


Receptor DIY Arduino RC para modelos RC y proyectos Arduino
En este tutorial aprenderemos a hacer un receptor RC basado en Arduino. Desde que construí mi transmisor DIY Arduino RC en uno de mis videos anteriores, recibí muchas solicitudes de ustedes para hacer un receptor dedicado para él, así que aquí está.
Puede ver el siguiente video o leer el tutorial escrito a continuación.
Ahora estos dos dispositivos pueden comunicarse fácilmente y podemos usarlos para controlar muchas cosas de forma inalámbrica. Explicaré cómo funciona todo a través de algunos ejemplos. En el primer ejemplo, usaremos este receptor Arduino RC para controlar un automóvil simple que consta de dos motores de CC. En el segundo ejemplo, le mostraré cómo controlar motores sin escobillas y servos, que son componentes comunes que se encuentran en muchos aviones comerciales RC, barcos, automóviles, etc. Si sabemos cómo controlarlos, podemos modificar y controlar fácilmente muchos modelos RC con nuestro propio transmisor Arduino personalizado.
Como tercer ejemplo, le mostraré cómo modifiqué y usé este sistema RC basado en Arduino para controlar un automóvil RC comercial.
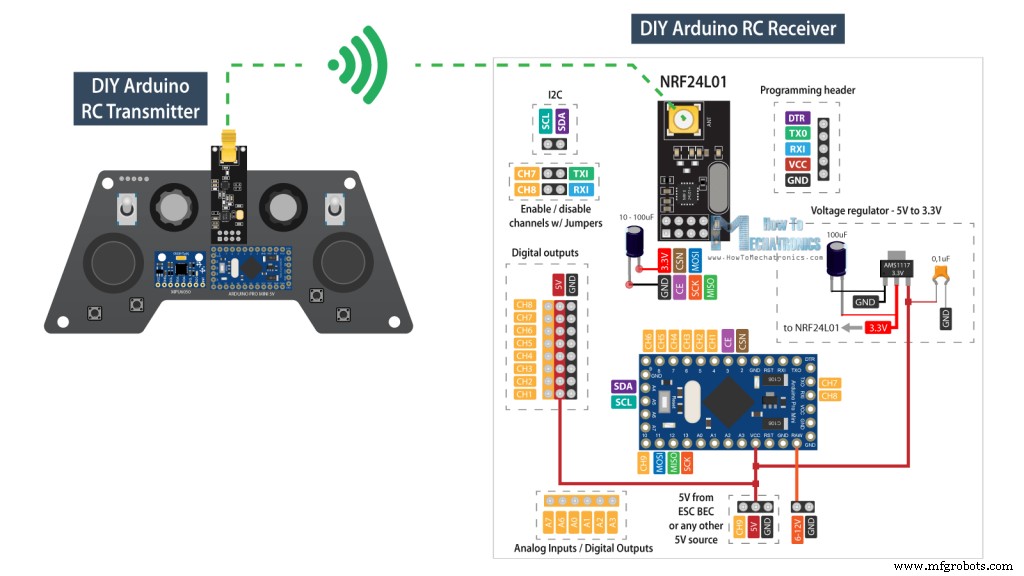
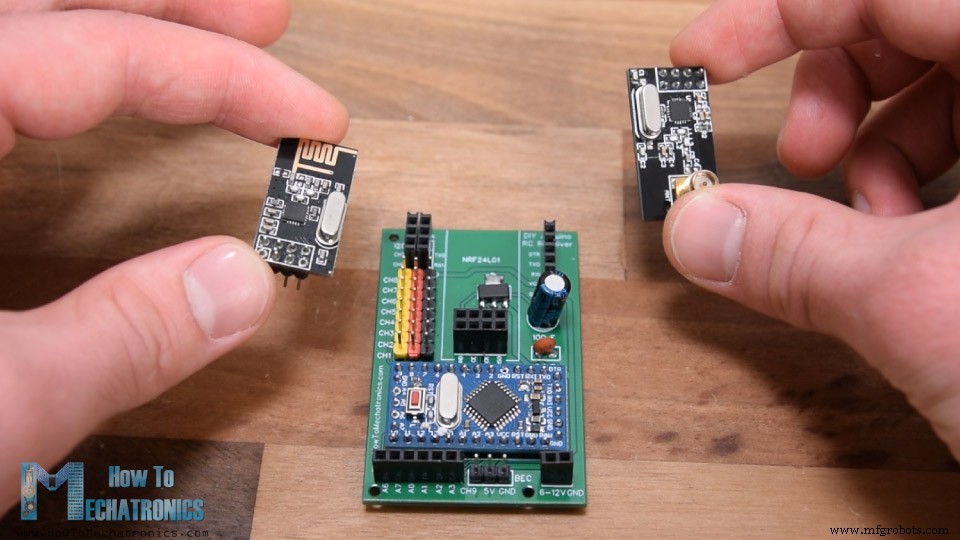
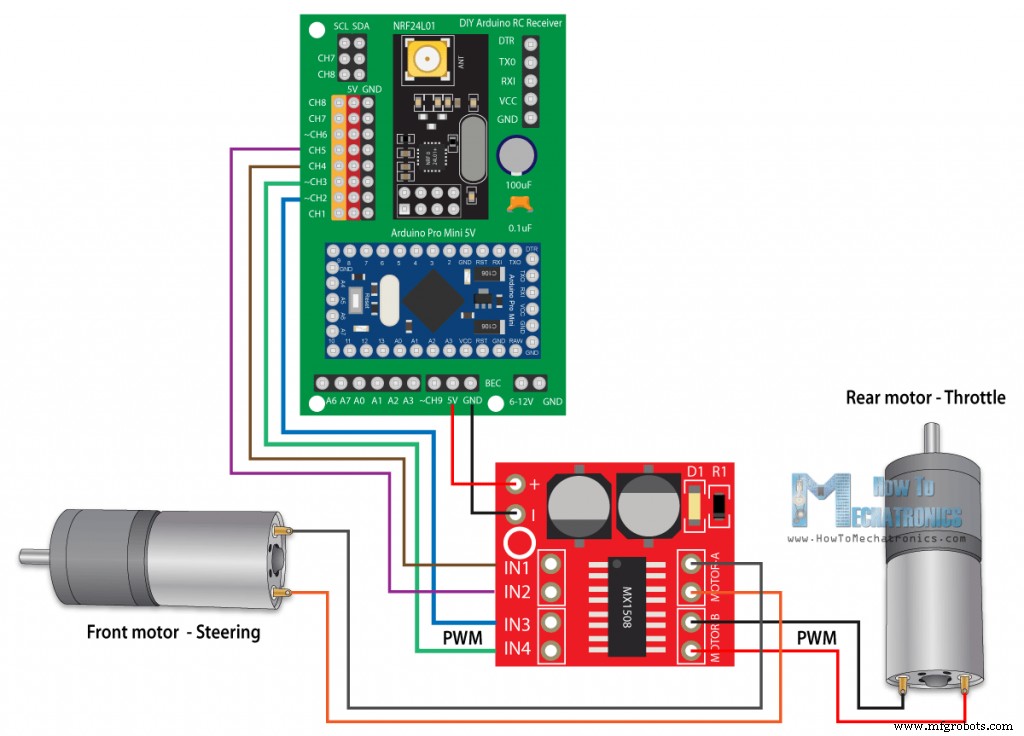
Para empezar, echemos un vistazo al diagrama de circuito de este sistema. La comunicación por radio se basa en los módulos transceptores NRF24L01.
