


Motor de CC sin escobillas
Los motores de CC sin escobillas se desarrollaron a partir de motores de CC convencionales con escobillas con la disponibilidad de semiconductores de potencia de estado sólido. Entonces, ¿por qué hablamos de motores de CC sin escobillas en un capítulo sobre motores de CA?
Los motores de CC sin escobillas son similares a los motores síncronos de CA. La principal diferencia es que los motores síncronos desarrollan una EMF trasera sinusoidal , en comparación con un EMF trasero rectangular o trapezoidal para motores de CC sin escobillas.
Ambos tienen campos magnéticos giratorios creados por el estator que producen un par en un rotor magnético.
Los motores síncronos suelen tener un tamaño grande de varios kilovatios, a menudo con rotores de electroimán. Los verdaderos motores síncronos se consideran de una sola velocidad, un submúltiplo de la frecuencia de la línea eléctrica. Los motores de CC sin escobillas tienden a ser pequeños, de unos pocos vatios a decenas de vatios, con rotores de imanes permanentes.
La velocidad de un motor de CC sin escobillas no es fija a menos que sea impulsado por un bucle bloqueado en fase esclavo a una frecuencia de referencia. El estilo de construcción es cilíndrico o panqueque.
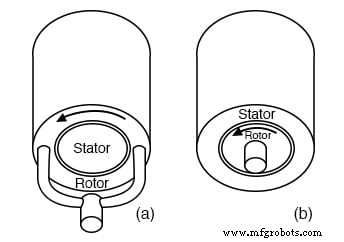
Construcción cilíndrica:(a) rotor exterior, (b) rotor interior
La construcción más habitual, cilíndrica, puede adoptar dos formas (figura anterior). El estilo cilíndrico más común es con el rotor en el interior, arriba a la derecha. Este estilo de motor se utiliza en unidades de disco duro. También es posible colocar el rotor en el exterior que rodea al estator.
Tal es el caso de los motores de ventilador de CC sin escobillas, sin eje. Este estilo de construcción puede ser corto y robusto. Sin embargo, la dirección del flujo magnético es radial con respecto al eje de rotación.
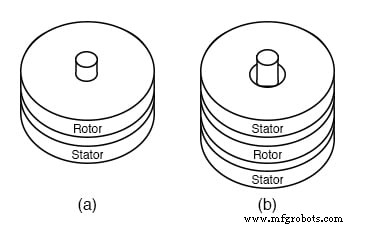
Construcción del motor tipo panqueque:(a) estator simple, (b) estator doble
Los motores tipo panqueque de alto par pueden tener bobinas de estator en ambos lados del rotor (figura arriba-b).
Las aplicaciones de par más bajo, como los motores de unidad de disco flexible, son suficientes con una bobina de estator en un lado del rotor (Figura anterior-a). La dirección del flujo magnético es axial, es decir, paralela al eje de rotación.
La función de conmutación puede ser realizada por varios sensores de posición del eje:codificador óptico, codificador magnético (resolver, sincronizador, etc.) o sensores magnéticos de efecto Hall. Los motores pequeños y económicos utilizan sensores de efecto Hall.
Un sensor de efecto Hall es un dispositivo semiconductor donde el flujo de electrones se ve afectado por un campo magnético perpendicular a la dirección del flujo de corriente. Parece una red de resistencias variables de cuatro terminales. Los voltajes en las dos salidas son complementarios.
La aplicación de un campo magnético al sensor provoca un pequeño cambio de voltaje en la salida. La salida Hall puede impulsar un comparador para proporcionar un impulso más estable al dispositivo de potencia. O puede impulsar una etapa de transistor compuesto si está polarizado correctamente.
Los sensores de efecto Hall más modernos pueden contener un amplificador integrado y circuitos digitales. Este dispositivo de 3 conductores puede impulsar directamente el transistor de potencia que alimenta un devanado de fase. El sensor debe montarse cerca del rotor de imán permanente para detectar su posición.

