


¡Robot humanoide parlante inteligente solo con Arduino!
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Este Robot - Mofiza- (nombre extraño) Puede VER, HABLAR y REACCIONAR con su entorno. Antes de continuar, mire el video:
Desde que vi hacer robots parlantes, vi que la gente realmente usa otras placas de desarrollo en lugar de Arduino para hacer robots parlantes. Pero es completamente posible hacer un robot humanoide con Arduino que pueda hablar y agregar muchos servos para que se mueva. Así que comencemos:
Actualización (cómo lo hice) -
Paso 1:Piezas que necesitará


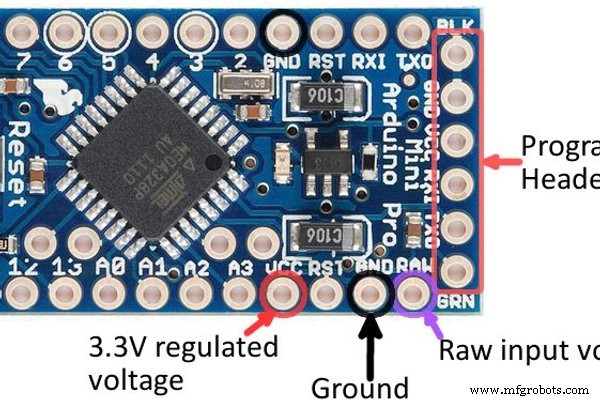
- Arduino Pro mini (5v 16 Mhz) [cualquier placa es buena pero la he usado para hacerla pequeña)
- Pines de cabezal hembra para conectar en pcb
- Pines de cabecera masculinos
- Tablero Vero para hacer el circuito
- Módulo TF de tarjeta SD (para que hable)
- tarjeta micro sd (no más de 2 GB)
- 3 sensores de proximidad por infrarrojos
- Servomotor 3x (he usado micro servo sg90)
- Cartón para hacer el cuerpo
Paso 2:Conexión del sensor de infrarrojos y el cuerpo
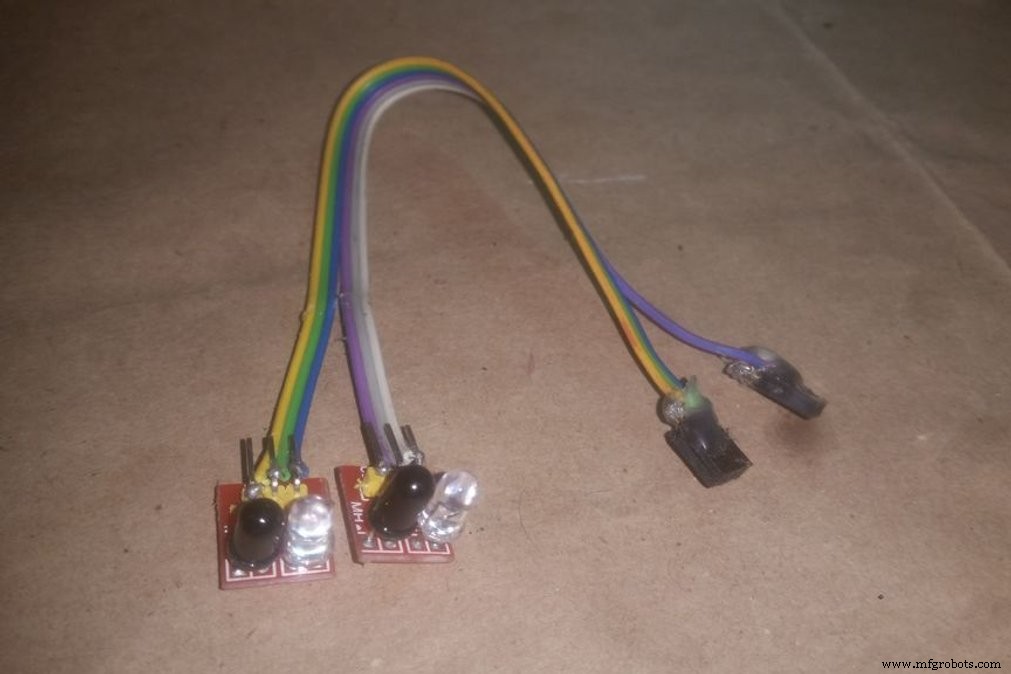