El transmisor envía constantemente datos desde sus controladores, los joysticks, los botones, los potenciómetros y los interruptores de palanca, y recibimos estos datos con el receptor. Para obtener más detalles sobre cómo funciona este transmisor Arduino, puede consultar mi otro tutorial detallado.
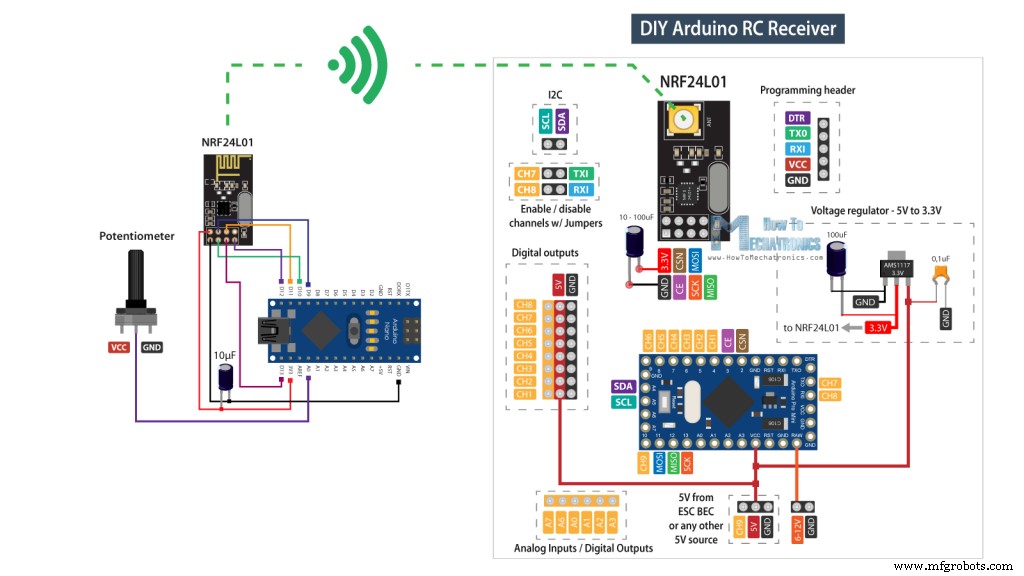
También podemos señalar aquí que este receptor RC no necesariamente funciona solo con este transmisor en particular que construí. Puede funcionar con cualquier otra configuración similar que consista en una placa Arduino y un módulo NRF24L01.
Sin embargo, el cerebro de este receptor RC es una placa Arduino Pro Mini. Para la alimentación, podemos usar el pin VCC al que podemos conectar 5V, o el pin RAW al que podemos conectar de 6 a 12V. Tenga en cuenta que hay dos versiones del Arduino Pro Mini, como la que uso aquí que funciona a 5V y la otra funciona a 3,3V. Por otro lado, el módulo NRF24L01 opera a 3.3V, por lo que necesitamos un regulador de voltaje. Esta vez estoy usando el regulador de voltaje AMS1117, que emite 3,3 V desde entradas que pueden variar de 5 V a 12 V.
Puede obtener los componentes necesarios para este receptor Arduino RC en los siguientes enlaces:
Para la comunicación con Arduino, el módulo NRF24L01 utiliza el protocolo SPI, más dos pines digitales adicionales. Eso significa que nos quedan 9 pines digitales que se pueden usar como canales de salida, dos de los cuales son los pines RX y TX. Vale la pena señalar que estos pines deben desconectarse de cualquier cosa mientras cargamos un boceto en la placa Arduino, por lo que hice posible que se conectaran o desconectaran a través de encabezados de pines separados. En realidad, también podemos usar las entradas analógicas como salidas digitales, por lo que, aunque esta placa Arduino es bastante pequeña, tenemos muchas salidas o canales disponibles.
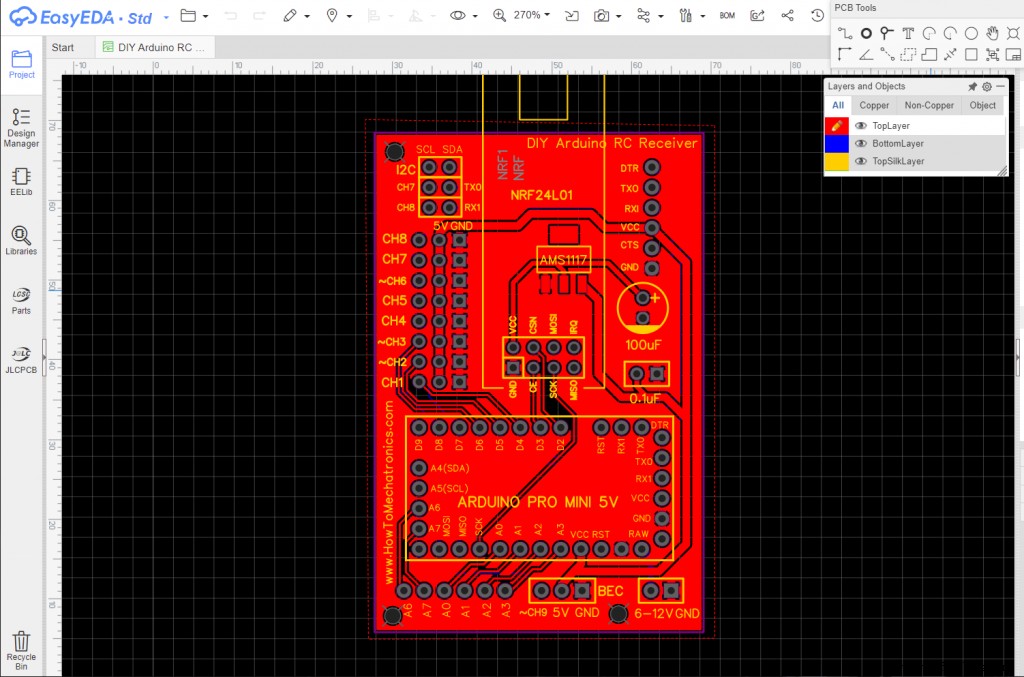
Sin embargo, para mantener este circuito compacto, hice una PCB personalizada utilizando el software gratuito de diseño de circuitos en línea EasyEDA. Aquí, arreglé los 8 canales justo al lado de un 5V y un riel de tierra, y así podemos conectarles directamente servos y ECS. El número de canal 9 está ubicado en una posición separada, cerca del pin VCC del Arduino, por lo que podemos usar, por ejemplo, un ESC para alimentar el Arduino con su función de circuito eliminador de batería que proporciona 5V. Por supuesto, podríamos usar cualquier otro canal para ese propósito, ya que el pin VCC también está conectado a esos rieles de 5V.
En cuanto a los canales número 7 y 8, aquí podemos ver como se interrumpen con estos pines de cabecera. Si queremos usarlos, solo tenemos que conectar los dos pines entre sí. El encabezado de programación se encuentra en la esquina superior derecha y el capacitor de 100uF sirve tanto para el regulador de voltaje como para el módulo NRF24L01. En la esquina inferior izquierda de la PCB, coloqué los pines analógicos.
