


Las pinzas robóticas de Kirigami son lo suficientemente delicadas para levantar yemas de huevo
Investigadores de ingeniería de la Universidad Estatal de Carolina del Norte han demostrado un nuevo tipo de pinzas robóticas flexibles que pueden levantar delicadas yemas de huevo sin romperlas y que son lo suficientemente precisas como para levantar un cabello humano. El trabajo tiene aplicaciones tanto para la robótica blanda como para las tecnologías biomédicas.
El trabajo se basa en el arte del kirigami, que consiste en cortar y plegar hojas de material bidimensionales (2D) para formar formas tridimensionales (3D). Específicamente, los investigadores han desarrollado una nueva técnica que involucra el uso de kirigami para convertir láminas 2D en estructuras 3D curvas cortando hendiduras paralelas en gran parte del material. La forma final de la estructura 3D está determinada en gran parte por el límite exterior del material. Por ejemplo, un material 2D que tiene un límite circular formaría una forma esférica 3D.
“Hemos definido y demostrado un modelo que permite a los usuarios trabajar hacia atrás”, dice Yaoye Hong, primer autor de un artículo sobre el trabajo. “Si los usuarios saben qué tipo de estructura 3D curva necesitan, pueden usar nuestro enfoque para determinar la forma del límite y el patrón de las rendijas que necesitan usar en el material 2D. El control adicional de la estructura final es posible al controlar la dirección en la que se empuja o tira del material”.
Nuestra técnica es bastante más simple que las técnicas anteriores para convertir materiales 2D en estructuras 3D curvas y permite a los diseñadores crear una amplia variedad de estructuras personalizadas a partir de materiales 2D”, dijo el profesor Jie Yin.
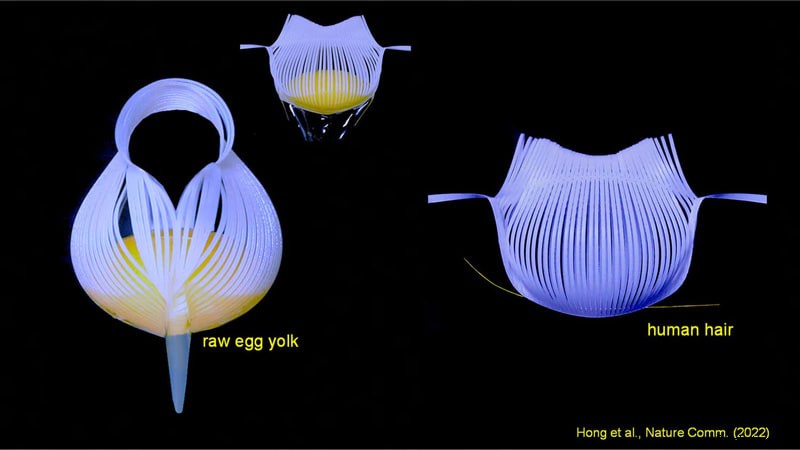
Los investigadores demostraron la utilidad de su técnica mediante la creación de pinzas capaces de agarrar y levantar objetos que van desde yemas de huevo hasta un cabello humano.
“Las pinzas convencionales agarran un objeto con firmeza, agarran las cosas ejerciendo presión sobre ellas”, dijo Yin. “Eso puede plantear problemas al intentar agarrar objetos frágiles, como las yemas de huevo. Pero nuestras pinzas esencialmente rodean un objeto y luego lo levantan, de manera similar a la forma en que ahuecamos las manos alrededor de un objeto. Esto nos permite 'agarrar' y mover incluso objetos delicados, sin sacrificar la precisión".
Sin embargo, los investigadores señalan que hay muchas otras aplicaciones potenciales, como el uso de la técnica para diseñar tecnologías biomédicas que se ajusten a la forma de una articulación, como la rodilla humana.
“Piense en vendajes inteligentes o dispositivos de monitoreo capaces de doblarse y moverse con la rodilla o el codo”, dijo Yin. “Este es un trabajo de prueba de concepto que muestra que nuestra técnica funciona. Ahora estamos en el proceso de integrar esta técnica en tecnologías de robótica blanda para abordar los desafíos industriales. También estamos explorando cómo podría usarse esta técnica para crear dispositivos que podrían usarse para aplicar calor a la rodilla humana, lo que tendría aplicaciones terapéuticas”.
Sistema de control de automatización
- Aplicación destacada:Impresión 3D para pinzas robóticas
- Pinzas de robot ensambladas en EE. UU.
- El estándar ETSI IoT:¿Están los reguladores haciendo lo suficiente para proteger los dispositivos IoT?
- Opinión:Las herramientas robóticas de extremo de brazo están dando forma a la industria manufacturera
- OnRobot lanza un sistema de lijado robótico
- Bobacino lanza bar de té robótico
- Prácticas recomendadas de gestión robótica de cables
- ¿Qué son los disyuntores inteligentes?
- El sensor de fuerza/par aumenta la versatilidad robótica
- ¿Estás preparado para ser cobot?
- ¿Qué son los cobots (robots colaborativos)?