


Proyecto de brazo robótico:una guía paso a paso
¿Tiene dificultades con tareas que necesitan un alto grado de precisión? ¿O se trata de operaciones consistentes y repetitivas que requieren alta precisión y rendimiento? Entonces, necesitas un proyecto de brazo robótico.
Además, es un dispositivo PCB electrónico confiable que puede realizar una amplia gama de operaciones. Por lo tanto, encontrará el brazo robótico en diferentes industrias como:
- Acceso a la máquina
- Laboratorios
- Automatización industrial
- Fabricación
Por lo tanto, será una idea brillante emprender el proyecto del brazo robótico. Sin duda, parece complicado al principio pero, con todos los materiales en su lugar, la tarea será más sencilla. En este artículo, le daremos detalles sobre cómo construir un brazo robótico.
¡Pongámonos a trabajar!
¿Qué es un brazo robótico?

Brazo robótico industrial
Un brazo robótico se refiere a una herramienta mecánica que puede automatizar a través de un software especial. Y puede instalar el software especial en un microcontrolador en particular. La mayoría de las veces, este dispositivo puede ser parte de un robot similar a un humano o un dispositivo independiente.
Además, el tipo de tarea que realiza depende del movimiento de la articulación del brazo. Por ejemplo, puede ver un brazo robótico y un brazo de agarre robótico con articulaciones separadas que pueden moverse en una dirección recta.
¿Cómo se hace un brazo robótico simple?
Le mostraremos cómo hacer un brazo robótico simple que recordará la secuencia de movimientos y juegos. Dicho esto, echemos un vistazo a los componentes que necesita para el proyecto:
- Protoboard
Una placa de pruebas
- Piezas de madera
- IDE de Arduino instalado
- Servomotores (5)
Conjunto de Servomotores
- Arduino UNO
Arduino UNO
Fuente:Wikimedia Commons
- Potenciómetros (5)
Juego de potenciómetros
Fuente:Wikimedia Commons
- Adaptador (5V 2A)
- Tablero de lienzo (tamaño A4)
- Cables de señal

Cables de señal
Con esto en mente, puede proceder a construir su proyecto de brazo robótico simple siguiendo los siguientes pasos:
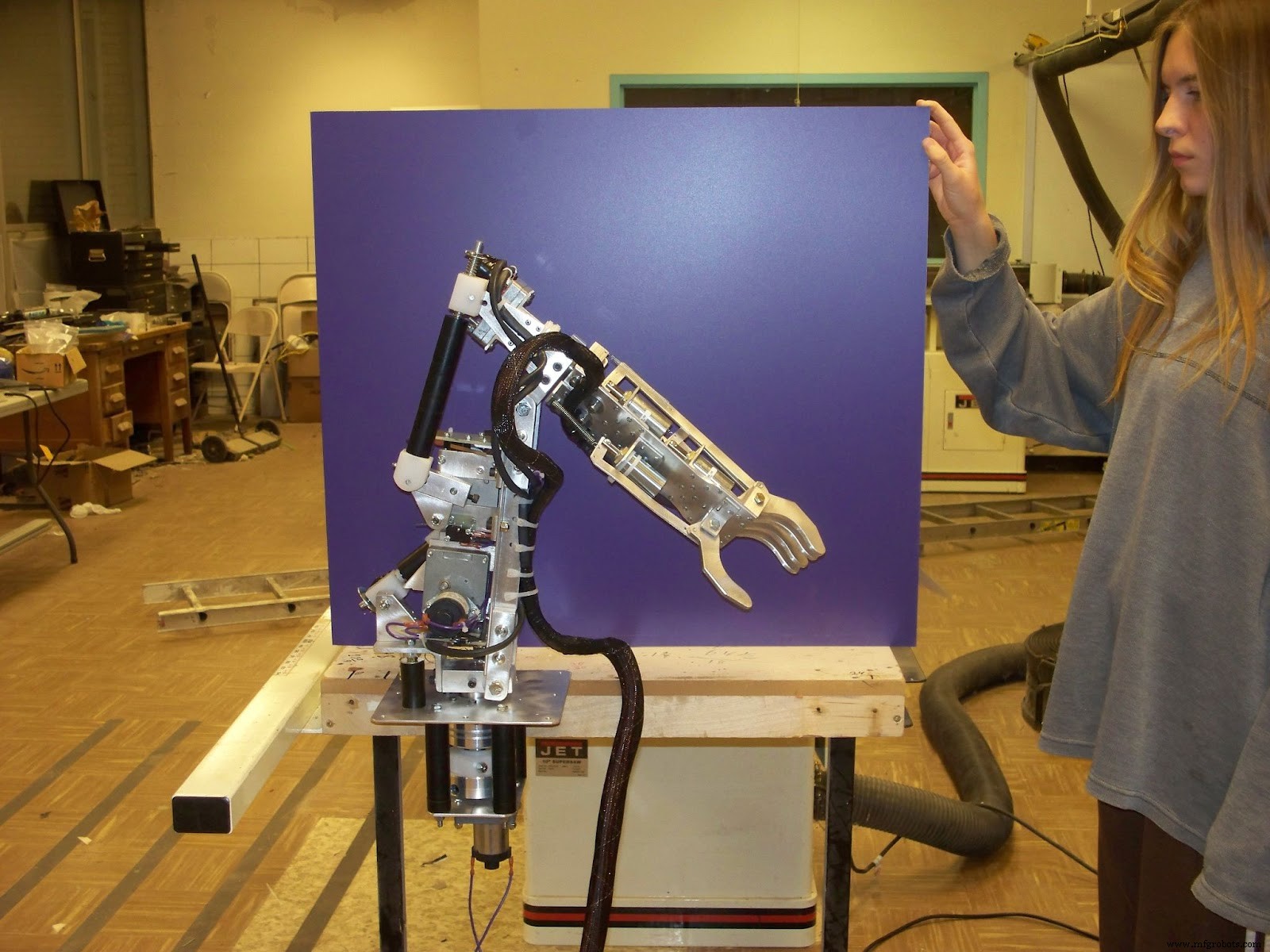
Brazo robótico en funcionamiento
Paso 1:Empieza a juntar las piezas
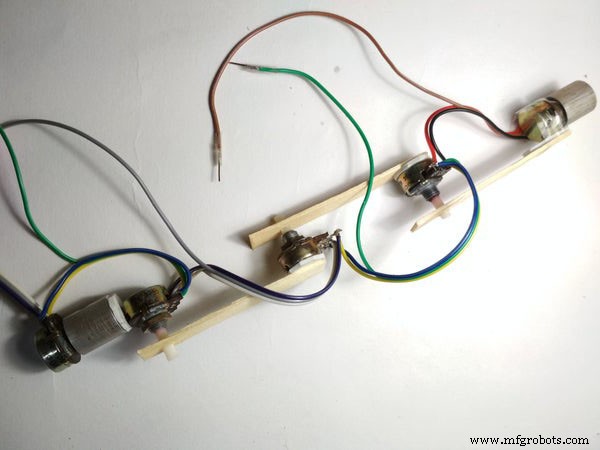
Paletas de madera conectadas al potenciómetro
Fuente:Instructable
El primer paso es conseguir una pieza de madera pequeña y estable para crear el brazo. Ya que estás, opta por cualquier diseño mecánico que prefieras. Luego, pega los servos a tu madera con una cinta (doble cara). Después de eso, sujete los servos a la madera con tornillos.
En cuanto al brazo principal, puedes hacerlo colocando tus potenciómetros en la pequeña pieza de madera. Puedes usar tu tablero de lona como base para montar tu configuración.
Paso 2:conecta tus cables
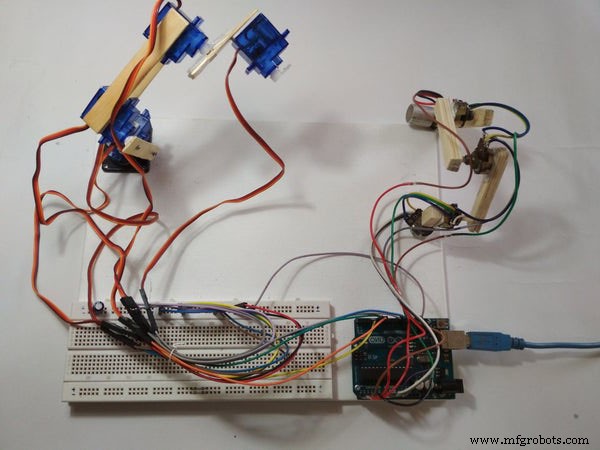
Conectar los cables y las piezas de madera en la placa
Fuente:Instructable
El objetivo aquí es asegurarse de conectar todos los cables correctamente. Y el primer paso es conseguir todos tus servos. Luego, haz una conexión en paralelo de los servos a la fuente de poder. Es decir, su cable negro debe ir a Gnd mientras que el cable rojo se conecta al positivo.