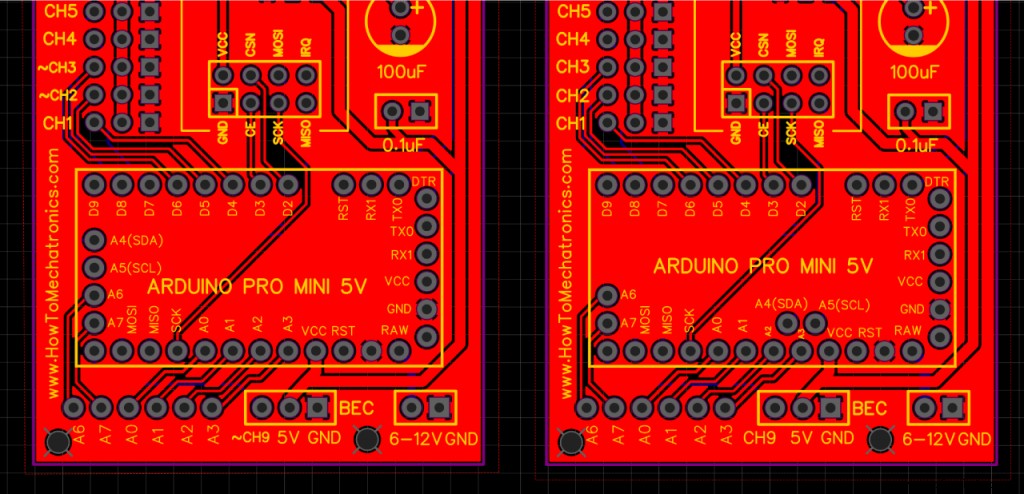
Aquí podemos notar una cosa más, y es que algunas placas Arduino Pro Mini pueden tener diferentes arreglos de pines, por lo tanto, incluí una versión más de la PCB para que pueda elegir la que coincida con su placa Arduino Pro Mini.
Aquí hay un enlace a los archivos de proyecto de este PCB. Entonces, una vez que terminé el diseño, generé el archivo Gerber necesario para fabricar la PCB.
Archivos Gerber:
Luego ordené el PCB de JLCPCB, que también es el patrocinador de este video.
Aquí podemos simplemente arrastrar y soltar el archivo Gerber y una vez cargado, podemos revisar nuestro PCB en el visor de Gerber. Si todo está bien, podemos continuar y seleccionar las propiedades que queremos para nuestra PCB. Y eso es todo, ahora podemos simplemente pedir nuestro PCB a un precio razonable. Tenga en cuenta que si es su primer pedido de JLCPCB, puede obtener hasta 5 PCB por solo $2.
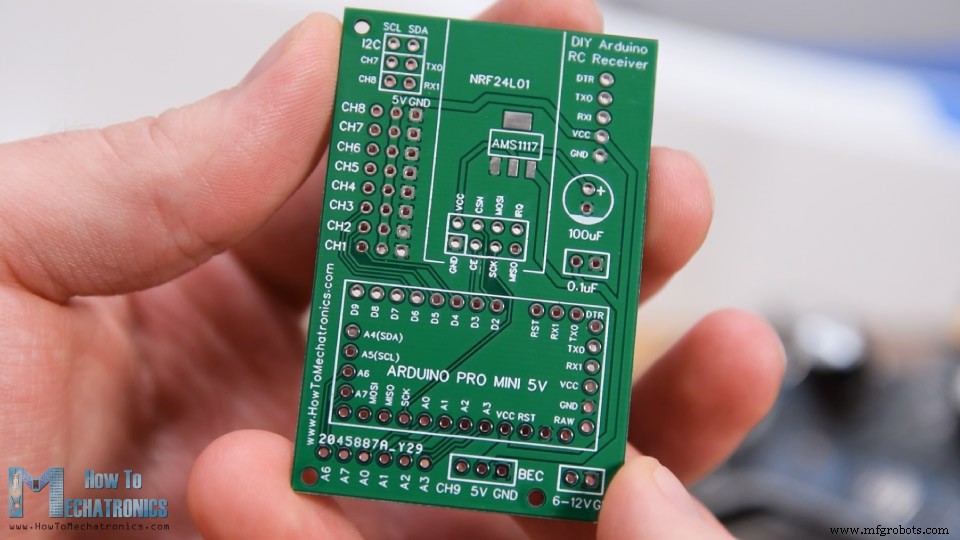
Después de varios días han llegado los PCB. La calidad de los PCB es excelente y todo es exactamente igual que en el diseño.
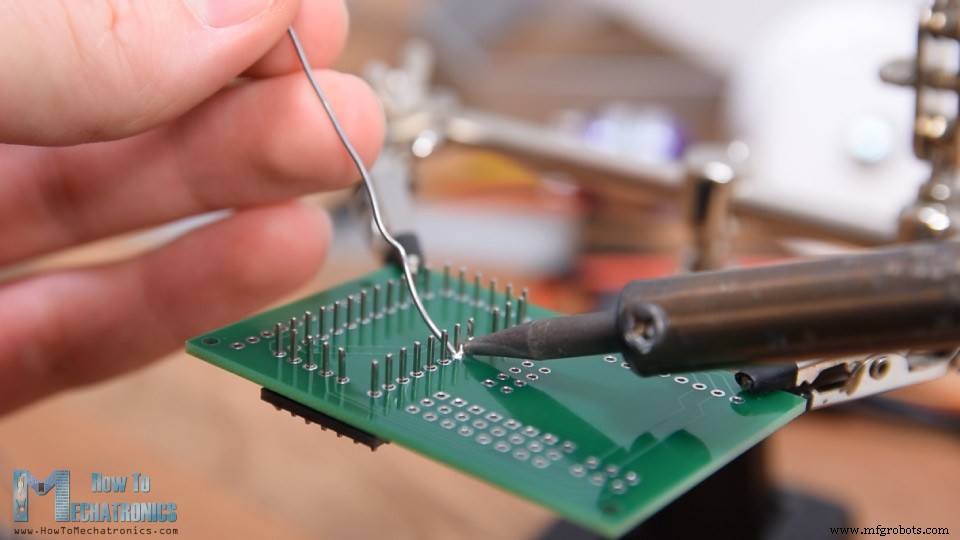
Ahora podemos continuar y ensamblar la PCB. Primero, necesitamos soldar los cabezales de los pines de la placa Arduino. Una forma conveniente de hacerlo es usar una placa de prueba para pegar los cabezales de pines y así la placa permanecerá firmemente en su lugar mientras se suelda. Como dije antes, dependiendo de tu placa, los pines pueden variar un poco, así que tenlo en cuenta al soldarlos.
Además, hay algunos pines de tierra que debemos dejar libres ya que hay algunos rastros que se ejecutan en la PCB debajo de ellos. Una vez que soldé la placa Arduino, corté el exceso de longitud de los pines.
A continuación, coloqué todos los demás encabezados de pines en su lugar. Necesitamos encabezados de pin macho y hembra, o en realidad depende de usted qué encabezados de pin elegirá usar. Sin embargo, es una buena idea usar conectores macho para los canales digitales, ya que los servomotores y las conexiones ESC son hembra, por lo que podemos conectarlos fácilmente.
El regulador de voltaje es un componente de montaje en superficie, así que usé un poco de adhesivo Blue-Tack para mantenerlo en su lugar mientras soldaba. Por último, una vez que soldamos los dos capacitores en su lugar, podemos conectar el módulo NRF24L01 a los cabezales de pines apropiados.
