


Coche controlado por voz
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Acerca de este proyecto
Componentes:
- Arduino Uno
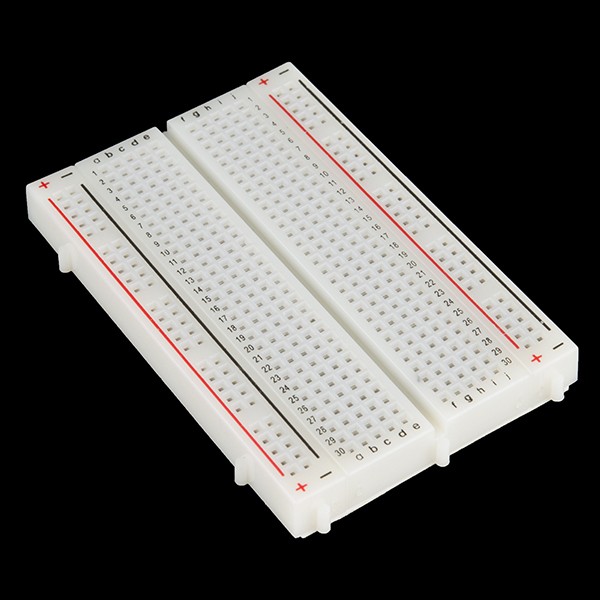
- Protoboard
- Motores x2
- Ruedas x2
- Chasis (de tamaño apropiado)
- Regulador de voltaje LM7805
- L293D
- Batería de 12 V (fuente de alimentación)
- Cables de puente
- Módulo Bluetooth HC-05
Puede encontrar la aplicación aquí:https://play.google.com/store/apps/details?id=appinventor.ai_cempehlivan92.Arduino_Sesli_Kontrol
Idea:
Conectamos el módulo Bluetooth con la aplicación móvil. Una vez hecho esto, los comandos que damos a través del móvil se envían al Arduino a través del módulo. Aceptamos carácter por carácter del búfer de serie enviado por la aplicación y los combinamos para formar una cadena.
Luego lo comparamos con el comando. Si coincide, se ejecuta el comando. Por ejemplo, cuando la cadena que recibimos es "Derecha", el bot gira a la derecha.
Conexiones:
Encuentre todas las conexiones aquí:https://yainnoware.blogspot.com/p/voice-controlled-car.html
Código:
int motor_input1 =11; int motor_input2 =10; int motor_input3 =5; int motor_input4 =6; String voice; void setup () {Serial.begin (9600); pinMode (entrada_motor1, SALIDA); // MOTOR DERECHO pinMode (motor_input2, OUTPUT); // MOTOR DERECHO pinMode (motor_input3, OUTPUT); // MOTOR IZQUIERDO pinMode (motor_input4, OUTPUT); // MOTOR IZQUIERDO} void loop () {while (Serial.available ()> 0) {delay (10); char c =Serial.read (); if (c =='#') {descanso; } Voz + =c; } If (voz =="adelante") {digitalWrite (motor_input1, LOW); digitalWrite (entrada_motor2, ALTA); digitalWrite (motor_input3, BAJO); digitalWrite (entrada_motor4, ALTA); retraso (5000); } Else if (voice =="back") {digitalWrite (motor_input1, HIGH); digitalWrite (entrada_motor2, BAJA); digitalWrite (entrada_motor3, ALTA); digitalWrite (entrada_motor4, BAJA); delay (5000);} else if (voice =="left") {digitalWrite (motor_input1, LOW); digitalWrite (entrada_motor2, ALTA); digitalWrite (entrada_motor3, ALTA); digitalWrite (entrada_motor4, BAJA); retraso (800); } Else if (voz =="derecha") {digitalWrite (motor_input1, HIGH); digitalWrite (entrada_motor2, BAJA); digitalWrite (entrada_motor3, BAJA); digitalWrite (entrada_motor4, ALTA); retraso (800); } If (voice.length ()> 0) {Serial.println (voice); voz =""; digitalWrite (entrada_motor1, BAJA); digitalWrite (entrada_motor2, BAJA); digitalWrite (entrada_motor3, BAJA); digitalWrite (entrada_motor4, BAJA); }}
Alarma de intrusión con notificación de mensaje de texto
Visualizador de audio de matriz RGB con Arduino
Proceso de manufactura
- MajorTom:ARDrone 2.0 controlado por voz de Alexa
- Dados digitales Arduino
- Juego de ruleta DIY 37 LED
- Coche RC controlado por joystick
- ATtiny85 Mini Arcade:Serpiente
- Detector de alcance portátil
- MobBob:Robot Arduino DIY controlado por un teléfono inteligente Android
- Grúa hidráulica controlada por aplicación
- Coche robot inteligente de seguimiento facial
- Robot de piano controlado por Arduino:PiBot
- Galvanoplastia con cobre