


Introducción a los transformadores diferenciales variables lineales (LVDT)
¿Busca una breve introducción a los LVDT? Este artículo explicará los conceptos básicos de LVDT, incluida la estructura, el circuito, la función de transferencia, el rango lineal, la sensibilidad y más.
El transformador diferencial variable lineal (LVDT) es un transductor electromecánico que detecta el desplazamiento mecánico de un núcleo y produce un voltaje CA proporcional en la salida. Alta resolución (infinita en teoría), alta linealidad (0.5% o mejor), alta sensibilidad y cero fricción mecánica son algunas de las características importantes de los dispositivos LVDT.
En este artículo, veremos la estructura y los principios de funcionamiento de los LVDT. También examinaremos tres parámetros importantes de estos sensores:rango lineal, error de linealidad y sensibilidad.
Estructura de un LVDT
La Figura 1 muestra la vista en corte y el modelo de circuito de un LVDT básico. Consiste en un devanado primario acoplado a dos devanados secundarios a través de un núcleo móvil. A medida que se mueve el núcleo magnéticamente permeable, el acoplamiento magnético entre el primario y cada uno de los devanados secundarios cambia en consecuencia. Esto produce señales de voltaje dependientes de la posición a través de los dos devanados que se pueden usar para determinar la posición de un objeto.
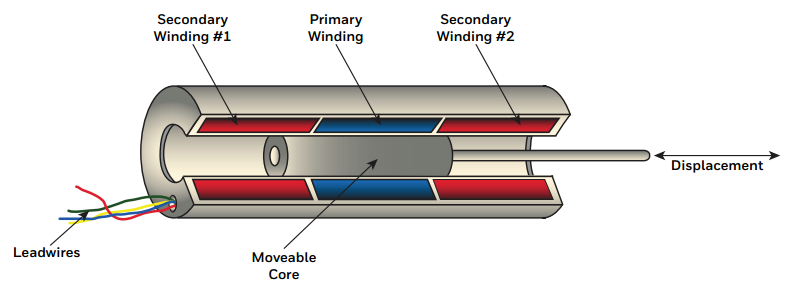
Figura 1 (a). Vista en corte de un LVDT. Imagen cortesía de Honeywell
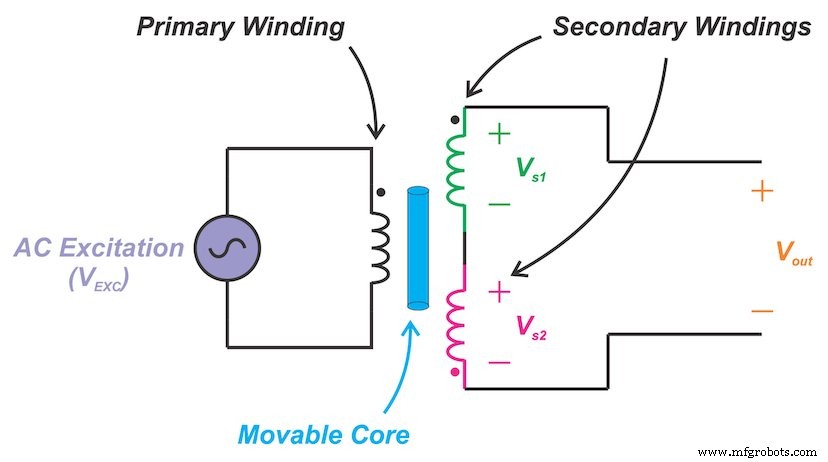
Figura 1 (b). Modelo de circuito de un LVDT
Los dos devanados secundarios son opuestos en serie, lo que significa que están conectados en serie pero enrollados en direcciones opuestas. El núcleo, típicamente a través de una varilla no ferromagnética, se adhiere al objeto cuyo movimiento se está midiendo y el conjunto de la bobina se fija típicamente a una forma estacionaria.
¿Cómo funciona?
La Figura 2 muestra cómo un núcleo perfectamente centrado produce idealmente una salida cero. La entrada es excitada por un voltaje de CA de la frecuencia apropiada (V EXC ). Dado que los dos secundarios se enrollan simétricamente en los dos lados de la bobina primaria, un núcleo centrado conduce a un acoplamiento magnético igual del primario a los dos secundarios. Con los devanados secundarios opuestos en serie, se inducirán voltajes iguales con polaridades opuestas a través de los dos secundarios (V s1 =-V s2 ). Por lo tanto, los voltajes de los dos devanados se cancelarán y tendremos una salida general de cero (V out =0).