Haz un cuerpo con lo que quieras, yo lo hice con cartón. Es bastante simple.
He soldado sensores IR con cable plano como este con un encabezado hembra en un extremo y agregué dos en dos ojos y uno en el pecho.
El robot dirá el mensaje de bienvenida si detecta algo en el sensor de pecho y dirá "aaaah ... no me toques el ojo" si algún sensor de ojos está alto. y el servo que hay se moverá hacia arriba.
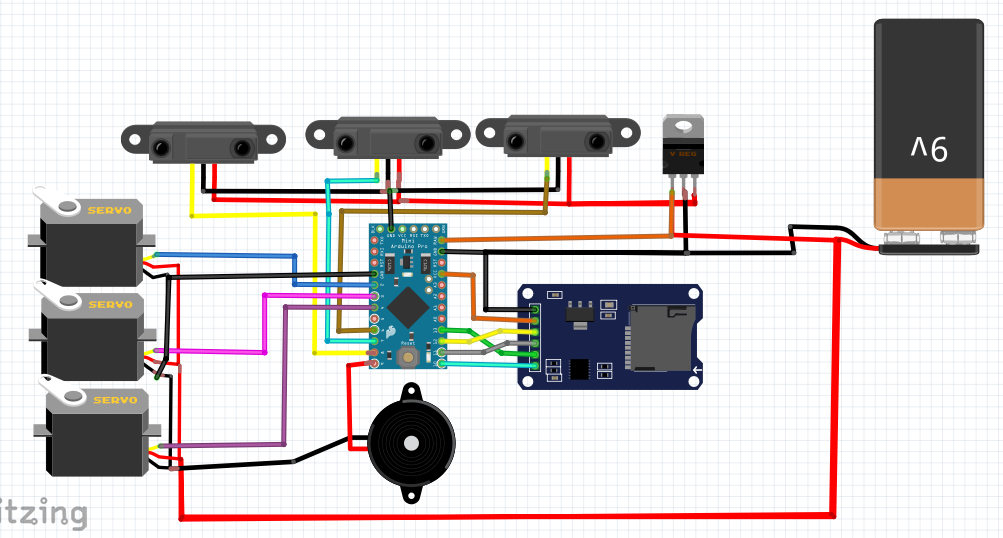
Paso 3:el circuito
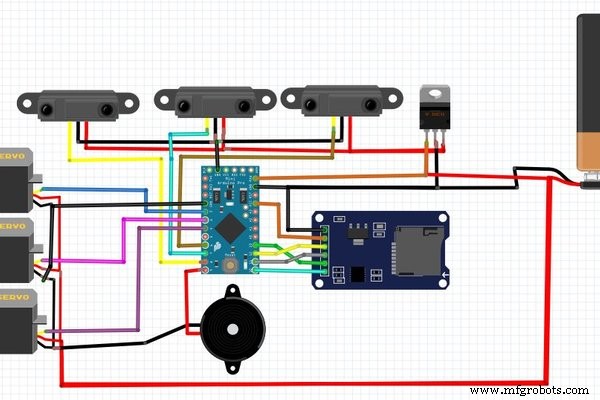
El circuito parece un poco complicado, pero no es demasiado fácil, puedes encenderlo con una batería. suelde el circuito y todos los demás componentes en una placa vero y agregue otro servo en la cabeza y las manos.
Paso 4:Código
Antes de los códigos:
Tuve que usar dos bibliotecas para este robot.
TMRpcm.h:para reproducir audio desde la tarjeta SD, hable https://github.com/TMRh20/TMRpcm
ServoTimer2.h:evita conflictos con TMRpcm y ejecuta servomotores usando timer2 ya que TMRpcm usa Timer1 en arduino. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
Este es el código para dar la bienvenida. Puede crear su propio entorno y código. Antes de llegar al código, tendrá que agregar la biblioteca ServoTimer2. Tampoco el robot no funcionará.
Y luego sube el código:
#include "ServoTimer2.h" # include # define SD_ChipSelectPin 10 # include "TMRpcm.h" #includeTMRpcm tmrpcm; ServoTimer2 matha; ServoTimer2 lhand; ServoTimer2 rhand; int in1 =6; int in2 =7; int in3 =8; configuración vacía () {matha.attach (2); lhand.attach (3); rhand.attach (4); tmrpcm.speakerPin =9; Serial.begin (9600); if (! SD.begin (SD_ChipSelectPin)) {Serial.println ("SD FAIL"); regreso; }} bucle vacío () {if (! (digitalRead (in3))) {tmrpcm.play ("welcome.wav"); lhand.write (2500); retraso (2000); lhand.write (1200); // retardo de la posición del apretón de manos (9000); } else {lhand.write (300); rhand.write (1700); matha.write (1500); }}
Paso 5:Termina
Ahora enciéndalo y listo. Un robot inteligente ha terminado de hacer. [Subiré otras fotos y detalles pronto]
Si pudiera conseguir más alfileres, haría caminar al robot. pero solo me quedaban 3 pines (digitales). Es menos de lo que necesito.
Apóyame suscribiéndose a mi canal de YouTube.
Código
- mofiza.welcome.code
mofiza.welcome.code C / C ++
#include "ServoTimer2.h" # include # define SD_ChipSelectPin 10 # incluye "TMRpcm.h" #includeTMRpcm tmrpcm; ServoTimer2 matha; // matha significa HEADServoTimer2 lhand; ServoTimer2 rhand; int in1 =6; int in2 =7; int in3 =8; void setup () {matha.attach (2); lhand.attach (3); rhand.attach (4); tmrpcm.speakerPin =9; Serial.begin (9600); if (! SD.begin (SD_ChipSelectPin)) {Serial.println ("SD FAIL"); regreso; }} bucle vacío () {if (! (digitalRead (in3))) {tmrpcm.play ("welcome.wav"); lhand.write (2500); retraso (2000); lhand.write (1200); // retardo de la posición del apretón de manos (9000); } else {lhand.write (300); rhand.write (1700); matha.write (1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robotEsquemas
Proceso de manufactura
- Cree su robot de transmisión de video controlado por Internet con Arduino y Raspberry Pi
- Persianas inteligentes
- Controlar el aceptador de monedas con Arduino
- Obstáculos que evitan el robot con servomotor
- ¡Arduino con Bluetooth para controlar un LED!
- Robot seguidor de línea
- Controlar un robot Roomba con Arduino y un dispositivo Android
- Robot controlado por voz
- Controla el brazo del robot Arduino con la aplicación de Android
- Multiplexor de cargador de batería inteligente con pantalla inteligente
- Crea un robot para comer con Arduino Nano | Tornillo dorado