


Protección de motores:tipos de fallas y dispositivos de protección
Tipos de Fallas de Motor y Dispositivos de Protección
Fallas y fallas comunes del motor
Es importante conocer y comprender las fallas y fallas del motor definir los dispositivos de protección más adecuados para cada caso . También debe conocer términos importantes relacionados con el control y la protección de motores.
Ser máquinas no estáticas motores están sujetos a estrés eléctrico y mecánico .
Fallas del motor vienen en tres tipos básicos :eléctrico, mecánico y mecánico que progresa en eléctrico .
Tipos comunes de fallas y fallas del motor son:
- Fallo del rodamiento
- Rotura del aislamiento
- Rotor bloqueado
- Sobrecalentamiento
- Sobrecargas (eléctricas y mecánicas)
- El desequilibrio de fase y cualquier desequilibrio de voltaje conducirá a un desequilibrio de corriente aún mayor.
- Correr en reversa
- Desalineación del eje
- Vibración
Sobrecalentamiento puede ocurrir por subdimensionamiento del motor , refrigeración insuficiente a baja velocidad cuando se utilizan variadores de velocidad (CIV ), cambios en la carga en el motor como equipo atascado y condiciones ambientales cálidas .
Rotura del aislamiento , lo que lleva a devanados quemados , implicar cortocircuito ya sea dentro del motor o dentro del circuito de alimentación del motor , y puede ser causado por sobrecalentamiento, sobrecargas y sobretensiones .
Alrededor del 80 % de fallos de motores eléctricos son el resultado de daños en el devanado del estator del motor y fallas en los cojinetes .
Fallo del rodamiento en los motores puede ser una indicación de los rodamientos incorrectos para la aplicación .
Un motor montado verticalmente necesita orientaciones diferentes luego un motor montado horizontalmente . Un motor que impulsa una transmisión grande o de múltiples correas requerirá rodamientos que soporten grandes cargas radiales . Un motor atornillado a una placa base distorsionada se torcerá .
Rodamientos suelen ser pequeños en comparación con otros componentes principales del motor , haciéndolos particularmente vulnerables a daños y desgaste; algunos estudios atribuyen más de la mitad de todas las fallas de los motores al mal funcionamiento de los rodamientos , la mayoría de los cuales resultan de una lubricación demasiado escasa o excesiva . Otra causa importante de fallo de los rodamientos es desalineación .
Desalineación del eje destruirá cojinetes mucho antes de su vida laboral completa . El eje del motor debe estar directamente en línea con el eje que está impulsando lo que sólo se puede lograr utilizando técnicas de alineación de precisión como láser .
Otros problemas que pueden ocurrir con los motores son:
- Entrada de agua y polvo en las bobinas del estator o en la caja de terminales, lo que provoca cortocircuitos
- Pies de motor de pie blando atornillados fuera de nivel
- Montaje del motor o tipo de carcasa incorrectos
- Desequilibrio eléctrico o mecánico
Ruido indica problemas motores pero normalmente no causa daño . Ruido , sin embargo, suele ir acompañada de vibraciones .
Vibración puede causar daños de varias maneras . Tiende a aflojar los devanados y daña mecánicamente el aislamiento por agrietamiento, descamación o abrasión del material . La fragilización de los cables conductores por el movimiento excesivo y las chispas de las escobillas en los conmutadores o los anillos colectores de corriente también se debe a la vibración.
Finalmente, vibración puede fallo del cojinete de velocidad haciendo que las bolas golpeen los cojinetes de manguito "brinnell" para ser golpeado fuera de forma o las carcasas para aflojarse en las conchas .
Siempre que ruido o vibraciones se encuentran en un motor en funcionamiento, la fuente debe ser aislado y corregido rápidamente .
Lo que parece ser una fuente obvia de ruido o vibración puede ser un síntoma de un problema oculto. Por lo tanto, a menudo se requiere una investigación exhaustiva.
