


Los conjuntos de chips de radar de imágenes 4D mejoran la identificación de objetos
El radar se está calentando, especialmente con los avances que prometen identificación / clasificación de objetos y una mayor resolución de latitud, algo que los radares tradicionales no podían hacer. Con estas nuevas innovaciones, los radares se están convirtiendo en el sensor más buscado entre los fabricantes de automóviles y los Tier Ones que desarrollan vehículos altamente automatizados.
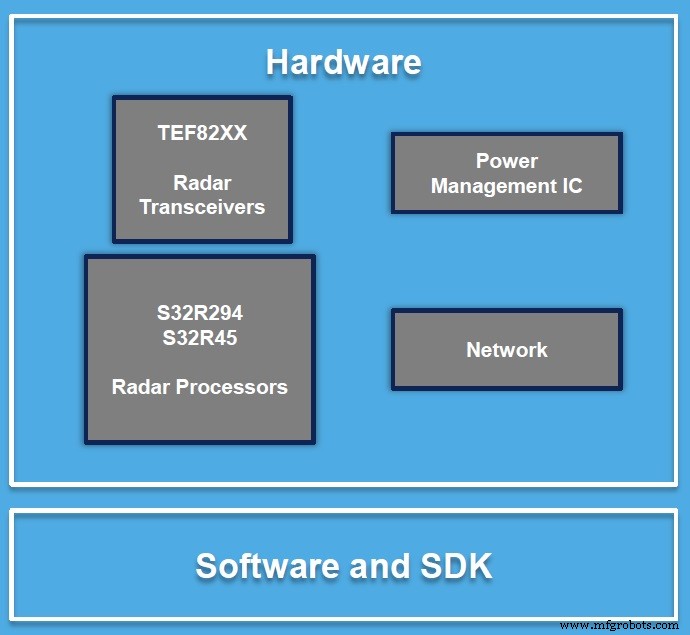
Solución de sistema de radar (Fuente:NXP)
Respondiendo a las altas expectativas de la industria automotriz, NXP Semiconductors anunció que está probando un conjunto de nuevos conjuntos de chips de sensores de radar, que consisten en el procesador de radar S32R45 de la compañía y los nuevos transceptores de 77GHz llamados TEF82xx.
NXP, que fue pionero en los radares RF CMOS con su primer chip de radar llamado "Dolphin" hace cinco años, ha sido un proveedor líder de soluciones de radar para automóviles.
Los sensores de imágenes 4D de NXP pueden medir no solo el alcance y la velocidad, sino también la "elevación, la dirección y el ángulo de llegada, al tiempo que identifican objetos con una resolución mucho más alta", explicó Torsten Lehmann, vicepresidente ejecutivo y gerente general de procesamiento de radiofrecuencia, durante una entrevista con EE Times . Con el radar de imágenes 4D que puede comprender no solo los planos horizontales sino también verticales, un vehículo puede, por ejemplo, determinar si debe conducir "debajo" o "sobre" un objeto, dijo Lehman.
“Imagine una escena en la que un vehículo circula a 80 kilómetros por hora en una carretera, mientras que una motocicleta, un objeto pequeño con baja reflectividad, viene por detrás a 200 kilómetros por hora”, dijo. A diferencia de las cámaras y los lidars, estos nuevos radares mejorados pueden identificar la motocicleta, inicialmente muy alejada, y reconocer que estos dos objetos se mueven a dos velocidades diferentes, explicó Lehmann.

(Fuente:NXP)
Hasta ahora, el radar ha sido el único sensor capaz de operar a más de 300 metros, reconociendo objetos que corren a altas velocidades. Ni las cámaras ni los lidars pueden manejar tanta distancia y velocidad.
Con la aparición de radares de imágenes de mayor resolución, muchos proveedores de radares, incluido NXP, están ansiosos por elevar a los radares como el único sensor de alta velocidad capaz de funcionar en las peores condiciones climáticas y de iluminación.
Escalabilidad
NXP no es el único que habla del radar de imágenes 4D. Continental anunció en septiembre pasado que está utilizando FPGA de Xilinx para implementar el primer radar de imágenes 4D listo para producción de la industria automotriz, que se espera que se envíe en vehículos de pasajeros en 2021.