Dependiendo de la aplicación, o el rango que necesitemos, podemos usar el módulo normal con la antena integrada, o uno al que podemos conectar una antena más grande y podemos lograr una comunicación inalámbrica de hasta 700 metros en espacios abiertos. . Eso es todo, nuestro Arduino RC Receiver ya está listo y podemos usarlo para lo que queramos.
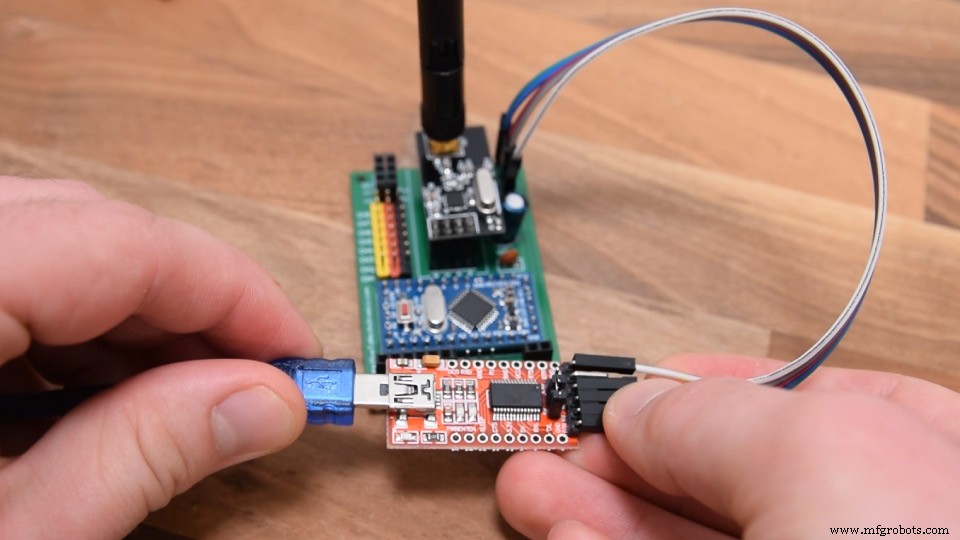
Para programar el receptor, o conectar el Arduino Pro Mini a la computadora, podemos usar una interfaz USB a serie UART que se puede conectar al encabezado de programación.
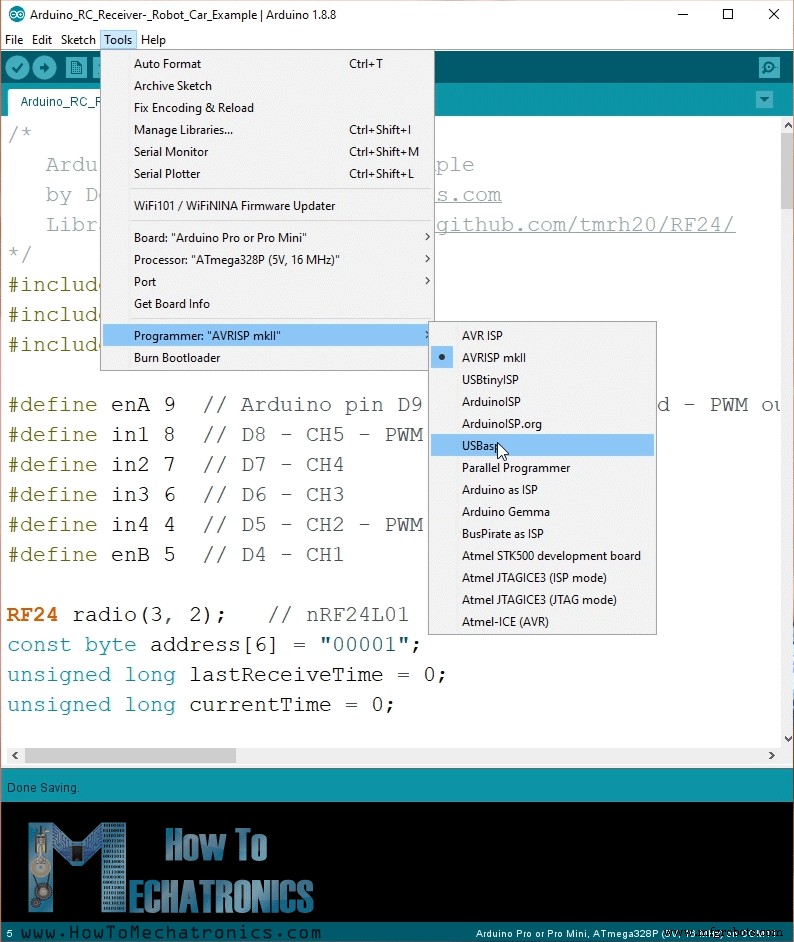
En el menú de herramientas de Arduino IDE, debemos seleccionar la placa Arduino Pro o Pro Mini, seleccionar la versión adecuada del procesador, seleccionar el puerto y seleccionar el método de programación para "USBasp".
Y ahora podemos cargar códigos al Arduino.
Bien, ahora podemos continuar y echar un vistazo al primer ejemplo.
Es un automóvil simple que consta de dos motores de 12 V CC y en algunos de mis videos anteriores ya les mostré cómo funciona y cómo construirlo.
Ver también: Controlador de motor L298N – Interfaz Arduino, cómo funciona, códigos, esquemas
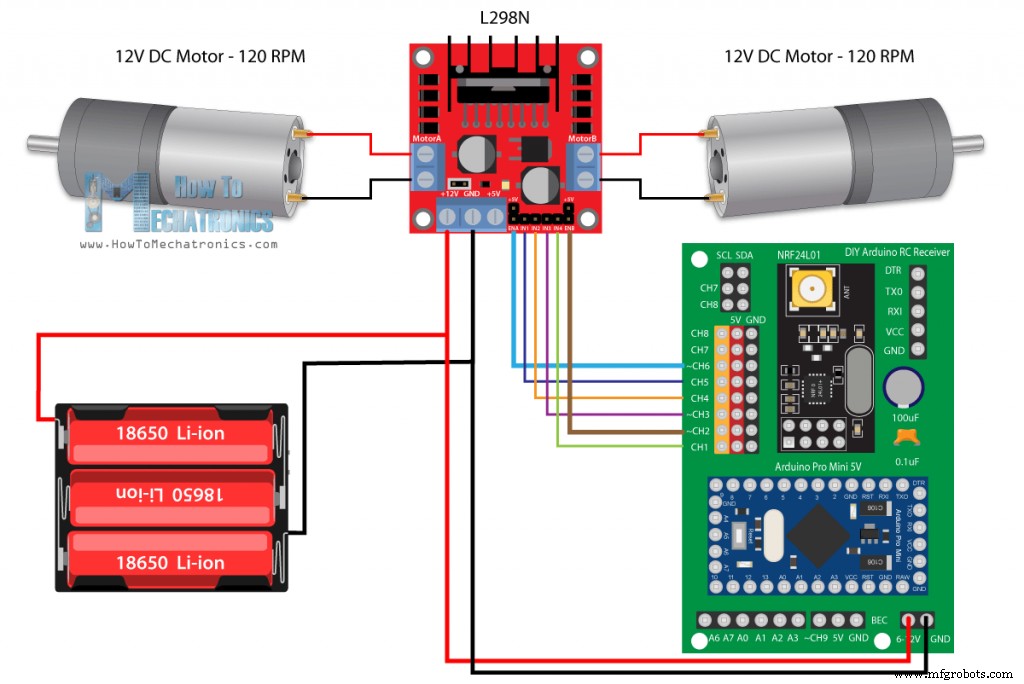
Esta vez usaremos nuestro nuevo receptor Arduino RC para controlarlo. Para accionar los motores de CC, utilizamos el controlador de motor L298N y, para la alimentación, utilizamos 3 baterías de iones de litio que proporcionan alrededor de 12 V.