Una vez que tenga eso, obtenga sus cables de señal (naranja o amarillo) y conéctelo al pin PWM de Arduino. Con esto ya se puede proceder a conectar el Gnd de Arduino en paralelo. Además, debe conectar sus potenciómetros a +5V.
Luego, conecte su terminal central al pin analógico Arduino. Dicho esto, puede regular los servos con pines digitales como 10, 9, 6, 5 y 3. Además, puede usar A0 a A4 (pines analógicos) para la entrada de potenciómetros.
Además, el potenciómetro que se conecta a A0 ayuda a regular el servo que se conecta al pin 3. Además, el potenciómetro en A1 controla el servo que se conecta al pin 5.
Sin duda, el Arduino no alimenta los servos. Pero es vital asegurarse de conectar Arduino y GND correctamente para que el brazo funcione.
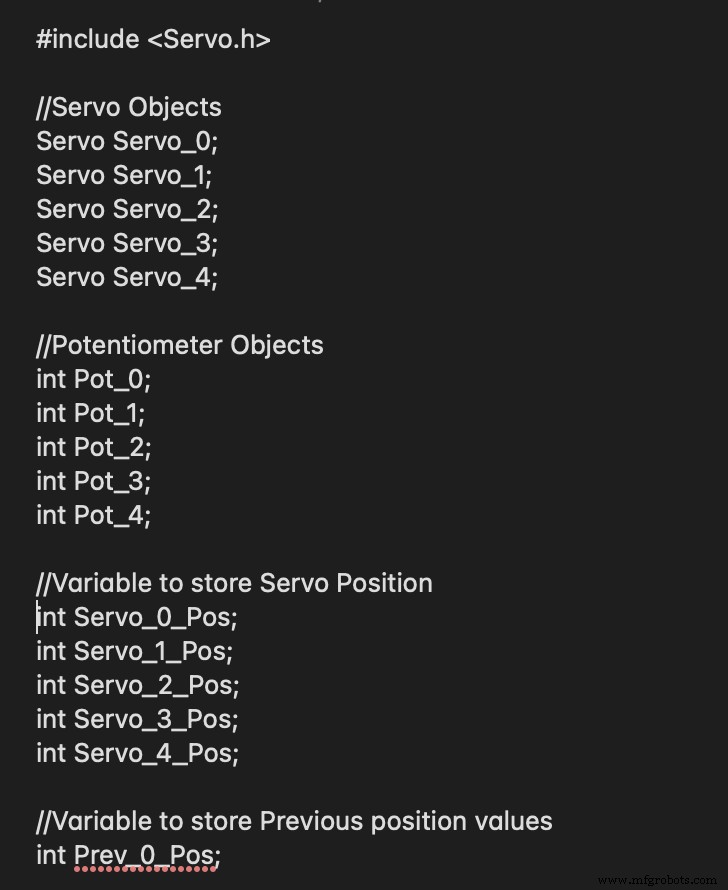
Paso 3:hora de codificar
El proceso de codificación de este proyecto es bastante sencillo. Entonces, puede comenzar almacenando los potenciómetros en una matriz. Cuando obtenga los registros, proceda a atravesarlo con un bucle for. De esa manera, los servos manejarán los pasos.
En otras palabras, puede iniciar el proceso declarando todas las variables importantes globalmente. Con esto, es más fácil entender y usar las variables en todo el programa.
Después de eso, continúe con la función principal que inicia la primera ejecución. Por lo tanto, creará una función de configuración que resaltará los pines establecidos y sus funciones.