Ruido y vibraciones puede ser causado por un eje del motor desalineado o puede ser transmitido al motor de la máquina accionada o sistema de transmisión de potencia . También pueden ser el resultado de desequilibrio eléctrico o mecánico en el motor .
Desequilibrio eléctrico ocurre cuando la atracción magnética entre el estator y el rotor es desigual alrededor de periferia del motor . Esto hace que el eje se desvíe mientras gira creando un desequilibrio mecánico . Desequilibrio eléctrico generalmente indica una falla eléctrica como un estator abierto o devanado de rotor , una barra abierta o ring en motores de jaula de ardilla o bobinas de campo en cortocircuito en motores síncronos . Un entrehierro irregular, generalmente debido a cojinetes de manguito muy desgastados, también produce un desequilibrio eléctrico .
Las principales causas del desequilibrio mecánico incluyen un montaje distorsionado, eje doblado, rotor mal balanceado, piezas sueltas en el rotor o cojinetes defectuosos . Ruido también puede provenir del ventilador que golpea el marco, la cubierta o de objetos extraños dentro de la cubierta . Si los rodamientos son malos , como lo indica el ruido excesivo del cojinete , es necesario determinar por qué fallaron los rodamientos .
Otro problema al que se pueden enfrentar los motores es un tiempo de arranque prolongado . Si un motor está sujeto a muchos arranques sucesivos , los devanados del rotor o barras del rotor se puede calentar hasta el punto en que se dañen las conexiones eléctricas entre las barras del rotor y los anillos de los extremos .
Dispositivos de protección de motores
No importa qué voltaje nominal y tamaño Los motores tienen que están protegidos contra sobrecorrientes (cortocircuito) y sobrecargas .
Motores de BT de tamaño pequeño y mediano normalmente solo están protegidos contra sobrecargas y cortocircuitos y motores grandes de BT y motores de MT tener también otras protecciones .
Protecciones contra sobrecarga y sobrecorriente debe estar diseñado para ser insensible a las corrientes de irrupción en el momento de arranque , para evitar interrupción de energía intempestiva .
Para motores BT la protección contra sobrecorrientes y cortocircuitos puede ser realizado por fusibles , asociados a interruptores-seccionadores o interruptores automáticos de disparo instantáneo que responden a inmediato (casi instantáneo ) valores de corriente de un cortocircuito, falla a tierra o corriente de rotor bloqueado .
Disyuntores de tiempo inverso tienen funciones de viaje térmico e instantáneo y están preestablecidos para dispararse a niveles estandarizados .
Este es el tipo de disyuntor más común que se utiliza en la industria de la construcción residencial, comercial y de construcción pesada.
La acción térmica de este disyuntor responde al calor . Si las entradas y salidas de ventilación de un motor no son adecuadas para disipar el calor de los devanados del motor, el calor será detectado por la acción térmica del disyuntor .
Si cortocircuito debe ocurrir, la acción magnética del disyuntor detectará los valores instantáneos de corriente y disparará el disyuntor .
Fusibles por lo general no son adecuados para la protección contra sobrecargas , porque si dimensionado para proporcionar protección contra sobrecarga , explotarían cuando el motor arranca debido a la alta corriente de entrada del motor , aunque pueden usarse como una protección de respaldo de sobrecarga .
Protección con fusibles presenta el riesgo de daño monofásico al motor cuando solo se funde un fusible a menos que se proporcione protección monofásica; este tema se tratará más adelante en este capítulo.
Motores de BT y motores de MT de gran tamaño están protegidos contra cortocircuitos (fase a fase y fase a tierra ) por relés de sobreintensidad (50; 50N; 51; 51N ) conectado a CT .
