de la velocidad.
Principio de funcionamiento

Figura 4:un servomotor
El diseño interior del motor presenta una disposición única de los engranajes, útil para mitigar la alta velocidad de los motores internos. Simultáneamente, hay un aumento significativo en la salida de torque.
Por lo tanto, el diseño del engranaje de los servos y la velocidad de rotación son imprescindibles para generar un alto par. También cabe destacar que el servo cuenta con un microcontrolador útil para corregir la señal de error. Estas señales de control ayudan a mover el rotor a la posición final.
Motor paso a paso frente a motor de CC:ventajas y limitaciones
Méritos de los servomotores
- Tienen un alto par de salida cuando giran a altas velocidades. Principalmente, esto se debe a su sistema de control de retroalimentación de circuito cerrado, que es mejor que el sistema de circuito abierto del motor paso a paso.
- Además, están disponibles en una amplia gama de clasificaciones de torque y tamaños
- Por último, son relativamente baratos ya que algunos están hechos de plástico, lo que también los hace livianos.
Desventajas de los servomotores
- Los motores posicionales tienen una limitación de rotación. Solo pueden girar en un ángulo de 180 grados.
- Además, son sinónimos de espasmos durante el control posicional. Principalmente, se debe al mecanismo de retroalimentación que busca rectificar cualquier cambio de la posición deseada.
Aplicaciones
- Tecnología de ascensores y robótica
- Telescopios y cámaras
- Aplicaciones de control industrial
Motor paso a paso frente a motor de CC:motores de CC

Fig. 5:Numerosos motores de CC
Definición
Son dispositivos con bobina electromagnética y conductores cuyas interacciones transforman la energía eléctrica en energía mecánica. Los dos tipos comunes de motores de CC incluyen motores sin escobillas y motores con escobillas. Además, hay diferentes tamaños de motores de CC.
Componente
Cabe destacar que el nombre cepillado proviene de los dos cepillos metálicos estacionarios que proporcionan corriente de bobinado al motor. Los otros componentes principales incluyen el estator estático y la armadura giratoria
Motor paso a paso frente a motor de CC:principio de funcionamiento
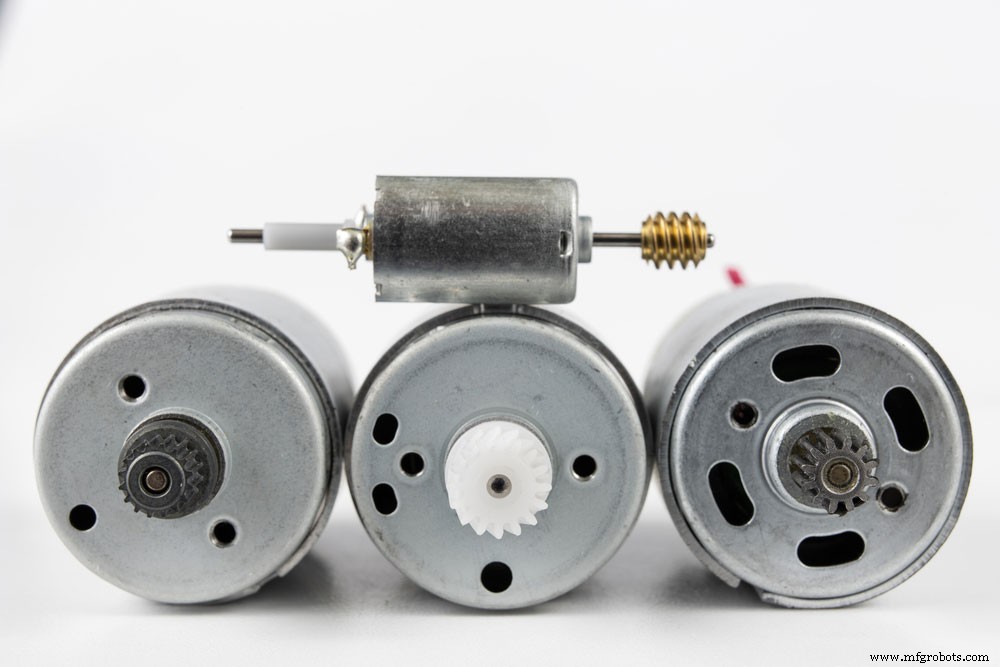
Figura 6:Motores de CC
El estator genera el campo magnético giratorio, que provoca la rotación de la armadura. Además, un par de imanes es útil para envolver las bobinas electromagnéticas al rodear las bobinas. Así, cuando la corriente del devanado del alambre pasa a través de un campo magnético, induce una fuerza. A su vez, esto inicia la rotación de las bobinas.
Motor paso a paso frente a motor de CC:ventajas y limitaciones de los motores de CC con escobillas
Ventajas
- Son fáciles de controlar ya que todo lo que se necesita es la aplicación de un voltaje.
- En segundo lugar, ofrecen un alto rendimiento de toque a velocidades relativamente bajas. Adicionalmente, su generación de potencia mecánica es alta con una eficiencia de aproximadamente 75 a 80 %.
- Son relativamente baratos y, por lo tanto, asequibles.
Desventajas
- Son propensos al ruido electromagnético y al ruido físico durante la rotación.
- Además, los motores requieren un mantenimiento regular ya que la tasa de rotura y desgaste de las escobillas es significativamente alta.
Aplicaciones
- Taladros inalámbricos
- Aplicaciones industriales
- Vibradores para teléfonos móviles
- Ventiladores de mano
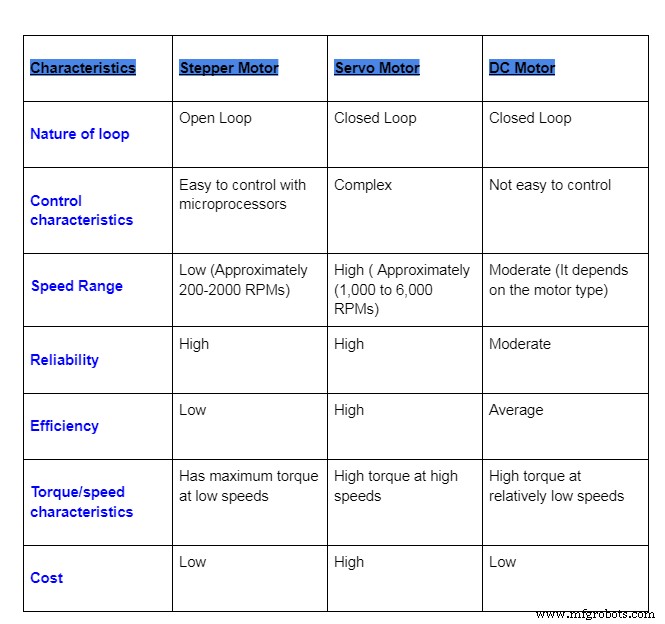
La diferencia entre motor paso a paso, servomotor y motor de CC
Conclusión
En pocas palabras, estos tres motores se adaptan a diferentes funciones como hemos elaborado. Ahora tiene todas las diferencias clave entre los tres tipos de motores. Sin embargo, si desea hacer alguna aclaración adicional, comuníquese con nosotros.
Tecnología Industrial
- Potenciómetro como reóstato
- Motor de inducción
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Prototipo de Raspoulette
- Motores eléctricos sobredimensionados:¿Deberían ser reemplazados?
- Cómo comprobar un motor de CC
- ¿Qué es un planificador de mantenimiento?
- ¿Qué es un motor lineal?
- ¿Qué es un servomotor?
- ¿Qué es la fabricación por contrato?