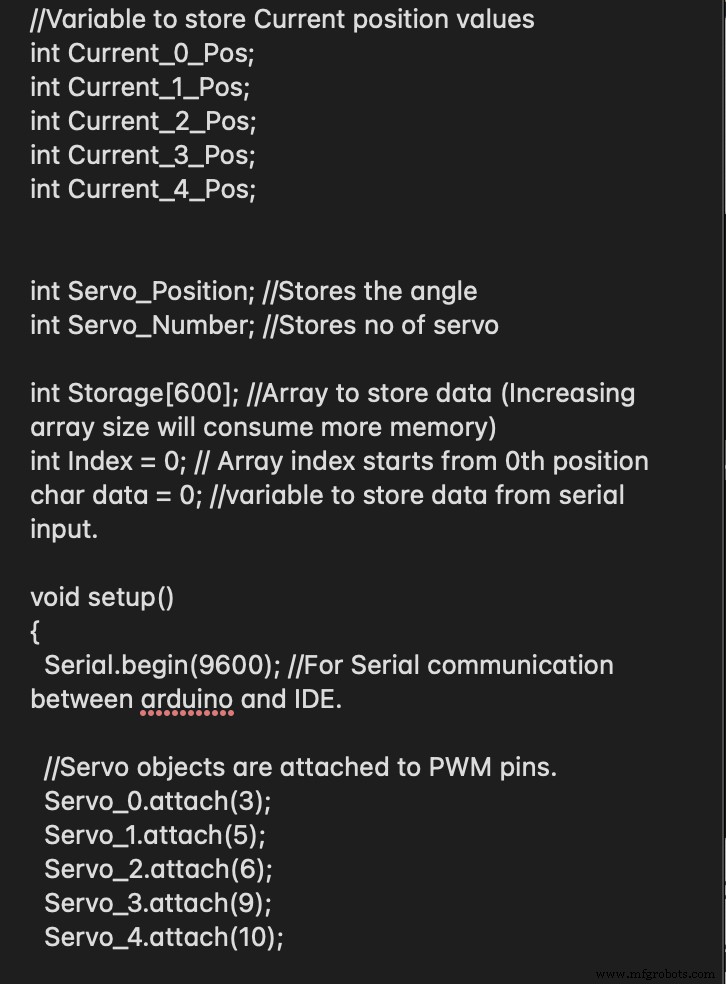
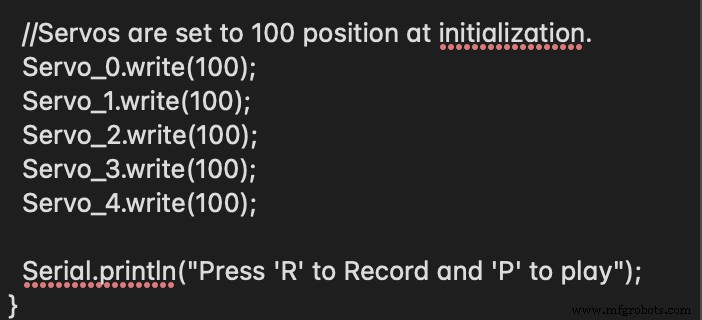
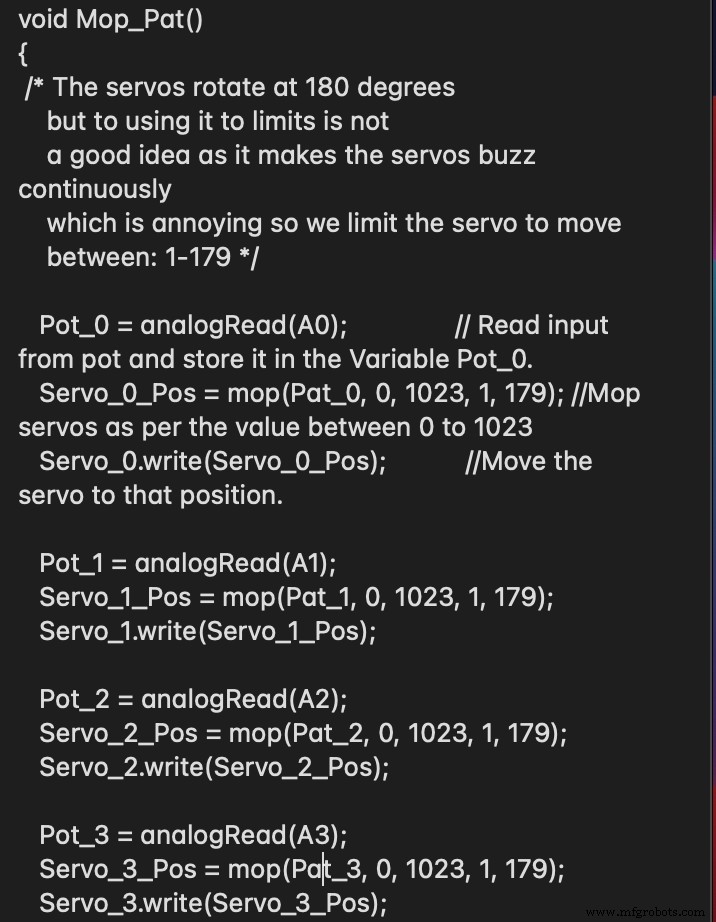
Cuando tenga eso, la siguiente tarea es usar los pines de entrada analógica para obtener los valores del potenciómetro. Además, los pines de entrada analógica ayudan a mapear los valores, lo que ayuda a regular los servos.