La protección contra sobrecargas normalmente está asegurado por relé de sobrecarga térmica . Este relé puede ser de los siguientes tipos:
Tira bimetálica
Una protección contra sobrecarga térmica acomodará la alta corriente de arranque breve de un motor mientras protege con precisión de una sobrecarga de corriente en funcionamiento . El bobina del calentador y la acción de la banda bimetálica introducir un retraso de tiempo que le da tiempo al motor para arrancar y establecerse en la corriente de funcionamiento normal sin disparo por sobrecarga térmica . Protecciones contra sobrecargas térmicas se puede restablecer manual o automáticamente dependiendo de su aplicación y tener un ajustador que les permite ser ajustados con precisión a la corriente de funcionamiento del motor .
Temperatura ambiente en el que se encuentra un arrancador y un motor debe ser considerado al seleccionar relés de banda bimetálica porque una temperatura ambiente alta reduce el tiempo de disparo por sobrecarga .
Reducción del tiempo de disparo por sobrecarga puede provocar disparos molestos si un motor está ubicado en una temperatura ambiente más fría que el arrancador y conduce al agotamiento del motor cuando el motor está ubicado a una temperatura ambiente más alta que el arrancador .
La mayoría de los dispositivos de sobrecarga térmica están clasificados para su uso a una temperatura máxima de 40 ºC , y es posible que se requiera una reducción de potencia del relé .
La mayoría de los retransmisiones son ajustables en un rango del 85 % al 115 % de su valor.
Algunos modelos están disponibles con compensación ambiental . Un dispositivos con compensación ambiental punto de viaje no se ve afectado por la temperatura ambiente y funciona consistentemente con el mismo valor de corriente.
Este tipo de relés se usa comúnmente en motores LV de tamaño bajo y mediano .
Los estándares y los datos de los fabricantes suelen mostrar punto de ajuste de regulación recomendado de este tipo de relés de acuerdo con la potencia nominal del motor; las mismas tablas también muestran las corrientes nominales recomendadas de los fusibles (tipo aM o gG – consulte la Sección 2.4) y disyuntores instantáneos que están asociados a los relés de protección contra sobrecorriente , como se muestra en la Tabla 3.
Tabla 3:Corriente nominal de los fusibles para protección de motores 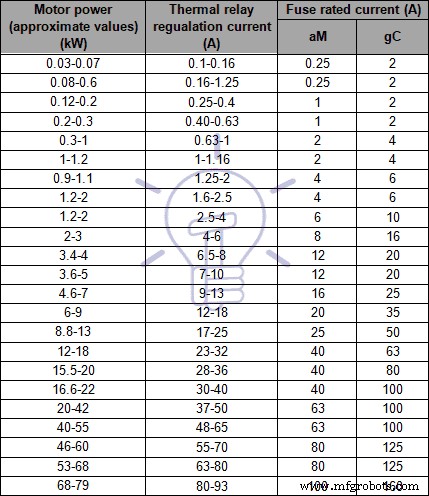
Relés de sobrecarga digitales electrónicos
Este tipo de protección se utiliza para motores grandes de baja tensión y motores de alta tensión y contiene un microprocesador . Estos dispositivos pueden modelar el calentamiento de los devanados del motor al monitorear la corriente del motor y también pueden incluir funciones de medición y comunicación.
Protección común de grandes motores BT y MT se suele realizar mediante los siguientes dispositivos de protección:
- Protección contra sobrecarga:49
- Sobrecorriente de fase instantánea:50
- Sobrecorriente instantánea de tierra:50N/50G
- Sobrecorriente de fase de retardo de tiempo:51
- Sobrecorriente de tierra con retardo de tiempo:51N/51G
En algunas situaciones no se recomienda para proteger los motores contra sobrecargas; es el caso de las bombas de agua contraincendios y extractores de humos .