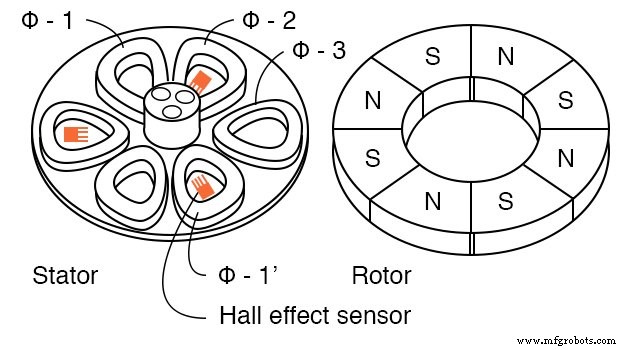
Los sensores de efecto Hall conmutan un motor de CC sin escobillas de 3 φ
El motor cilíndrico simple de 3 φ (figura anterior) se conmuta mediante un dispositivo de efecto Hall para cada una de las tres fases del estator. El dispositivo Hall detecta la posición cambiante del rotor de imán permanente a medida que cambia la polaridad del polo del rotor que pasa.
Esta señal de Hall se amplifica para que las bobinas del estator sean impulsadas con la corriente adecuada. No se muestra aquí, las señales Hall pueden ser procesadas por lógica combinatoria para formas de onda de excitación más eficientes.
El motor cilíndrico anterior podría impulsar un disco duro si estuviera equipado con un bucle bloqueado en fase (PLL) para mantener una velocidad constante. Un circuito similar podría impulsar el motor de la unidad de disquete tipo panqueque (figura siguiente). Nuevamente, necesitaría un PLL para mantener una velocidad constante.
Motor de panqueques sin escobillas
El motor tipo panqueque de 3 φ tiene 6 polos de estator y 8 polos de rotor. El rotor es un anillo de ferrita plano magnetizado con ocho polos alternos magnetizados axialmente. No mostramos que el rotor esté cubierto por una placa de acero dulce para montar en el cojinete en el medio del estator.
La placa de acero también ayuda a completar el circuito magnético. Los polos del estator también están montados sobre una placa de acero, lo que ayuda a cerrar el circuito magnético.
Las bobinas del estator planas son trapezoidales para ajustarse más estrechamente a las bobinas y aproximarse a los polos del rotor. Las bobinas de 6 estator comprenden tres fases de bobinado.
Si las tres fases del estator se energizaran sucesivamente, se generaría un campo magnético giratorio.
El rotor de imán permanente seguiría como en el caso de un motor síncrono. Un rotor de dos polos seguiría este campo a la misma velocidad de rotación que el campo giratorio. Sin embargo, nuestro rotor de 8 polos girará a un submúltiplo de esta velocidad debido a los polos adicionales en el rotor.
El motor del ventilador de CC sin escobillas tiene estas características:

Motor de ventilador sin escobillas, 2-φ
- El estator tiene 2 fases distribuidas entre 4 polos
- Hay 4 polos salientes sin devanados para eliminar puntos de par cero.
- El rotor tiene cuatro polos impulsores principales.
- El rotor tiene 8 polos superpuestos para ayudar a eliminar los puntos de par cero.
- Los sensores de efecto Hall están espaciados a 45o físicos.
- La carcasa del ventilador se coloca encima del rotor, que se coloca sobre el estator.
El objetivo de un motor de ventilador sin escobillas es minimizar el costo de fabricación. Este es un incentivo para cambiar los productos de menor rendimiento de una configuración de 3 φ a una de 2 φ. Dependiendo de cómo se maneje, se le puede llamar motor de 4 φ.
Tal vez recuerde que los motores de CC convencionales no pueden tener un número par de polos de inducido (2, 4, etc.) si van a tener arranque automático, siendo común 3, 5, 7. Por lo tanto, es posible que un motor hipotético de 4 polos se detenga con un par mínimo, donde no se puede arrancar desde el reposo.
La adición de los cuatro pequeños polos salientes sin devanados superpone un par de ondulación sobre la curva de par frente a posición. Cuando este par de ondulación se agrega a la curva de par energizado normal, el resultado es que los mínimos de par se eliminan parcialmente.
Esto hace posible arrancar el motor en todas las posibles posiciones de parada. La adición de ocho polos de imán permanente al rotor de imán permanente de 4 polos normal superpone un pequeño segundo par de ondulación armónica sobre el par de ondulación normal de 4 polos.
Esto elimina aún más los mínimos de torque. Siempre que los mínimos de par no bajen a cero, deberíamos poder arrancar el motor. Cuanto más éxito tengamos en eliminar los mínimos de par, más fácil será el arranque del motor.
El estator de 2 φ requiere que los sensores Hall estén separados 90 ° eléctrico. Si el rotor fuera un rotor de 2 polos, los sensores Hall se colocarían 90 ° físico. Como tenemos un rotor de imanes permanentes de 4 polos, los sensores deben colocarse a 45 ° físico para lograr los 90 ° espaciamiento eléctrico. (Tenga en cuenta el espacio entre los pasillos arriba).
La mayor parte del par se debe a la interacción de las bobinas internas de 2 φ del estator con la sección de 4 polos del rotor. Además, la sección de 4 polos del rotor debe estar en la parte inferior para que los sensores Hall detecten las señales de conmutación adecuadas.
La sección del rotor de 8 polos es solo para mejorar el arranque del motor.

Motor de CC sin escobillas de 2 φ empujar-tirar
En la figura anterior, el impulsor de empuje y tracción de 2 φ (también conocido como impulsor de 4 φ) utiliza dos sensores de efecto Hall para impulsar cuatro devanados. Los sensores están espaciados 90 ° eléctrico aparte, que es 90 ° físico para un rotor unipolar.
Dado que el sensor Hall tiene dos salidas complementarias, un sensor proporciona conmutación para dos devanados opuestos.
Tecnología Industrial
- Motores de inducción monofásicos
- Motores de conmutador de CA
- Nanotec:controlador de motor compacto para motores DC sin escobillas y motores paso a paso
- Cómo solucionar problemas de motores de rotor bobinado
- Consejo sobre motores eléctricos:minimiza tus arranques
- Consejo técnico:Motores
- Seguridad de motores eléctricos:diferentes fases y medidas de seguridad
- 4 tipos principales de fallas de bobinado en motores eléctricos de CA
- Acerca de Motores Industriales y Aplicaciones
- Automatización y motores BLDC
- Una introducción al motor BLDC