Dada la experiencia de producción en volumen de NXP con transceptores CMOS RF de 77 GHz y su procesador de radar S32R45, NXP afirma que su conjunto de chips de radar de imágenes 4D puede reducir sustancialmente el costo y la eficiencia energética en comparación con la implementación de FPGA de uso general. NXP, sin embargo, se abstuvo de especificar el grado de reducción de costo / energía.
Phil Magney, fundador y presidente de VSI Labs, nos dijo:“Hemos estado siguiendo de cerca este espacio durante algunos años. Irónicamente, la primera vez que me enteré fue en una presentación de NXP hace algunos años. En ese momento, se presentó como un competidor potencial de LIDAR, ya que los nuevos radares podrían producir una nube de puntos ”.
Obviamente, NXP ha estado planeando el lanzamiento de su radar de imágenes 4D durante algún tiempo.
Pero el tono de NXP está cambiando. En lugar de simplemente hablar sobre su capacidad para producir nubes de puntos, el énfasis de la empresa ahora se ha trasladado a la escalabilidad ofrecida por un conjunto de sus nuevas soluciones de radar.
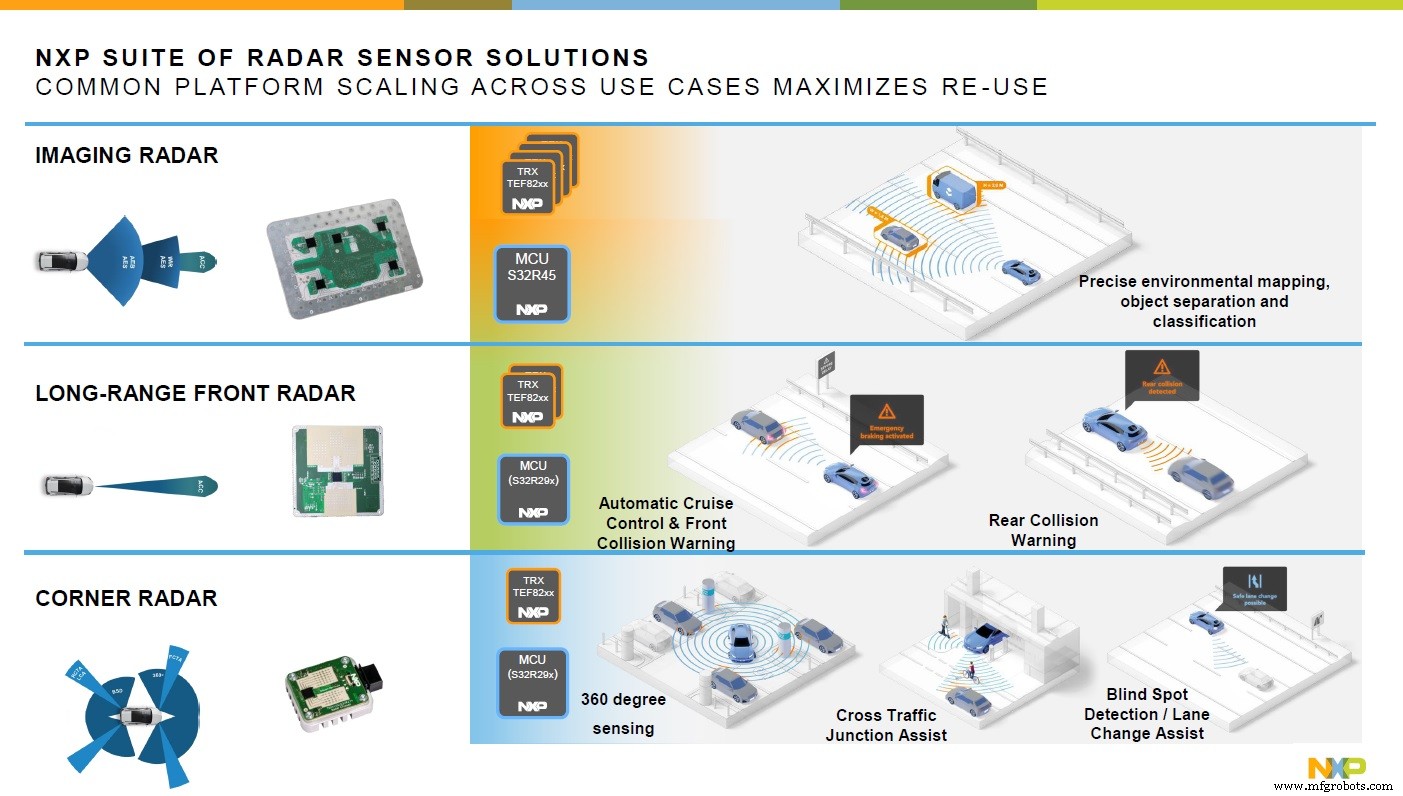
NXP ahora promociona "una plataforma común que se adapta a diferentes casos de uso", que van desde el radar de esquina y el radar frontal de largo alcance hasta el radar de imágenes. Esto es importante para una industria que busca tecnologías para superar los requisitos del Programa de evaluación de vehículos nuevos (NCAP) que exigen un mejor rendimiento en el punto ciego y las funciones de frenado automático de emergencia. Si bien NCAP no especifica las tecnologías de sensores preferidas, los fabricantes de automóviles, presionados para cumplir con los requisitos de NCAP, están buscando mejores tecnologías de radar que puedan detectar objetos en las esquinas y en el frente, explicó Lehmann.