Puede obtener los componentes necesarios para este ejemplo en los siguientes enlaces:
Entonces, las conexiones son realmente simples, los 12V que provienen de las baterías van al pin de 12V de nuestro receptor, y los seis pines de control del controlador van a los 6 canales. Debemos señalar aquí que para poder controlar la velocidad de los motores, debemos proporcionar una señal PWM a los pines Habilitar A y Habilitar B del controlador. En nuestro receptor, los canales número 2, 3, 6 y 9 pueden emitir señales PWM, por lo que conecté los pines de habilitación del controlador a los canales número 2 y 6 en este caso.
Echemos un vistazo al código de Arduino ahora.
Descripción: Entonces, primero debemos incluir el SPI y la biblioteca RF24, definir algunos pines, el objeto de radio y la estructura de datos donde almacenaremos los datos entrantes del transmisor. En la sección de configuración, debemos definir las salidas de los pines y comenzar la comunicación por radio. Para obtener más detalles sobre cómo funciona esto y qué hace cada una de estas líneas, puede consultar mi tutorial detallado NRF24L01.
En la sección de bucle, comprobamos constantemente si estamos recibiendo datos y, si lo hacemos, leemos los datos entrantes. Si echamos un vistazo rápido al código del transmisor, podemos ver qué tipo de datos envía al receptor. Lee los datos de todos sus controladores, los joysticks, los potenciómetros y los botones, y envía esos datos como un solo paquete al receptor.
Entonces, una vez que leemos esos datos, podemos hacer lo que queramos con ellos. En este caso, utilizaremos el valor del eje Y del Joystick 1 para controlar el acelerador y el valor del eje X para controlar la dirección. Puse estos datos en variables separadas de aceleración y dirección. Los valores que obtenemos de los joysticks van de 0 a 255. Por lo tanto, si movemos el joystick hacia abajo, configuraremos los pines de control del conductor de manera adecuada para que el automóvil se mueva hacia atrás y usaremos el valor del acelerador para controlar la velocidad de movimiento. El mismo principio se aplica para conducir hacia adelante, hacia la izquierda y hacia la derecha. Nuevamente, ya tengo un tutorial detallado sobre cómo funciona este automóvil para que pueda verificarlo para una mejor comprensión. En la parte inferior del código, podemos observar la función personalizada resetData(), que restablece todos los valores a sus valores iniciales predeterminados, de modo que, en caso de que se pierda la comunicación por radio, el automóvil detectará el movimiento.
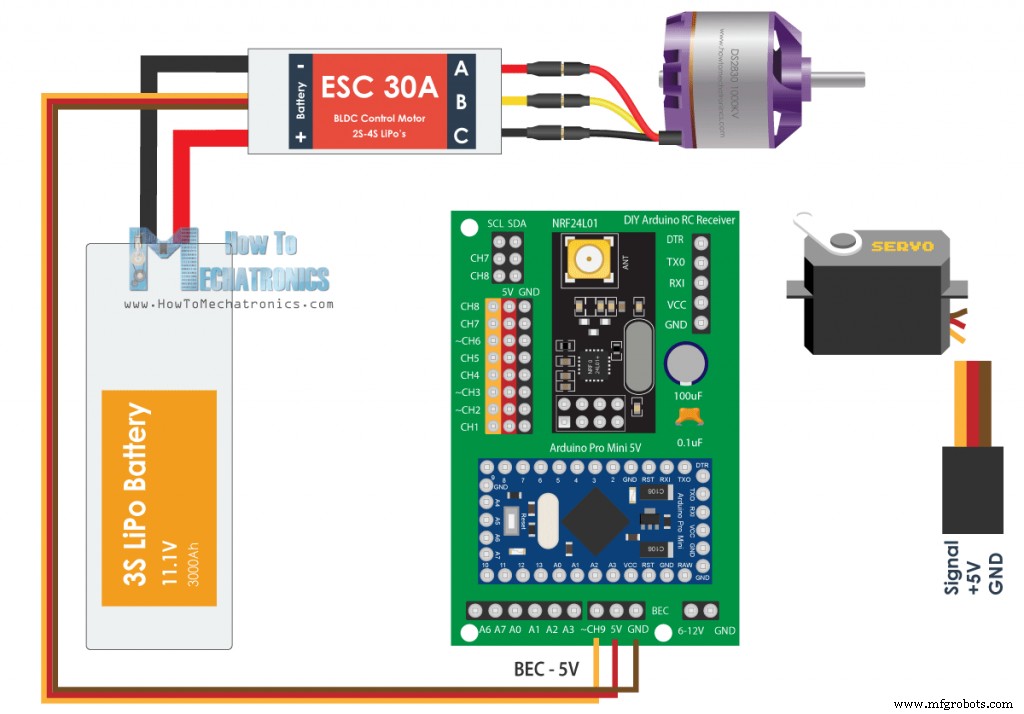
Muy bien, ahora podemos continuar con el segundo ejemplo, controlar servos y motores sin escobillas usando este receptor Arduino RC.
Para controlar motores sin escobillas, necesitamos un ESC o controlador electrónico de velocidad. El Arduino se comunica con el ESC con un solo pin. Para controlar el ESC, el Arduino envía una señal PWM específica al ESC y con ella el ESC controla la velocidad del motor. El ESC con esa misma conexión proporciona 5 V a través de su función de circuito eliminador de batería, por lo que también podemos alimentar nuestro receptor con él.
Ver también: Tutorial de control de motores sin escobillas de Arduino | ESC | BLDC
En cuanto a los servomotores, tienen el mismo tipo de conexiones que los ESC y simplemente podemos conectarlos a cualquiera de los canales que hay disponibles.
Puede obtener los componentes necesarios para este ejemplo en los siguientes enlaces:
Las señales de entrada para controlar tanto los servos como los motores sin escobillas mediante ESC son casi las mismas. Utilizan una señal PWM específica de 50 Hz que se puede generar fácilmente con la biblioteca Arduino Servo.
Nota: Al usar servos MG996R con esta configuración, pueden causar un problema en el circuito y quemar el Arduino Pro Mini. Podría consumir una corriente más alta y provocar picos de voltaje en el riel de 5V. El Arduino Pro Mini debe manejar hasta 5.5v en el pin de 5V, pero cuando ocurren esos picos, pueden quemar el Arduino. Tuve este problema al probar el circuito, y alguien en la sección de comentarios también informó lo mismo. Una solución a esto podría ser colocar condensadores de desacoplamiento más grandes en los servos, pero no estoy muy seguro y no lo he probado. Por lo tanto, tenga en cuenta este problema.
Por otro lado, en el ejemplo usé otros dos servos MG996R que no quemaron el Arduino, supongo que porque no causaban picos tan altos. También usé este ejemplo con 4 servos S90 más pequeños y no tuve ningún problema.
Ver también: Cómo funciona el servomotor & Cómo controlar servos usando Arduino
Entonces, después de recibir los datos del transmisor, convertimos los valores de 0 a 255 a valores de 0 a 180 para controlar los servos usando la función write(). De manera similar, convertimos los datos para controlar el ESC a valores de 1000 a 2000. En este ejemplo, controlamos este ESC desde el punto medio del Joystick número 1, hasta la posición superior, por lo que convertimos los valores desde el medio , 127 a 255 en valores de 1000 a 2000. Usando la función writeMicroseconds() de Servo Library enviamos la señal PWM al ESC y así podemos controlar la velocidad del motor sin escobillas de mínimo a máximo.
