


El enfoque hace que los agentes no tripulados sean autosuficientes
Los investigadores han desarrollado un enfoque que permite que un vehículo aéreo no tripulado (UAV) de ala giratoria aterrice en un vehículo terrestre no tripulado (UGV) en movimiento sin la ayuda de GPS y se recargue antes de continuar. Los equipos de agentes aéreos y terrestres autónomos permitirán operaciones en entornos de búsqueda y rescate que son demasiado remotos o peligrosos para los humanos pero que a menudo requieren una amplia infraestructura de comunicación y posicionamiento.
Una función crítica de los UAV es aterrizar de forma autónoma en vehículos terrestres estáticos y en movimiento, recargar y luego despegar para realizar nuevas misiones. Los UAV no podrán confiar en el GPS, ya que se interrumpe fácilmente, por lo que estos comportamientos deberán realizarse utilizando otras fuentes, como la visión a bordo.
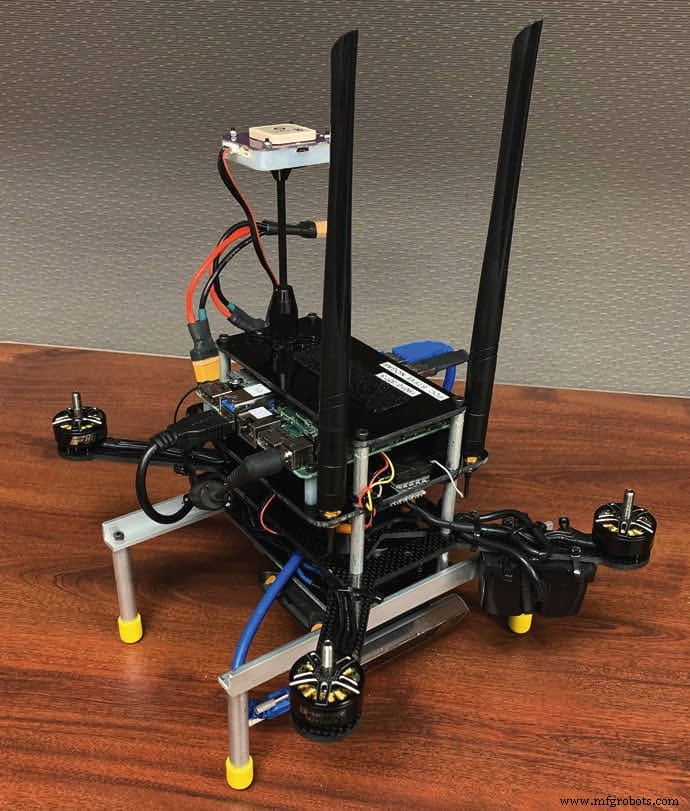
Los investigadores realizaron cálculos a bordo del vehículo utilizando sensores y computadoras de bajo costo. Además, no se produjeron comunicaciones entre el UAV y el UGV. El equipo realizó simulaciones de software en el circuito y experimentos al aire libre y demostró que el algoritmo es efectivo para realizar maniobras de aterrizaje. Usando un quadrotor pequeño hecho a la medida y un UGV a velocidades de jogging, los investigadores experimentaron con aterrizajes.
El trabajo combina comportamientos denegados por GPS y un comportamiento probado experimentalmente. Utiliza localización basada en la visión con odometría inercial visual, un marcador único en la parte superior del vehículo terrestre diseñado para esta aplicación, y comportamientos y control a bordo. Además, estos comportamientos se realizaron a bordo de un pequeño UAS con limitaciones computacionales significativas.
El marcador personalizado en la parte superior del vehículo terrestre está diseñado específicamente para la tarea de aterrizaje. Contiene marcadores más pequeños dentro del marcador más grande que aún se pueden ver incluso cuando la cámara se acerca al marcador. El enfoque podría reducir la dependencia del marcador fiduciario en la parte superior del vehículo terrestre y reemplazarlo con inteligencia artificial que reconozca el vehículo en el que quiere aterrizar.
Sensor
- ¿Qué es un alternador?
- Agentes de software portátiles:un enfoque "Ricitos de oro" para la conectividad de IoT
- ¿Qué hace a un innovador?
- Detector de aerosol de agente rápido para agentes biológicos
- EV vs. ICE:¿Cómo difiere el diseño del arnés de cables?
- El adaptador hace que todos los auriculares sean inteligentes
- Vehículo aéreo no tripulado (UAV) de gran altitud para monitorear parámetros meteorológicos
- Puerto de carga para enjambres de drones autónomos
- ¿Está el público listo para un vehículo autónomo de nivel 4?
- ¿Qué es una conexión a tierra del chasis?
- Varilla de tierra de tungsteno