haga clic para ver la imagen a tamaño completo
(Fuente:NXP)
Para la detección de puntos ciegos y la asistencia de carril en vehículos de nivel 1 y 2, funciona una combinación del transceptor único TEF82xx de NXP y el procesador de radar S32R45. La adición del control de crucero automático y la advertencia de colisión delantera y trasera a los automóviles L2 y L3 requeriría dos transceptores en lugar de uno. Para la separación y clasificación de objetos que exigen los vehículos autónomos L4 y L5, los OEM pueden combinar cuatro transceptores en cascada con un procesador de radar.
La clave es que a lo largo de la transición hacia una mayor automatización, los fabricantes de automóviles que deben abordar diversas marcas y modelos deberían poder utilizar una única plataforma diseñada para reutilizar software y hardware.
Transición al radar de imágenes 4D
La evolución de los radares automotrices, sin embargo, se confunde con la jerga de marketing.
Los radares tradicionales, a veces llamados 2D, se convirtieron en radares de imágenes. “El radar de imágenes crea esencialmente una matriz mediante la cual la densidad de las mediciones aumenta drásticamente”, explicó Magney. “El radar 2D tradicional es tosco en comparación y solo produce un punto por objeto. Pero un radar de imágenes produciría muchos puntos para comprender mejor lo que se está rastreando ”. En resumen, señaló, "El radar de imágenes produce una resolución vertical mediante la cual el radar tradicional funciona en un solo plano".
Entonces, ¿en qué se diferencian los radares de imágenes 3D y 4D?
“Creo que el tiempo se está utilizando en la cuarta dimensión. También he escuchado esto de algunas otras compañías y así es como lo usan ”, señaló Magney. Pero agregó:“Honestamente, 4D es más publicidad publicitaria que cualquier otra cosa, porque el elemento de tiempo se deriva de Doppler. Entonces, si este fuera el caso, entonces, el 2D tradicional podría llamarse 3D ".
En otras palabras, el elemento tiempo siempre ha sido fundamental para lo que ofrecen los radares. Cuando se le hizo la misma pregunta, Lehman de NXP señaló que el cuarto elemento del sensor de imágenes 4D es la "resolución lateral". El radar de imágenes 4D capta mejor el entorno y determina si un vehículo puede volar por debajo o por encima de un objeto.
Resolución de latitud
"Una resolución de latitud más alta" se traduce en una mayor resolución vertical, señaló Magney. "Esto en sí mismo es una de las características más importantes".
Esta discusión evoca el caso de Joshua Brown. El sedán Tesla Model S de Brown mató al conductor, chocando con un camión con remolque que se cruzaba en su camino en la autopista 27A de los EE. UU. En Florida en mayo de 2016. Se informa ampliamente que el Tesla, equipado con cámaras y un radar 2D tradicional, asumió que el automóvil podría pasar por debajo del plataforma gigante, y se dirigió directamente hacia ella.

La foto muestra el lado derecho del semirremolque. El área en un óvalo rojo destaca el daño por colisión del Tesla S. de Joshua Brown (Fuente:Junta Nacional de Seguridad en el Transporte)
¿Podría un sensor de imágenes 4D haber evitado un accidente tan fatal? Magney dijo:“Sí, este tipo de radar no sería propenso a falsos positivos provenientes del radar tradicional. Y no habría permitido el accidente de Tesla ".