Ver también:Avión Arduino RC | 100% bricolaje
Así es como podemos controlar aviones RC, coches, barcos, etc., ya que suelen utilizar este tipo de motores, servos y motores brushless.
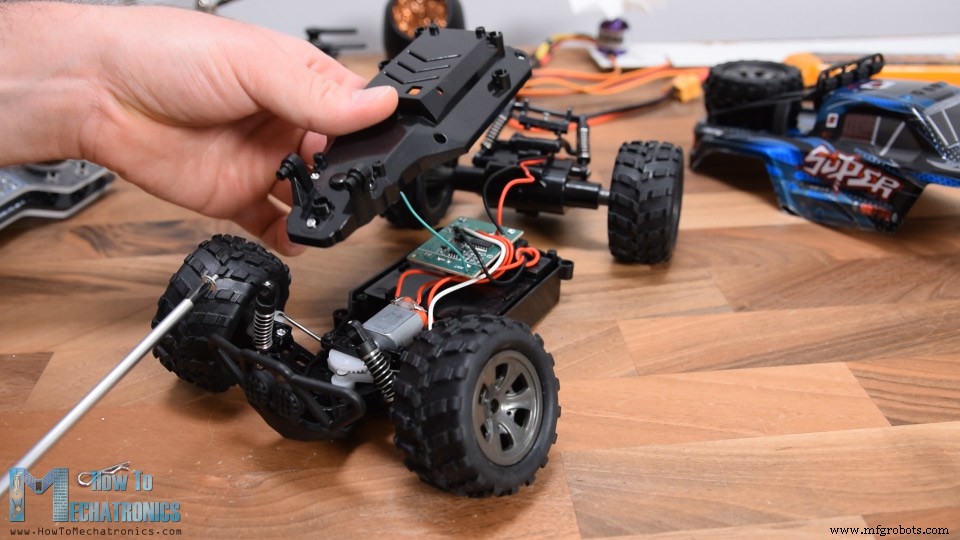
El auto RC vino con su propio controlador que puede controlar las ruedas delanteras para moverse hacia la izquierda y hacia la derecha, así como mover el auto hacia adelante y hacia atrás.
Sin embargo, como es un coche RC barato, los controles son digitales, o se activan o desactivan, a la posición máxima izquierda y derecha y la velocidad máxima. Independientemente de eso, desarmé el automóvil para ver qué hay dentro y cómo puedo implementar el receptor Arduino RC para controlarlo.
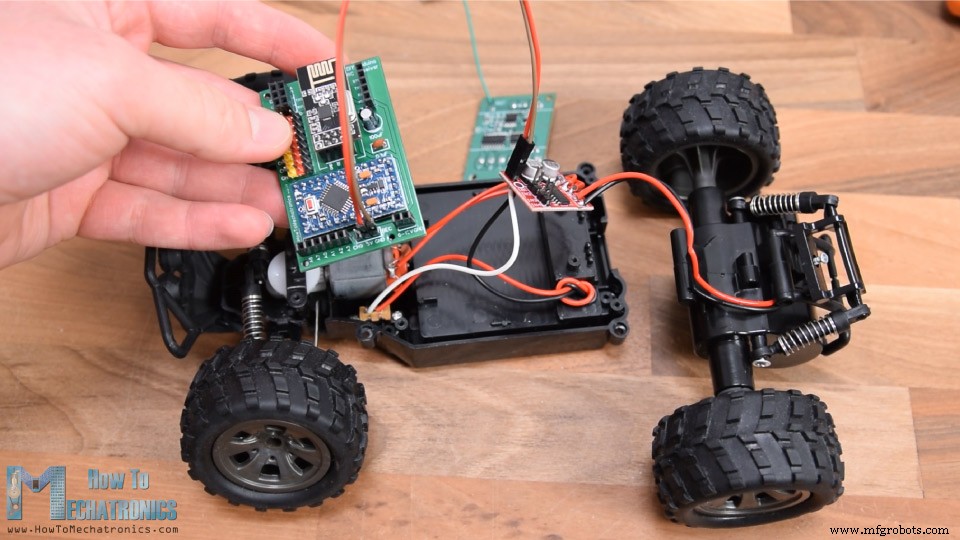
Una vez que descubrí los componentes electrónicos, noté que los dos motores son en realidad simples motores de CC que funcionan a 5V. Incluso el motor delantero que controla los movimientos limitados de la dirección es un simple motor de CC de rotación continua.
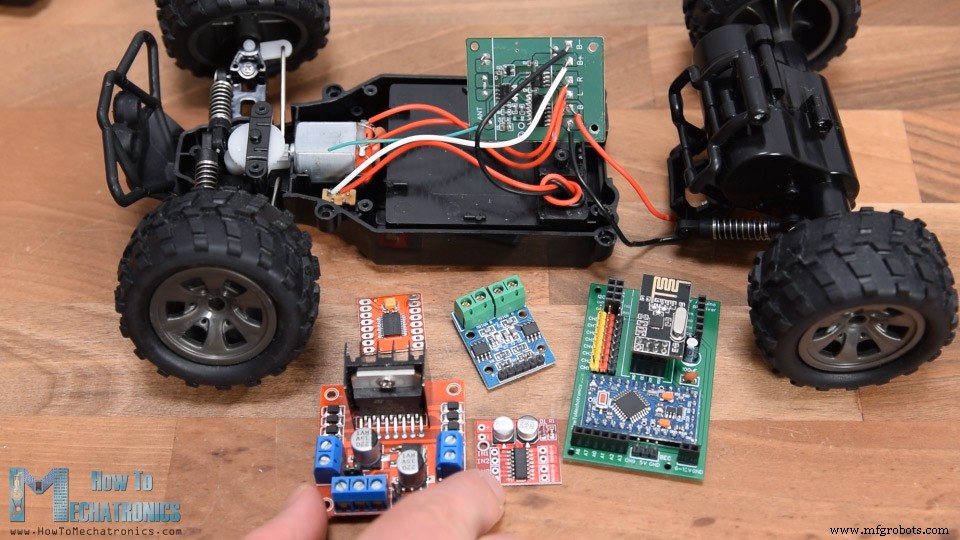
Entonces, aparentemente, ya sabemos cómo controlar los motores de CC, por lo que reemplazar esta placa de circuito con nuestro receptor Arduino DIY será bastante fácil. Además de nuestro receptor, solo necesitamos un controlador de motor capaz de manejar dos motores al mismo tiempo. Hay muchas opciones para ese propósito, incluso la que usamos en el primer ejemplo, el controlador L298N.