Motores BT y motores MV muy grandes son costosos y, por lo general, es aconsejable proporcionar esquemas de protección más completos . Dichos esquemas incluyen:
- Monitores de temperatura y protección de rodamientos (38 )
- Protección diferencial (87M )
- Protección de secuencia de inicio incompleta/tiempo de inicio prolongado (66 )
- Secuencia de fase negativa (protección contra inversión de fase )
- Protección contra sobrecalentamiento
- Protección contra desbalance o falla de fase (47 )
- Protección de rotor bloqueado o bloqueado
- Protección de bajo y sobrevoltaje (27 y 59 , respectivamente)
- Monitores de vibraciones y protección (39)
- Monitores de temperatura de devanados y dispositivos de protección
Protección diferencial para motores LV y HV
Protección diferencial a menudo se proporciona para motores de tamaño mediano y grande con tensiones de alimentación superiores a unos 4 kV y accionados eléctricamente (disparo de derivación ) disyuntores . La protección diferencial proporciona dirección de alta velocidad y eliminación de fallas en los devanados del estator del motor .
- Lea también:Cómo calcular el tamaño del cable para motores LT y HT
Donde el sistema de suministro de energía esté sólidamente conectado a tierra, la protección diferencial detectará fallas de fase a fase y de fase a tierra .
Con protección diferencial la corriente en cada extremo de cada devanado se compara para determinar cuándo existe una condición de falla .
Esta función requiere dos juegos de CT , uno al principio del alimentador del motor, y el otro en el punto estrella .
La función de protección diferencial solo se puede usar si ambos lados de cada fase del estator se sacan del motor para conexión externa tal que la corriente de fase que entra y sale de cada fase se puede medir . El elemento diferencial resta la corriente que sale de cada fase de la corriente que entra en cada fase y compara el resultado o la diferencia con el nivel de captación diferencial.
Si esta diferencia es igual o mayor que el nivel de recogida, se producirá un viaje .
La Figura 19 muestra un ejemplo de esta protección. 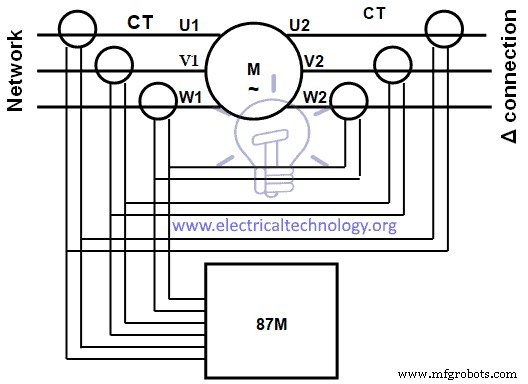
Figura 19 – Protección diferencial del motor
Usando seis CT en una configuración de suma , durante el arranque del motor los valores de los dos TC de cada fase pueden no ser iguales l como el CT son no perfectamente idénticos y corrientes asimétricas puede causar que el CT en cada fase tenga salidas diferentes .
Para evitar tropezones molestos en esta configuración, el nivel diferencial es posible que deba ser establecido como menos sensible , o el retraso de tiempo diferencial puede ser necesario ampliarlo para superar el período problemático durante el arranque del motor .
El retraso diferencial en ejecución luego se puede afinar a una aplicación tal que responde muy rápido y es sensible a bajos niveles de corriente diferencial .
Recalentamiento de los devanados la protección generalmente se realiza con detectores de temperatura de resistencia (RTD ) y termistor y dispositivos de apagado automático se puede instalar. Colocación de un ventilador de refuerzo independiente para ayudar al ventilador del motor resuelve el problema de sobrecalentamiento cuando un VSD se utiliza para controlar la velocidad del motor necesidad.
La secuencia de inicio incompleta o el tiempo de inicio prolongado provocan el sobrecalentamiento del rotor .
Como es no es posible medir físicamente el calor del rotor en motores de jaula de ardilla es necesario determinar el calor al medir la corriente que el rotor pasa a través del estator para excitar el rotor. Una réplica térmica del rotor se establece mediante un I 2 t curva .