Procesamiento de radar y transceptores de mayor rendimiento
El nuevo TEF82xx de NXP, 75 mm x 75 mm, se basa en su RFCMOS de segunda generación basado en tecnología de proceso de 40 nm. La compañía afirma que puede duplicar el rendimiento de RF para una mejor detección, en comparación con la versión anterior.
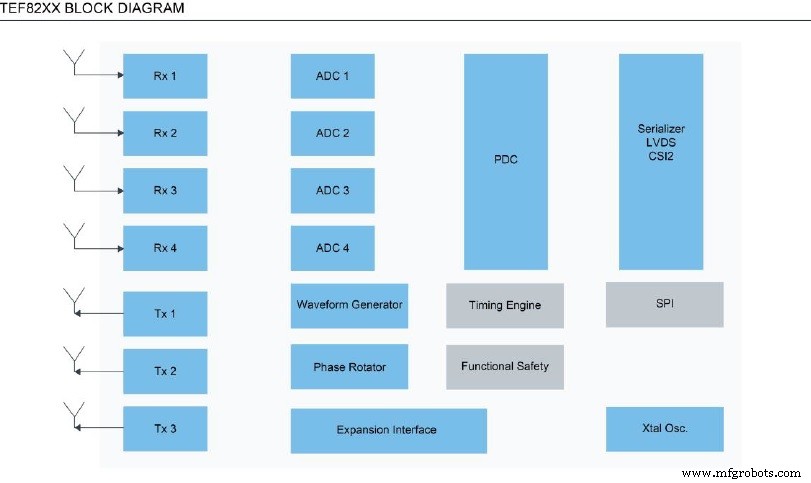
El nuevo chip transceptor también ofrece una reducción de ruido de fase 4X alrededor del objetivo, lo que permite ofrecer una mejor separación de objetos. Viene con un rotador de fase de 6 bits para aplicaciones de dirección de haz y compatibilidad con MIMO de modulación avanzada.
El nuevo radar S32R45 de NXP se basa en un proceso FinFET de 16 nm. Ofrece soporte de transceptor en cascada de hasta 4X para "mapeo ambiental preciso y comprensión mejorada de la escena" en vehículos L4 y L5, afirmó la compañía.
haga clic para ver la imagen a tamaño completo
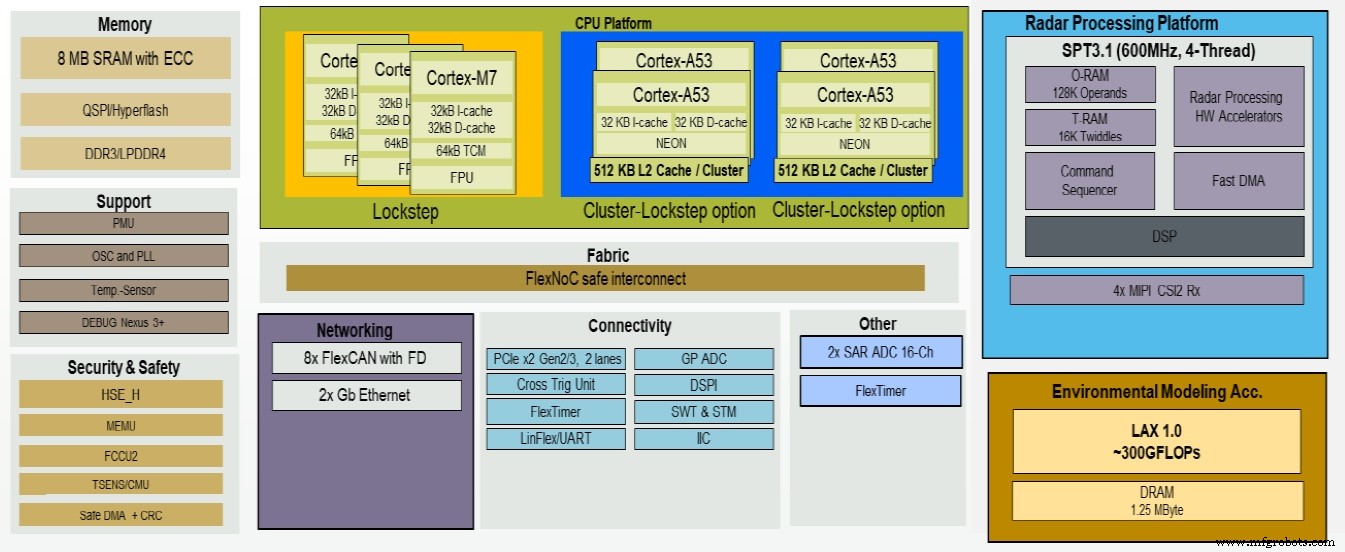
Diagrama de bloques S32R45. (Fuente:NXP)
Es importante tener en cuenta que el S32R45 es capaz de realizar nuevas aceleraciones de radar. Más específicamente, ofrece un nuevo "acelerador de radar de álgebra lineal" que proporciona un rendimiento de hasta 64X en comparación con un núcleo ARM A53, según NXP. Esto se traduce en ejecutar "algoritmos de dirección de llegada (DoA) de súper resolución y operación MIMO real incluso en condiciones climáticas adversas", afirmó NXP.