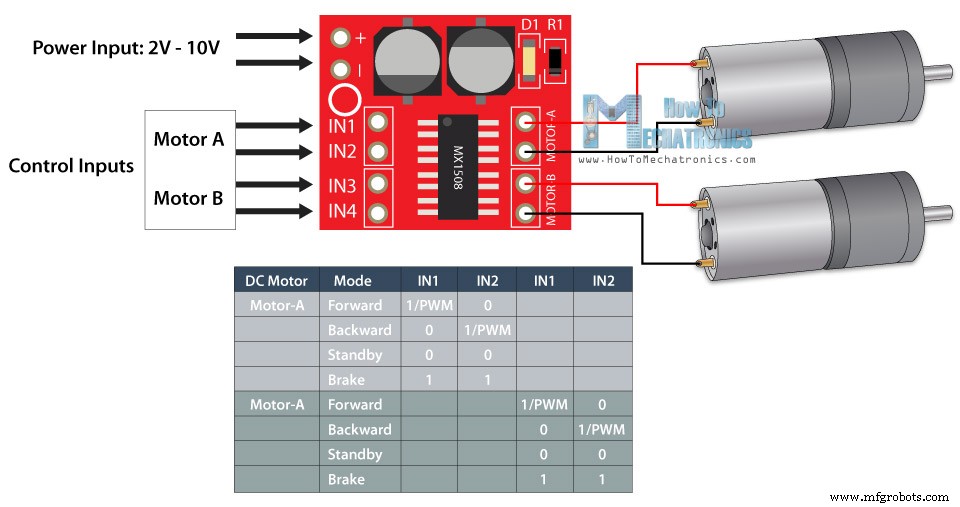
Sin embargo, ese es demasiado grande para esta aplicación, así que elegí el controlador de motor MX1508. Este es un controlador de motor de CC dual simple que cuenta con puente H y control PWM. Tiene 4 pines de entrada de control, 4 pines para los motores y 2 pines para alimentación.
Desoldé las conexiones de los motores de la placa de circuito del coche RC y las soldé al controlador. En la parte trasera soldé los pines de alimentación y lo que queda ahora es conectar este controlador con el receptor. La energía de este automóvil RC proviene de una batería Ni-Cd de 4,8 V ubicada en la parte inferior del automóvil.
Entonces, usando cables de salto, conecté estos pines al pin VCC del Arduino y también conecté los 4 pines de entrada de control del controlador a 4 canales digitales. Como dije, este controlador es compatible con el control PWM, por lo que para el motor B, o el motor trasero, utilicé los canales PWM número 2 y 3.
Puede obtener los componentes necesarios para este ejemplo en los siguientes enlaces:
El código de este coche RC es muy similar al del primer ejemplo.
Usamos los datos provenientes de los joysticks para controlar el acelerador y la dirección del auto RC. Para retroceder, usamos la función analogWrite() para enviar la señal PWM al controlador en el pin Input3, mientras mantenemos el pin input4 BAJO. Para avanzar, lo hacemos al revés. Si el joystick se queda en el medio, le damos la orden al conductor para que frene o pare los motores. El mismo principio se usa para el motor de dirección, aunque aquí no tenemos que usar la función analogWrite() ya que no necesitamos controlar la velocidad de este motor.
Después de subir este boceto al Arduino, tuve que volver a montar el coche RC. Coloqué el pequeño controlador en la carcasa interior y aseguré el resto de las piezas con los tornillos. Volví a conectar el receptor con el conductor y lo coloqué debajo de la carcasa exterior del automóvil, que tenía espacio suficiente para caber en el receptor.
Entonces, no solo modificamos este auto RC para que sea controlado con nuestro transmisor DIY RC, sino que también lo mejoramos agregando control PWM para que ahora también podamos controlar la velocidad del auto. En caso de que el modelo RC que quieras modificar tenga servos y motores brushless en lugar de motores DC, puedes seguir el método explicado en el segundo ejemplo.
Espero que hayas disfrutado este tutorial y hayas aprendido algo nuevo. Siéntase libre de hacer cualquier pregunta en la sección de comentarios a continuación y no olvide consultar mi colección de proyectos Arduino.
Diagrama del circuito del receptor Arduino RC
Diseño de PCB
Montaje de PCB

Ejemplo 1 – Arduino RC Car
/*
Arduino RC Receiver - Car Example
by Dejan, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#define enA 9 // Arduino pin D9 - CH6 on PCB board - PWM output
#define in1 8 // D8 - CH5
#define in2 7 // D7 - CH4
#define in3 6 // D6 - CH3
#define in4 4 // D4 - CH1
#define enB 5 // D5 - CH2 - PWM output
RF24 radio(3, 2); // nRF24L01 (CE, CSN)
const byte address[6] = "00001";
unsigned long lastReceiveTime = 0;
unsigned long currentTime = 0;
// Max size of this struct is 32 bytes
struct Data_Package {
byte j1PotX;
byte j1PotY;
byte j1Button;
byte j2PotX;
byte j2PotY;
byte j2Button;
byte pot1;
byte pot2;
byte tSwitch1;
byte tSwitch2;
byte button1;
byte button2;
byte button3;
byte button4;
};
Data_Package data; //Create a variable with the above structure
int steering, throttle;
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
//Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_LOW);
radio.startListening(); // Set the module as receiver
resetData();
}
void loop() {
// Check whether we keep receving data, or we have a connection between the two modules
currentTime = millis();
if ( currentTime - lastReceiveTime > 1000 ) { // If current time is more then 1 second since we have recived the last data, that means we have lost connection
resetData(); // If connection is lost, reset the data. It prevents unwanted behavior, for example if a drone jas a throttle up, if we lose connection it can keep flying away if we dont reset the function
}
// Check whether there is data to be received
if (radio.available()) {
radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure
lastReceiveTime = millis(); // At this moment we have received the data
}
// Parse the data from the Joystic 1 to the throttle and steering variables
throttle = data.j1PotY;
steering = data.j1PotX;
// Throttle used for forward and backward control
// Joystick values: 0 to 255; down = 0; middle = 127; up = 255
if (throttle < 110) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining throttle readings for going backward from 110 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(throttle, 110, 0, 0, 255);
motorSpeedB = map(throttle, 110, 0, 0, 255);
}
else if (throttle > 140) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing throttle readings for going forward from 140 to 255 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(throttle, 140, 255, 0, 255);
motorSpeedB = map(throttle, 140, 255, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// Steering used for left and right control
if (steering < 110) {
// Convert the declining steering readings from 140 to 255 into increasing 0 to 255 value
int xMapped = map(steering, 110, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (steering > 140) {
// Convert the increasing steering readings from 110 to 0 into 0 to 255 value
int xMapped = map(steering, 140, 255, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}
void resetData() {
// Reset the values when there is no radio connection - Set initial default values
data.j1PotX = 127;
data.j1PotY = 127;
data.j2PotX = 127;
data.j2PotY = 127;
data.j1Button = 1;
data.j2Button = 1;
data.pot1 = 1;
data.pot2 = 1;
data.tSwitch1 = 1;
data.tSwitch2 = 1;
data.button1 = 1;
data.button2 = 1;
data.button3 = 1;
data.button4 = 1;
}Code language: Arduino (arduino)Ejemplo 2 – Arduino RC Receiver Servos and Brushless Motors Control

/*
DIY RC Receiver - Servos and Brushless motors control
by Dejan, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
RF24 radio(3, 2); // nRF24L01 (CE, CSN)