La inhibición de reinicio bloqueará al usuario para que no arranque el motor si el relé determinó que el rotor alcanzó una temperatura que dañará el rotor debería intentarse un comienzo . Por lo tanto, el relé solo permitirá un reinicio si el rotor tiene suficiente reserva térmica para arrancar .
Protección de rodamientos generalmente lo realiza RTD y thermistor para controlar la temperatura .
Protección contra vibraciones utiliza sensores/acelerómetros que normalmente se colocan en ubicaciones clave en el motor y cojinetes .
Puesto que los rodamientos son la parte que soporta la carga del tren de transmisión mecánica, acelerómetros debe ser colocado en la entrada y salida
La Figura 20 muestra un ejemplo de sensores de vibración y ubicaciones recomendadas. 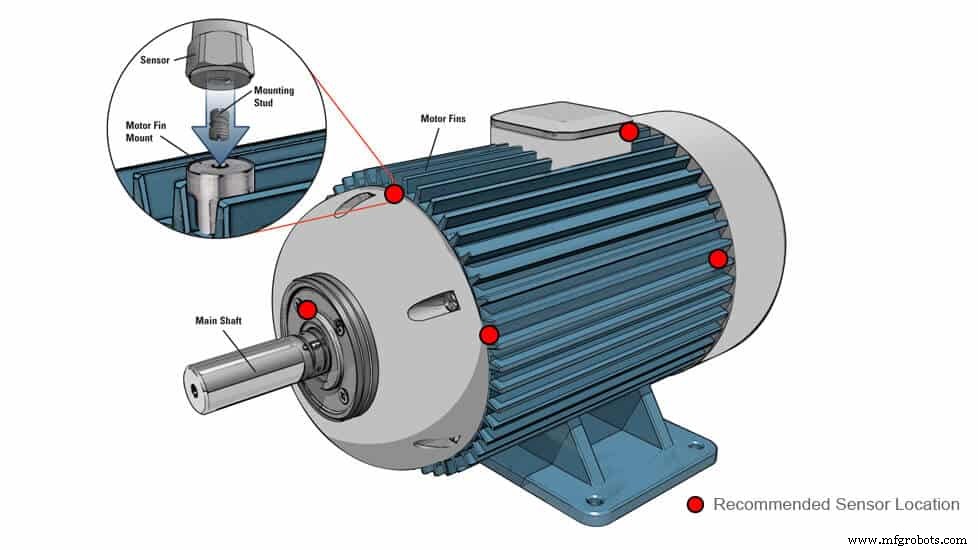
Figura 20:sensores de vibración del motor
Hoy en día IED (ver Sección 2.1) que agrupan todas las funciones de protección requeridas se utilizan comúnmente para motores grandes de baja tensión y motores de media tensión .

Sobre el autor:Manuel Bolotinha
-Licenciatura en Ingeniería Eléctrica – Energía y Sistemas de Potencia (1974 – Instituto Superior Técnico/Universidad de Lisboa)– Maestría en Ingeniería Eléctrica e Informática (2017 – Faculdade de Ciências e Tecnologia/Nova Universidad de Lisboa)
– Consultor Senior en Subestaciones y Sistemas de Potencia; Instructor profesional
Tecnología Industrial
- ¿Qué es la creación rápida de prototipos? - Tipos y funcionamiento
- ¿Qué es la fabricación aditiva? - Tipos y funcionamiento
- ¿Qué es la soldadura? - Tipos y cómo soldar
- ¿Qué son los trenes de laminación y sus tipos?
- ¿Qué es la soldadura por resistencia? - Tipos y funcionamiento
- ¿Qué es la arena de moldeo? - Tipos y propiedades
- ¿Qué es la pulverización térmica? - Tipos y aplicación
- Tipos de máquinas de descarga eléctrica (EDM), ventajas y desventajas
- Tipos de operaciones de torno y herramientas de corte
- Proceso de fabricación Significado y tipos
- ¿Qué es la protección contra sobrecargas?