Ahora es el momento de nombrar la función definida por el usuario. En el siguiente código, elegimos Mop_Pat;.
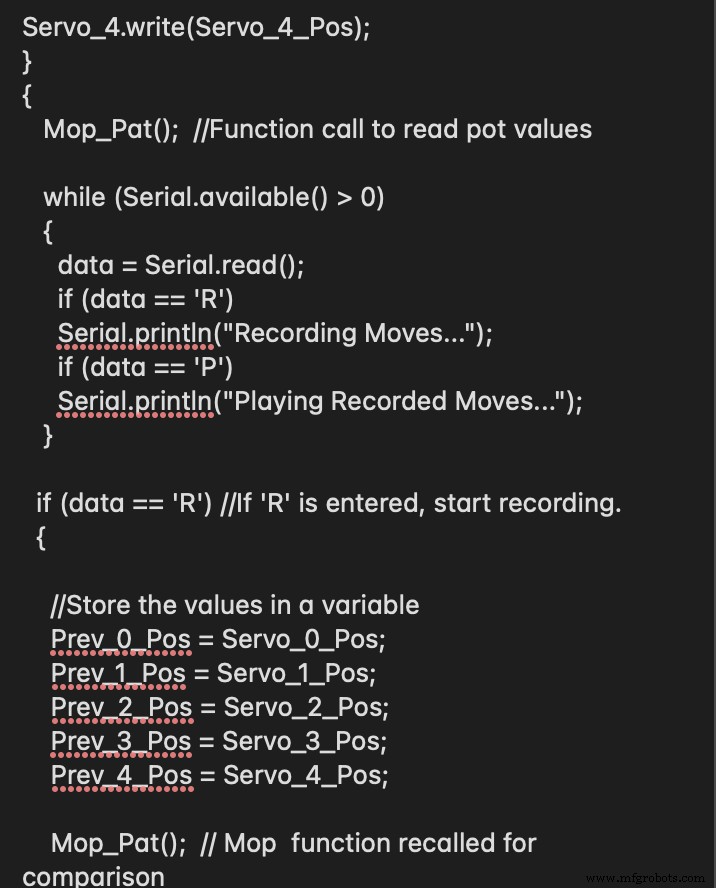
Con esto, puede dejar la función de bucle. Cuando termine con el código, puede transferirlo a la placa Arduino.
Con esto en su lugar, su brazo robótico funcionará. Además, puede hacer algunos ajustes con el código cuando sea necesario para una operación más fluida.
Paso 4:prueba de distancia
Cuando termines de transferir el código a la placa, ve a la opción Herramientas. En esta opción, vaya a "Serial Monitor". Cuando haga clic en esta función, le ayudará a restablecer el Arduino. Y le permite usar el brazo maestro para controlar el brazo robótico fácilmente. Sin embargo, en este punto no puedes registrar ningún movimiento.
Entonces, debe escribir "R" en el monitor para registrar todos los movimientos. Cuando hayas registrado todos tus movimientos, escribe "P". Esta función ayuda a reproducir todos los movimientos. Y lo mejor es que los servos seguirán ejecutando los movimientos, siempre y cuando no reinicies la placa.