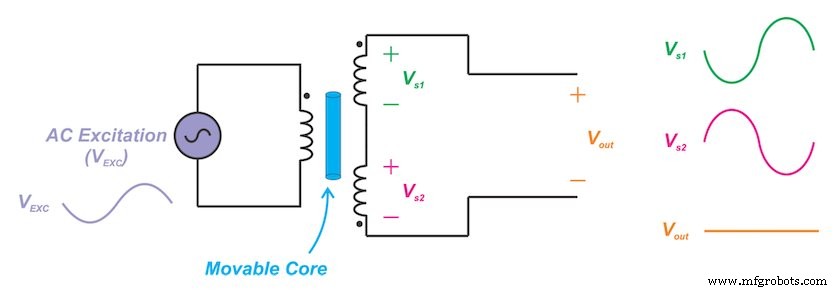
Figura 2. LVDT con un núcleo perfectamente centrado
Cuando el núcleo se desplaza hacia arriba como se muestra en la Figura 3, el acoplamiento entre el primario y el primer secundario se vuelve más fuerte. Esto conduce a un voltaje de CA mayor en el primer secundario en comparación con el segundo secundario (| V s1 |> | V s2 |) y una salida distinta de cero (V out ). Tenga en cuenta que la salida está en fase con V s1 pero su amplitud es relativamente menor.
Con el ejemplo que se muestra en la Figura 3, la salida debería estar idealmente en fase con V EXC cuando el núcleo experimenta un desplazamiento hacia arriba.
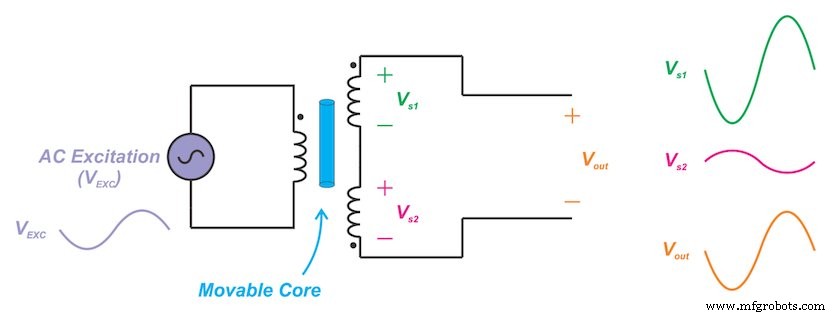
Figura 3. LVDT con el núcleo movido hacia arriba
Las formas de onda típicas para el desplazamiento hacia abajo del núcleo se muestran en la Figura 4.
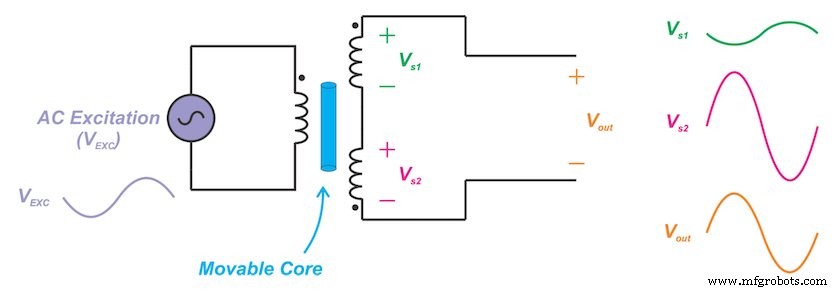
Figura 4. LVDT con el núcleo movido hacia abajo
En este caso, el acoplamiento magnético entre el primario y el segundo secundario aumenta dando lugar a | V s2 |> | V s1 |. Como puede ver, tendremos un V out distinto de cero que es idealmente 180 ° fuera de fase con respecto al voltaje de excitación.
Función de transferencia
La Figura 5 muestra la función de transferencia de un LVDT típico. El eje x es el desplazamiento del núcleo desde el centro. El eje y es la amplitud del voltaje de CA de salida.