const byte address[6] = "00001";
unsigned long lastReceiveTime = 0;
unsigned long currentTime = 0;
Servo esc; // create servo object to control the ESC
Servo servo1;
Servo servo2;
int escValue, servo1Value, servo2Value;
// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte j1PotX;
byte j1PotY;
byte j1Button;
byte j2PotX;
byte j2PotY;
byte j2Button;
byte pot1;
byte pot2;
byte tSwitch1;
byte tSwitch2;
byte button1;
byte button2;
byte button3;
byte button4;
};
Data_Package data; //Create a variable with the above structure
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_LOW);
radio.startListening(); // Set the module as receiver
resetData();
esc.attach(10); // Arduino digital pin D10 - CH9 on PCB board
servo1.attach(4); // D4 - CH1
servo2.attach(5); // D5 - CH2
}
void loop() {
// Check whether we keep receving data, or we have a connection between the two modules
currentTime = millis();
if ( currentTime - lastReceiveTime > 1000 ) { // If current time is more then 1 second since we have recived the last data, that means we have lost connection
resetData(); // If connection is lost, reset the data. It prevents unwanted behavior, for example if a drone jas a throttle up, if we lose connection it can keep flying away if we dont reset the function
}
// Check whether there is data to be received
if (radio.available()) {
radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure
lastReceiveTime = millis(); // At this moment we have received the data
}
// Controlling servos
servo1Value = map(data.j2PotX, 0, 255, 0, 180); // Map the receiving value form 0 to 255 to 0 to 180(degrees), values used for controlling servos
servo2Value = map(data.j2PotY, 0, 255, 0, 180);
servo1.write(servo1Value);
servo2.write(servo2Value);
// Controlling brushless motor with ESC
escValue = map(data.j1PotY, 127, 255, 1000, 2000); // Map the receiving value form 127 to 255 to 1000 to 2000, values used for controlling ESCs
esc.writeMicroseconds(escValue); // Send the PWM control singal to the ESC
}
void resetData() {
// Reset the values when there is no radio connection - Set initial default values
data.j1PotX = 127;
data.j1PotY = 127;
data.j2PotX = 127;
data.j2PotY = 127;
data.j1Button = 1;
data.j2Button = 1;
data.pot1 = 1;
data.pot2 = 1;
data.tSwitch1 = 1;
data.tSwitch2 = 1;
data.button1 = 1;
data.button2 = 1;
data.button3 = 1;
data.button4 = 1;
}Code language: Arduino (arduino)Ejemplo 3:Control de modelo de coche RC

/*
Arduino RC Receiver - RC Model control
by Dejan , www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#define in3 5 // D5 - CH2 - PWM output
#define in4 6 // D6 - CH3 - PWM output
#define in1 7 // D7 - CH4
#define in2 8 // D8 - CH5
RF24 radio(3, 2); // nRF24L01 (CE, CSN)
const byte address[6] = "00001";
unsigned long lastReceiveTime = 0;
unsigned long currentTime = 0;
// Max size of this struct is 32 bytes
struct Data_Package {
byte j1PotX;
byte j1PotY;
byte j1Button;
byte j2PotX;
byte j2PotY;
byte j2Button;
byte pot1;
byte pot2;
byte tSwitch1;
byte tSwitch2;
byte button1;
byte button2;
byte button3;
byte button4;
};
Data_Package data; //Create a variable with the above structure
int steering, throttle;
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_LOW);
radio.startListening(); // Set the module as receiver
resetData();
}
void loop() {
// Check whether we keep receving data, or we have a connection between the two modules
currentTime = millis();
if ( currentTime - lastReceiveTime > 1000 ) { // If current time is more then 1 second since we have recived the last data, that means we have lost connection
resetData(); // If connection is lost, reset the data. It prevents unwanted behavior, for example if a drone jas a throttle up, if we lose connection it can keep flying away if we dont reset the function
}
// Check whether there is data to be received
if (radio.available()) {
radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure
lastReceiveTime = millis(); // At this moment we have received the data
}
// Parse the data from the Joystic 1 to the steering and throttle variables
steering = data.j2PotX;
throttle = data.j1PotY;
// Throttle used for forward and backward control
if (throttle < 110) {
// Convert the declining throttle readings for going backward from 110 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedB = map(throttle, 110, 0, 0, 255);
// Set Motor B backward
analogWrite(in3, motorSpeedB);
digitalWrite(in4, LOW);
}
else if (throttle > 140) {
// Convert the increasing throttle readings for going forward from 140 to 255 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedB = map(throttle, 140, 255, 0, 255);
// Set Motor B forward
digitalWrite(in3, LOW);
analogWrite(in4, motorSpeedB);
}
// If joystick stays in middle the motors are not moving
else {
digitalWrite(in3, HIGH);
digitalWrite(in4, HIGH);
}
// steering used for left and right control
if (steering < 110) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
}
if (steering > 140) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
// If joystick stays in middle the motors are not moving
else {
digitalWrite(in1, HIGH);
digitalWrite(in2, HIGH);
}
}
void resetData() {
// Reset the values when there is no radio connection - Set initial default values
data.j1PotX = 127;
data.j1PotY = 127;
data.j2PotX = 127;
data.j2PotY = 127;
data.j1Button = 1;
data.j2Button = 1;
data.pot1 = 1;
data.pot2 = 1;
data.tSwitch1 = 1;
data.tSwitch2 = 1;
data.button1 = 1;
data.button2 = 1;
data.button3 = 1;
data.button4 = 1;
}Code language: Arduino (arduino)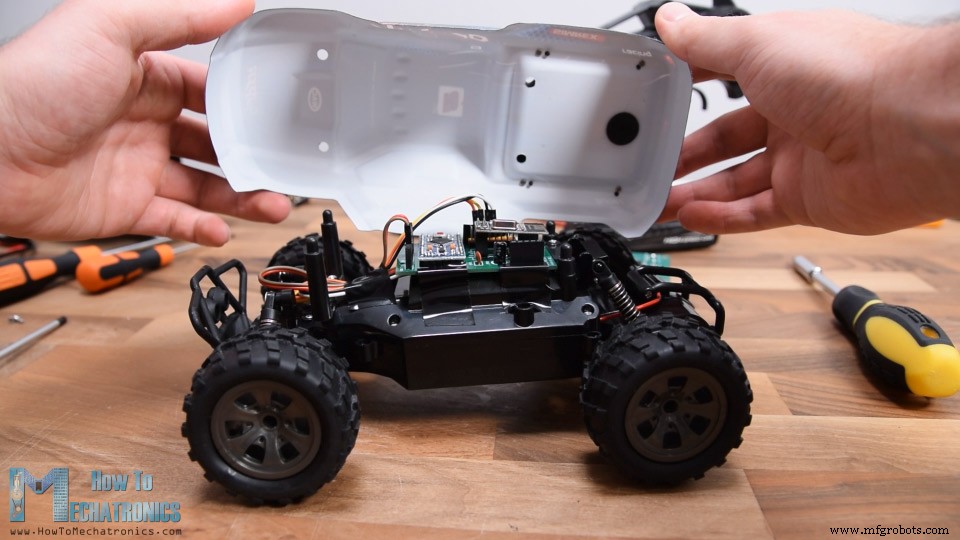
Proceso de manufactura
- Bricolaje:Regulación y monitoreo de temperatura para HomeBrew
- Medición de temperatura para proyectos científicos y de laboratorio
- Elegir entre un enrutador CNC y un cortador láser CNC para sus proyectos de manualidades.
- Animación LCD y juegos
- Voltímetro de bricolaje con Arduino y un teléfono inteligente
- Voltímetro de bricolaje con Arduino y una pantalla Nokia 5110
- Python3 y comunicación Arduino
- Radio FM usando Arduino y RDA8057M
- La importancia de los modelos CAD para proyectos de fabricación de metal
- Tornos mejorados para pulido y desbarbado
- Mkr1000 Pinout:una opción preferida para proyectos de IoT