


¿Qué es un manipulador robótico? Una guía
Todas las partes de un robot desempeñan un papel en sus operaciones y determinan el tipo de tareas para las que se puede utilizar. Por lo tanto, tener un conocimiento profundo de estas piezas sería el primer paso para elegir el robot industrial adecuado. para sus necesidades. Si bien hay muchas partes a considerar, quizás sería beneficioso comenzar con una de las claves; un manipulador robótico.
Un robot es una máquina que está programada para realizar automáticamente tareas específicas de manera predecible. Para hacer esto, tiene que manipular objetos y moverlos o impactarlos mediante acciones como soldar o perforar. Es este manejo o procedimientos realizados en objetos lo que se conoce como manipulación robótica. Por lo tanto, esta definición nos da contexto para definir manipuladores robóticos.
Un manipulador robótico es una estructura en forma de brazo unida al cuerpo de un robot y se utiliza para ejecutar tareas. Un robot sin manipulador sería el equivalente a una persona que realiza una tarea con las manos atadas a la espalda, simplemente no es viable. De hecho, es por esta razón que los manipuladores robóticos también se conocen como brazos robóticos. Fuente:Kawasaki
Los robots manipuladores consisten en una serie de articulaciones y enlaces fusionados en su estructura interior. Desde el exterior, el brazo manipulador robótico solo parece estar montado en el robot. Sin embargo, la serie de articulaciones y enlaces se adentran más en el cuerpo del robot para unirlos. Esto asegura que el robot y el manipulador trabajen juntos en movimientos fluidos coordinados.
Los enlaces son componentes rígidos que fusionan diferentes partes de un robot. Si bien su rigidez proporciona una estructura firme, dificultaría el movimiento de las partes del robot durante las tareas. Como resultado, se agregan juntas a los enlaces para facilitar la flexibilidad. Las articulaciones son componentes móviles que se deslizan entre sí para facilitar el movimiento lineal, giratorio o revolucionario de las piezas del robot. Están construidos y funcionan de la misma manera que un codo o una rodilla humanos. Fuente:www. brainkart.com
Los tipos y la cantidad de articulaciones que tiene un robot manipulador determinan sus grados de libertad, la forma de su área de trabajo y cómo se puede aplicar. Esto, a su vez, determina cómo se categoriza un robot. A modo de ilustración, examinemos los diferentes tipos de robots y las estructuras de sus manipuladores robóticos.
Robot cartesiano- sus manipuladores están unidos mediante 3 juntas prismáticas que son perpendiculares entre sí y solo proporcionan movimientos de deslizamiento lineales. Como resultado, un robot cartesiano se clasifica como un robot de 3 ejes y tiene un entorno de trabajo geométrico.
Robot Polar- el brazo y el cuerpo de un robot polar se unen mediante una articulación giratoria. Este tipo de articulación permite movimientos circulares que permiten que el brazo del robot polar se mueva dentro de los 3 ejes en un sistema de geometría polar.
Robot cilíndrico- un brazo robótico cilíndrico funciona mediante una articulación giratoria en la base y una articulación lineal que le permite moverse a lo largo del eje vertical. La configuración de estas uniones permite que el manipulador se alargue y retraiga, pero su área de trabajo todavía está bastante limitada a una pequeña forma cilíndrica.
Robot SCARA - las articulaciones en un robot SCARA son giratorias y facilitan sus movimientos a lo largo de los ejes XY mientras permanecen rígidas en el eje Z. Debido a que las juntas son un plano horizontal, los robots SCARA tienen amplios espacios de trabajo en forma semicircular.
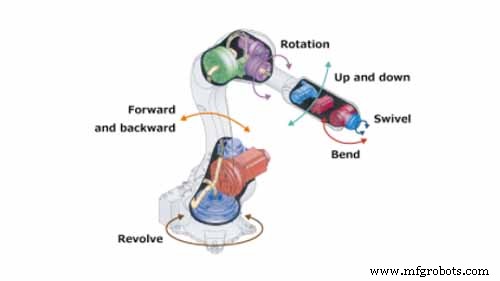
Robot articulado - un robot articulado tiene los manipuladores más flexibles entre todos los demás robots. El brazo del manipulador robótico está vinculado al cuerpo del robot mediante una articulación giratoria, mientras que el codo y otras partes del brazo están unidos mediante articulaciones revolucionarias. Las articulaciones giratorias permiten que el brazo gire, se incline y gire, creando así un robot de 6 ejes.
La flexibilidad de varios manipuladores robóticos se puede aprovechar para automatizar procesos en diferentes industrias. Ejemplos de tal aplicación incluyen:
Cirugía robótica- en esta aplicación, un manipulador robótico articulado está equipado con instrumentos quirúrgicos como efectores finales. Es controlado de forma remota por un cirujano para ejecutar maniobras quirúrgicas.
Elija y coloque - esta es una aplicación industrial común en la que se utilizan manipuladores robóticos para tareas repetitivas de recogida y colocación, como embalar mercancías.
Ensamblaje de PCB - en este caso, un manipulador robótico reemplaza las manos de un trabajador humano para ensamblar micropartes en una placa PCB con alta precisión y velocidad.
Es seguro decir que el significado del manipulador robótico en robótica va más allá de la función. Va más allá para definir la estructura y cómo se puede aplicar un robot. Manipuladores de calidad de un fabricante de brazos robóticos de renombre por lo tanto, sería una inversión valiosa para cualquiera que se aventure en la robótica. 
Tabla de contenido
¿Qué es la manipulación robótica?

¿En qué consisten los manipuladores de robots?
Manipuladores de robots en diferentes robots

Aplicaciones de manipuladores robóticos
Conclusión
Robot industrial
- Qué industrias y empresas utilizan robots
- Robots industriales:la guía definitiva
- ¿Qué es la automatización robótica de procesos y sus ventajas?
- La guía definitiva sobre soldadura robótica en la fabricación
- Brazo robótico:¿Cómo se fabrica?
- Robótica en la fabricación de automóviles
- Robot Warehouse System:qué es y cómo se usa
- Automatización y robótica:¿Cuáles son sus diferencias?
- M2M o comunicación máquina a máquina, ¿qué es?
- La termografía, qué es y para qué sirve
- Industria 4.0, ¿En qué consiste?