Debate renovado:lidar frente a radar
NXP afirma que su nuevo radar de imágenes 4D ofrece una resolución angular inferior a 1 grado. Pero, ¿cómo se compara con lidar?
Lehman señaló:"Si está hablando de un LIDAR de alto rendimiento, como el tipo giratorio mecánico utilizado por Waymo, puede producir nubes de puntos muy granulares, ya que ofrece una resolución angular inferior a 0,1 ° o 0,5 °". Añadió, pero tal LIDAR es "voluminoso y cuesta miles de dólares".
Magney observó:"Existe el rumor de que Tesla está considerando el radar de imágenes para la plataforma del modelo 3 y esto sería una buena medida, porque proporciona una mejor respuesta para no usar lidar". El desmontaje de System Plus Consulting reveló que Tesla usó el radar 2D de Continental, según lo informado por EE Times .
Sin embargo, según Magney, Tesla ha cambiado de Continental a Bosch para un mayor alcance. Explicó que ambos son radares 2D con las limitaciones de los radares tradicionales. “En lo que a mí respecta, sería astuto un paso hacia el radar de imágenes de Tesla. Comprenda que el radar de imágenes produce una nube de puntos. Aunque tiene una resolución más baja que Lidar, [todavía] es una gran mejora con respecto al radar tradicional ”, dijo Magney.
Sin embargo, en resumen, Magney enfatizó:"No voy a tirar el lidar debajo del autobús todavía".
En su opinión, el lidar tiene una gran ventaja sobre el radar ahora, aunque esa brecha podría estar cerrándose con los nuevos radares. “Una de las aplicaciones clave de LIDAR es su capacidad para realizar una localización relativa en un mapa base. Esto es vital para la robotaxis urbana y los transbordadores y no creo que pueda desplazar al lidar para esta tarea ".
Magney concluyó:“Lidar no desaparecerá incluso cuando llegue el radar 4D. En lugar de desplazar al lidar, se podría decir que los nuevos radares superan algunas de las limitaciones del radar tradicional ”.
Disponibilidad
El nuevo conjunto de chips de radar de NXP, el muestreo de hoy, se producirá en volumen en 2021. El radar de esquina, el radar frontal y el radar de imágenes 4D se lanzarán durante varios meses en 2021, pero los tres estarán disponibles en la segunda mitad, dijo Lehman. Se negó a comentar sobre los precios.
>> Este artículo se publicó originalmente el nuestro sitio hermano, EE Times.
Incrustado
- Clase y objeto de C#
- Clase única de Java
- Apacer presenta una nueva identificación de productos industriales
- Microchip:la solución basada en FPGA PolarFire permite imágenes y videos 4K con el factor de forma más pequeño
- Kymati desarrolla soluciones de radar personalizadas
- Se estrena el procesador de radar de imágenes automotrices de 30 fps
- El chip de radar de baja potencia utiliza redes neuronales con picos
- Manhattan Skyline:COM ARM compacto con NXP i.MX 8MM
- congatec:nuevo módulo SMARC con mini procesador NXP i.MX 8M
- El kit proporciona la plataforma de desarrollo mmWave
- Java - Serialización