


Agregue LiDAR a ADAS para la seguridad de los peatones
La mayoría de los vehículos nuevos que se venden hoy en los Estados Unidos incluyen sistemas avanzados de asistencia al conductor (ADAS) equipados con frenado automático de emergencia para peatones (PAEB) como característica estándar u opcional. Si bien los ADAS de última generación han mejorado la conducción en autopistas y a alta velocidad, la necesidad básica de mitigación de colisiones con peatones y ciclistas en su mayoría no se ha abordado.
Más de 6000 peatones mueren cada año en accidentes relacionados con el tráfico en los Estados Unidos, informó la Administración Nacional de Seguridad del Tráfico en las Carreteras (NHTSA). Un informe de la Asociación de Seguridad en las Carreteras de los Gobernadores señaló que el 75 por ciento de estas muertes ocurren durante la noche. El uso de ADAS basado en tecnologías de cámara y radar ha demostrado ser inadecuado para abordar este desafío. Las pruebas independientes realizadas por la NHTSA y la Asociación Estadounidense del Automóvil (AAA) revelan que los sistemas PAEB con frecuencia no protegen a los peatones en condiciones de oscuridad.
Prueba de PAEB en condiciones de oscuridad

Los sistemas PAEB podrían salvar miles de vidas anualmente al mejorar el rendimiento en condiciones de oscuridad. Entre 2009 y 2018, las muertes de peatones aumentaron en un 53 por ciento. De este aumento, el 90 por ciento fue causado por choques nocturnos, según los informes del Instituto de Seguros para la Seguridad en las Carreteras (IIHS) y la Asociación de Gobernadores para la Seguridad en las Carreteras. La NHTSA ha informado que en 2018, el 76 % de las 6283 muertes por accidentes de peatones en los EE. UU. ocurrieron en condiciones de oscuridad.
Las evaluaciones realizadas por AAA y NHTSA han demostrado que las características de PAEB con frecuencia no logran evitar accidentes durante la noche. El informe de la AAA indicó que “hay poca o ninguna información disponible públicamente sobre el rendimiento de los sistemas de detección de peatones en condiciones de poca luz. Según las estadísticas de choques de vehículos/peatones, este entorno es especialmente crítico para evaluar”. Agregar que probar PAEB en condiciones de oscuridad llenaría ese vacío. "Si bien este parámetro es muy desafiante, es un escenario de prueba razonable considerando la falta de iluminación en muchos entornos naturalistas".
AAA encontró que en una prueba de cuatro vehículos, ninguno alertó al conductor o redujo automáticamente la velocidad de un peatón que cruzaba la calle en condiciones de oscuridad. Con base en estos resultados, AAA advierte que "los conductores no deben depender de la asistencia de los sistemas actuales de detección de peatones durante la conducción nocturna u otros entornos con visibilidad reducida". Concluyendo su análisis, el informe de la AAA señaló que aunque “el manual del propietario de cada vehículo de prueba establece que el sistema integrado de detección de peatones puede no detectar a los peatones durante la noche o en condiciones climáticas adversas como lluvia, nieve, aguanieve o niebla... es irrefutable que la asistencia de un sistema de detección de peatones sería beneficioso durante la noche y posiblemente podría ser el momento de mayor necesidad”.
Sin embargo, el examen de los protocolos actuales empleados por el Programa de Evaluación de Autos Nuevos (NCAP) de la NHTSA, el Programa Europeo de Evaluación de Autos Nuevos (Euro NCAP) y el IIHS demuestra que el rendimiento en condiciones nocturnas rara vez se prueba como base para las clasificaciones y premios de seguridad de los vehículos.
Por lo tanto, Velodyne LiDAR (San José, CA) propone que las organizaciones de evaluación incluyan en sus protocolos de prueba PAEB, escenarios realizados en condiciones de oscuridad. Adoptar este enfoque garantizará que los consumidores de vehículos equipados con funciones PAEB comprendan las limitaciones del rendimiento de sus vehículos y alentará a los fabricantes de automóviles a mejorar las funciones ADAS que pueden salvar miles de vidas anualmente. Más precisamente, estas pruebas deben realizarse con una iluminación ambiental de menos de un lux, utilizando las luces bajas del vehículo de prueba y sin la ayuda de farolas.
Comparación de los sistemas PAEB de cámara/radar y LiDAR
Las soluciones PAEB basadas en LiDAR tienen ventajas inherentes en comparación con las combinaciones de cámara y radar.