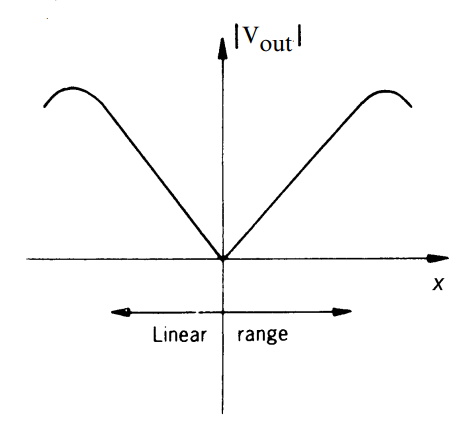
Figura 5. Imagen cortesía de Ramón Pallás-Areny y John G. Webster, Sensores y acondicionamiento de señales
En el origen (x =0), la salida es idealmente cero. A medida que el núcleo se mueve fuera del centro en cualquier dirección, la amplitud de la salida aumenta linealmente con el desplazamiento del núcleo. Tenga en cuenta que midiendo solo la amplitud de la salida, no podemos determinar si el núcleo está desplazado hacia la izquierda o hacia la derecha. Necesitamos saber tanto la amplitud como la fase de la salida.
Rango lineal
Como se muestra en la Figura 5, un LVDT exhibe una función de transferencia lineal solo en un rango limitado del desplazamiento del núcleo. Esto se especifica como el rango lineal del LVDT.
¿Por qué el dispositivo deja de tener una relación lineal más allá de este rango?
Podemos imaginar que, cuando el desplazamiento del núcleo desde la posición nula supera un cierto valor, el flujo magnético que llega a acoplarse al núcleo desde el devanado primario se reduce. Esto, en consecuencia, conduce a una reducción en la tensión que aparece a través del devanado secundario correspondiente. La distancia máxima que el núcleo puede viajar desde su posición nula mientras tiene una función de transferencia lineal se conoce como desplazamiento a escala completa.
Hay disponibles amplios rangos de LVDT que cubren rangos de desplazamiento desde ± 100 μm a ± 25 cm. Los LVDT capaces de medir rangos más grandes también se utilizan en entornos de laboratorio, industriales y sumergibles.
Error de linealidad
El gráfico de la salida LVDT frente al desplazamiento del núcleo no es una línea recta perfecta incluso en el rango lineal. La salida puede desviarse ligeramente de la línea recta construida para tener el mejor ajuste a los datos de salida.
Un mecanismo que puede conducir a la no linealidad en el rango lineal nominal del dispositivo es la saturación del material magnético. Esto puede producir el tercer componente armónico incluso cuando el núcleo está en la posición nula. Este armónico se puede suprimir aplicando un filtro de paso bajo a la salida LVDT.
La desviación máxima de la salida LVDT del ajuste de línea recta esperado se considera como el error de linealidad. El error de linealidad se expresa típicamente como un porcentaje de +/- de la salida de rango completo. Por ejemplo, el LVDT E-100 de Measurement Specialties, Inc., tiene un error de linealidad máximo de ± 0.5% del rango de escala completa.
Sensibilidad
La sensibilidad o relación de transferencia nos permite relacionar el voltaje de salida con el desplazamiento del núcleo. Para determinar la sensibilidad, energizamos el primario al nivel de unidad recomendado (3 V RMS para E-100 LVDT) y mueva el núcleo fuera de la posición nula mediante el desplazamiento a escala completa. Ahora, medimos los voltajes en los dos devanados secundarios para encontrar el voltaje de salida general (V out ). Sustituyendo estos valores en la siguiente ecuación, podemos encontrar la sensibilidad LVDT:
\ [Sensibilidad =\ frac {V_ {out}} {V_ {Primary} \ times (Core ~ Displacement)} \]
La sensibilidad generalmente se especifica en términos de salida de milivoltios por voltio de excitación por milésimas de pulgada de desplazamiento del núcleo (mV / V / mil). Por ejemplo, la sensibilidad del E-100 es de 2,4 mV / V / mil. Teniendo sensibilidad, podemos determinar la ganancia requerida del circuito de acondicionamiento de señal.
Un LVDT es un transductor electromecánico que se puede utilizar para detectar el desplazamiento mecánico de un objeto. Alta resolución (infinita en teoría), alta linealidad (0.5% o mejor), alta sensibilidad y cero fricción mecánica son algunas de las características importantes de los dispositivos LVDT.
Sensor
- Introducción a la estereolitografía (SLA)
- Introducción a la aleación de titanio
- Introducción a los circuitos de CC
- Introducción a los circuitos de CA
- Introducción a SPICE
- Ámbito variable de C#
- ¿Qué es un diferencial?
- ¿Qué es el fluido diferencial?
- Asignaciones de Verilog
- C - Variables
- Un sistema basado en un reloj inteligente detecta la tensión de calor