Otras ideas de proyectos de brazo robótico Arduino
Si cree que el proyecto anterior es demasiado básico, siéntase libre de probar otras ideas de proyectos de robótica de brazo Arduino como:
El Brazo Robótico con Control de Gestos (Arduino + Kinect)
Brazo robótico controlado por gestos manuales
Fuente:Wikimedia Commons
Este proyecto consiste en dirigir un brazo robótico con gestos. Y puedes capturar los gestos con un sensor Kinect. Entonces, los ingenieros desarrollaron el brazo robótico para imitar el movimiento del codo, el brazo derecho, la mano y el codo. Además, también crearon esta herramienta con servomotores.
Un brazo robótico controlado por la web

Brazo robótico controlado por web
El brazo robótico controlado por la red es otro invento notable. La herramienta te muestra la posibilidad de coordinar el brazo robot con un servidor web. Curiosamente, una fuente externa alimenta este dispositivo y utiliza unos seis servomotores.
Entonces, para lograr esto, debe estudiar su flujo de trabajo, tomar nota del código fuente y comprender la arquitectura del sistema.
Brazo robótico Arduino controlado por Nunchuck
Esta idea de proyecto destaca por su singularidad. Con este proyecto, aprenderá a usar un Arduino Mega para programar el dispositivo y montar un brazo robot de manera efectiva. Además, puedes usar el Nunchuk de Nintendo para controlar esta herramienta.
Y lo mejor es que el Nunchuk tiene muchos sensores. Además, está fácilmente disponible y es barato. Entonces, si desea construir este brazo robótico, es crucial obtener una lista de las herramientas que necesita y el código.
Brazo robótico Arduino controlado por aplicación de Android

Brazo robótico en línea de producción
Este brazo robótico es otro proyecto de tareas que puede elegir. El dispositivo utiliza un módulo Bluetooth junto con Arduino a través de una aplicación de Android. Dicho esto, algunas de las herramientas que necesitará para construir este brazo robótico incluyen un motor genérico que tiene un módulo Bluetooth (HC-05) y un Arduino mega 2560.
La mano robótica controlada inalámbrica
Elegir este proyecto es ideal si quieres saber lo que se necesita para construir una mano robótica. Además, también te enseña cómo controlar esta herramienta. Además, necesitará herramientas como el sensor relacionado, las baterías, la placa Arduino y el servomotor para construir esta mano robótica con un guante inalámbrico.
El brazo robótico Arduino Bartender

Brazo robótico Arduino Bartender
Fuente:Arquitectura mundial
El brazo robótico Bartender es el proyecto ideal si buscas un proyecto divertido que impresione a los invitados. Esta herramienta generalmente tiene un brazo Snapper de RobotGeek. Además, tiene un inyector de válvula que potencia su función de coctelería. Por lo tanto, este proyecto hará un buen trabajo moviendo bebidas a su vaso desde un recipiente.
Brazo robótico Arduino controlado por ratón de computadora
Este proyecto es ideal si te encanta un proyecto de brazo Arduino que puedes controlar con el mouse de tu computadora. La mejor parte es que este brazo robótico Arduino puede tomar su decisión procesando imágenes. ¿Cómo? La herramienta lo hace con la ayuda del software de visión Matlab.
Palabras finales
El proyecto del brazo robótico se está convirtiendo rápidamente en una cosa en el mundo. Y es satisfactorio ver que estos dispositivos transportan artículos, balancean y apilan cosas con precisión, según el tipo. Y son útiles para aplicaciones médicas y exploración espacial.

Brazo robótico en fábrica
Por lo tanto, es un excelente momento para crear la versión económica de esta herramienta, especialmente si no desea manejar ninguna tarea recurrente. ¿Necesitas ayuda para empezar? No dude en ponerse en contacto con nosotros.
Tecnología Industrial
- Makerarm:un brazo robótico genial para los creadores
- La guía paso a paso del líder de fabricación para impulsar el tráfico del sitio web
- Brazo robótico:¿Cómo se fabrica?
- ¿Qué es un manipulador robótico? Una guía
- La guía definitiva para paletizadores robóticos
- Brazo robótico hidráulico en la industria manufacturera:una guía definitiva
- Brazo robótico Arduino impreso en 3D
- Brazo robótico controlado por Nunchuk (con Arduino)
- El mercado de los brazos robóticos crecerá hasta los 14.780 millones de USD para 2026
- Módulo RTC:la guía absoluta para un proyecto fácil
- El brazo robótico industrial:un auge en la fabricación