Las cámaras pueden tener una resolución muy alta, pero generalmente requieren múltiples módulos y procesamiento adicional para calcular las distancias de los objetos desde un vehículo. Además, al igual que el ojo humano, las cámaras funcionan relativamente mal en condiciones de oscuridad. Un informe del Departamento de Transporte (DOT) de 2018 afirma:"Los sistemas basados en visión son más capaces [que los sistemas basados en radar] para detectar personas estacionarias, pero se limitan a la operación diurna en entornos bien iluminados".
En comparación con las cámaras, señaló el informe del DOT, el radar funciona bien de noche y puede proporcionar mediciones de distancia. Pero el radar no tiene una resolución lo suficientemente alta como para percibir la ubicación precisa de un objeto o distinguir entre varios objetos que están cerca unos de otros. El radar también puede fallar al detectar objetos estacionarios o que se mueven lentamente. Como resultado de estas deficiencias, las funciones PAEB basadas en cámaras y radares tienen dificultades para proteger a los peatones en condiciones nocturnas.
Ocasionalmente, se ha propuesto la termografía como un posible complemento de la cámara y el radar en aplicaciones PAEB. Sin embargo, esta tecnología presenta sus propias debilidades y no aborda adecuadamente las de los sistemas actuales de cámaras y radares. Al igual que con las cámaras ópticas, la capacidad del sistema de un vehículo para detectar objetos con datos del sensor térmico depende de la capacidad del sensor para percibir y transmitir correctamente el contraste entre un objeto y su entorno. Como resultado, ambas modalidades de detección pueden pasar por alto objetos que se mezclan con sus fondos. En el caso de las imágenes térmicas, esto resultaría de la combinación de características de calor similares, en lugar de colores o ilusiones ópticas similares, como ocurre con las cámaras.
Por el contrario, LiDAR no sufre ninguno de estos inconvenientes característicos de la cámara, el radar y los sensores térmicos. LiDAR actúa como su propia fuente de luz, por lo que funciona bien tanto en la oscuridad como en la luz del día. También proporciona datos de medición rápidos y precisos con una resolución lo suficientemente alta para una detección precisa del espacio libre en tiempo real mientras se rastrean varios objetos dentro de una escena.
Las soluciones PAEB basadas en LiDAR asequibles que están disponibles actualmente mejorarían significativamente el rendimiento en todas las condiciones de iluminación. Esto se confirmaría si las agencias reguladoras y de pruebas agregaran pruebas oscuras a sus protocolos de evaluación.
Prueba del sistema PAEB basado en LiDAR contra tecnología basada en cámara y radar
Para demostrar que se puede lograr un rendimiento PAEB nocturno mejorado mediante la implementación de tecnologías fácilmente disponibles, Velodyne probó su sistema PAEB basado en LiDAR contra un sistema PAEB de alta calificación construido alrededor de una cámara y un radar. Las pruebas se realizaron a una velocidad controlada por el conductor con un objetivo de 30 mph en una pista recta, una hora después de la puesta del sol, con menos de un lux de iluminación ambiental.
Los dos vehículos de prueba tenían sus luces bajas encendidas durante las pruebas. Los objetivos ficticios estacionarios para niños y adultos utilizados en las pruebas fueron compatibles con los protocolos de prueba actuales prescritos por organizaciones como IIHS y Euro NCAP.
Los escenarios en los que se evaluaron los vehículos incluyeron:
-
Adulto que cruza con un 50 % de superposición (en el centro del ancho del vehículo de prueba)
-
Cruce de adulto con un 25 % de superposición
-
Cruce de niños con un 50 por ciento de superposición
-
Cruce de niños al 25 %, adulto al 75 %, 10 pies detrás del niño
-
Cruce de adulto en la esquina del lado del conductor
-
Adulto caído con un 50 % de superposición
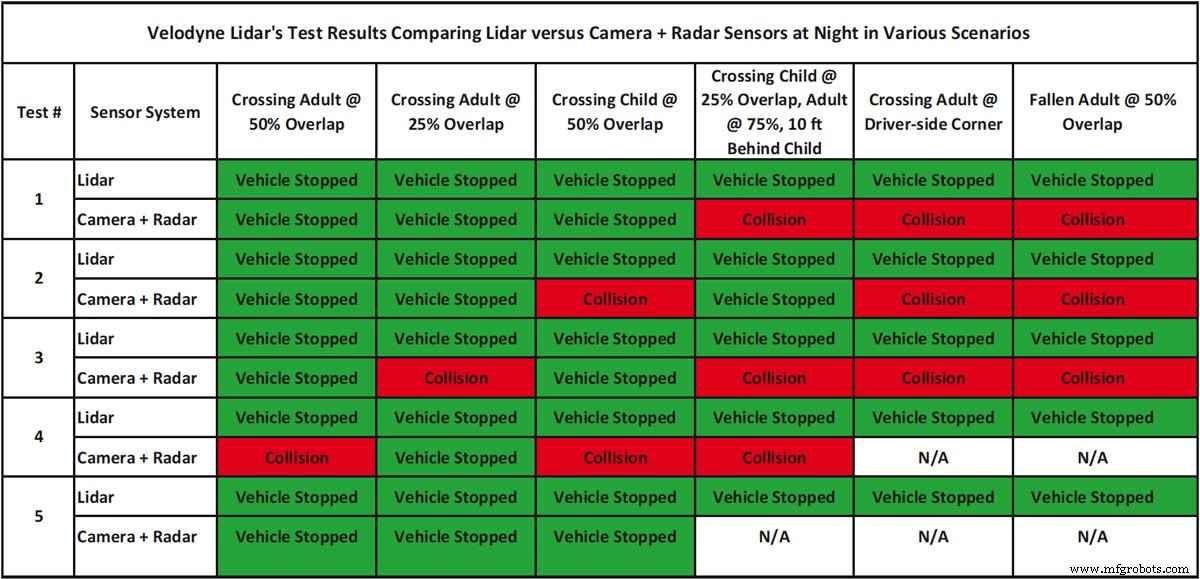
Velodyne probó ambos vehículos en cada escenario cinco veces, o hasta que el vehículo chocó con el objetivo tres veces, para minimizar el daño a los objetivos y vehículos.
Los resultados de las pruebas nocturnas respaldan los hallazgos de AAA y NHTSA de que las cámaras y los radares
Los sistemas PAEB fallan con frecuencia en condiciones de oscuridad. La prueba encontró que la tasa de fallas es especialmente evidente en escenarios que involucran a un niño, más de un peatón, un adulto en la esquina del vehículo o un adulto caído frente al vehículo.
Por el contrario, el sistema PAEB basado en LiDAR de Velodyne, equipado con el sensor Velarray H800 de Velodyne y el software Vella™, se detuvo con éxito a tiempo para evitar un bloqueo cinco de cada cinco veces en cada escenario probado. Estos componentes de hardware y software se están desarrollando para cumplir con los requisitos de seguridad funcional automotriz definidos en el estándar ISO-26262. Combinando Vella y Velarray, la solución PAEB de Velodyne está diseñada para conducción urbana, suburbana y en autopista hasta 80 mph.
Conclusión
Dado que se ha demostrado que las condiciones nocturnas oscuras son peligrosas para los peatones, Velodyne propone que las organizaciones de evaluación de vehículos amplíen las pruebas PAEB para incluir condiciones de luz ambiental de menos de un lux. Las pruebas realizadas por AAA y NHTSA demuestran que el rendimiento nocturno representa una gran oportunidad de mejora en los sistemas PAEB actuales. Las pruebas muestran que una solución basada en LiDAR es eficaz y está lista para su implementación.
Este artículo fue escrito por David Hall, fundador y presidente ejecutivo de la junta, Velodyne LiDAR (San José, CA). Para obtener más información, comuníquese con el Sr. Hall en Esta dirección de correo electrónico está protegida contra spambots. Necesita habilitar JavaScript para verlo. o visita aquí .
Sensor
- Por qué la excelencia en confiabilidad es imperativa para la seguridad
- Consejos de seguridad en el lugar de trabajo para maquinistas CNC
- Desarrollo de una nueva era para una seguridad alimentaria más inteligente
- Consejos de seguridad para mover maquinaria pesada
- Recordatorios de seguridad para operar montacargas
- 5 consejos de seguridad para preparar equipos pesados
- ¡Alto! 3 consejos para la seguridad de las grúas aéreas
- 3 consejos de mantenimiento de seguridad para polipastos de cadena de grúa
- 7 consejos de seguridad inteligentes para plataformas marinas
- 9 consejos de seguridad efectivos para el lugar de trabajo industrial
- Crear procedimientos de seguridad para trabajadores y técnicos