


Bot de seguimiento humano
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Hola Guyzz ...
En esta pandemia, confío en que todos estén en casa y se mantengan a salvo.
Hice un nuevo proyecto llamado Bot de seguimiento humano.
mira el video completo para hacer este proyecto en casa.
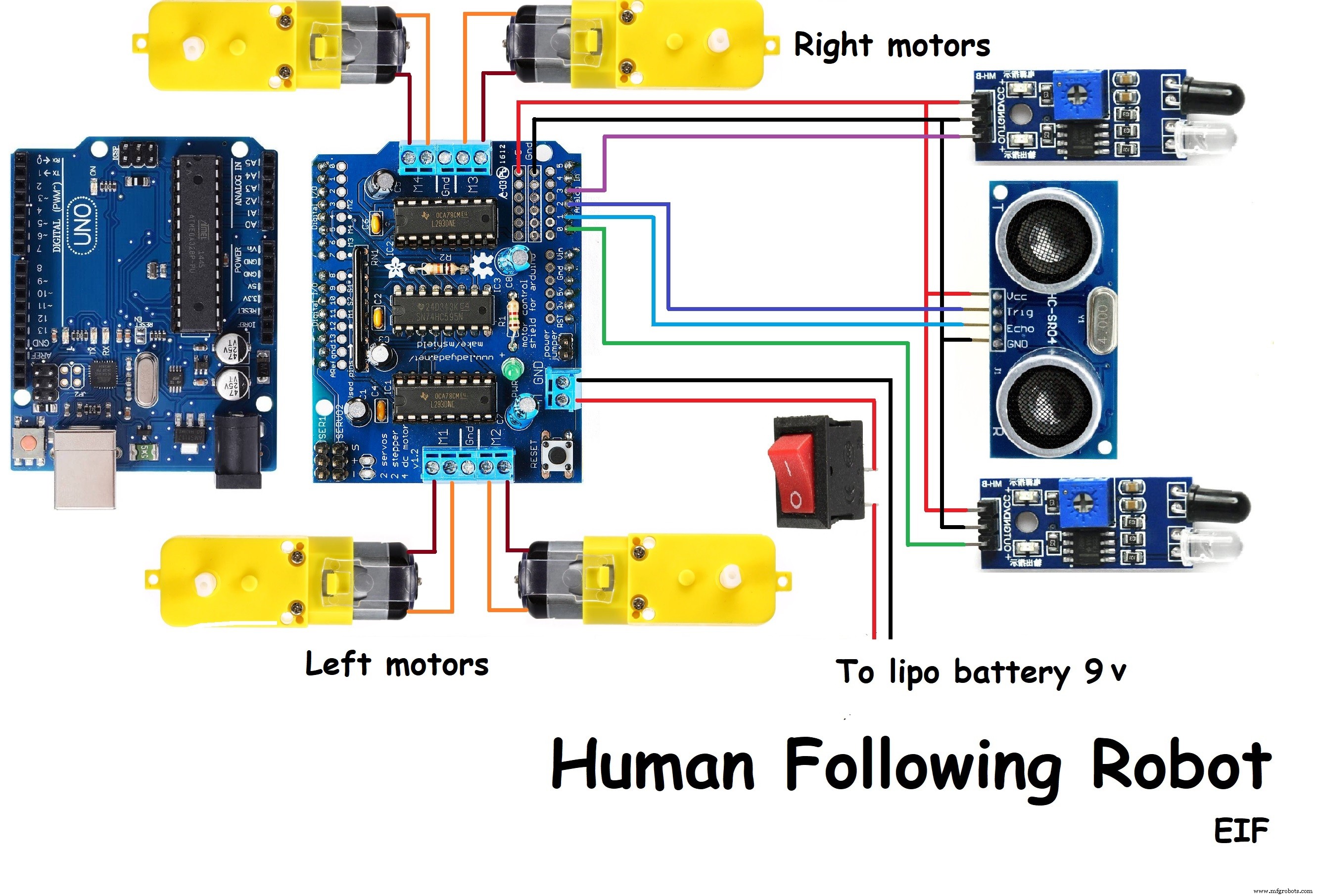
Usó 2 sensores IR y un sensor ultrasónico. Los sensores de infrarrojos se utilizan para seguir al ser humano o al objeto y el sensor ultrasónico se utiliza para hacer retroceder el robot.
Si te gusta este proyecto respétalo.
Dame sugerencias para que pueda mejorarlo o cualquier comentario que quieras dar a mi canal de YouTube.
el enlace es:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
También puedes darme sugerencias sobre "¿Qué hice en el próximo proyecto?"
Pasos para hacer este proyecto:
1. Reúna componentes como Arduino, motorreductores de CC con ruedas, 2 sensores de infrarrojos, sensor ultrasónico, servomotor, cartón, protector de controlador de motor l293d, batería de 9 v, interruptor, cables de puente, etc.
2. Tome cartón y coloque los 4 motores con ruedas para hacer un automóvil.
3. Coloque sensores de infrarrojos en el automóvil.
4. Pegue el servomotor en el automóvil.
5. Coloque el sensor ultrasónico en la caja y agréguele la manija, luego conéctelo al servomotor.
6. Conecte arduino y el protector del motor l293d en el automóvil.
7. Realice las conexiones como se muestra en el diagrama de circuito.
8. Cargue el código y conecte el interruptor con la batería al protector del controlador del motor l293d.
Ajuste la sensibilidad de los sensores de infrarrojos.
Tu proyecto está listo ... !!!
Visite mi canal de YouTube una vez y vea más proyectos interesantes.
"La electrónica es divertida"
Si te gusta mi canal suscríbete por favor.
enlace:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Código
- Código
Código Arduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0 # define echopin A1 // echo pin # define trigpin A2 // Trigger pin #define DERECHA A3AF_DCMotor Motor1 (1, MOTOR12_1KHZ); AF_DCMotor Motor2 (2, MOTOR12_1KHZ); AF_DCMotor Motor3 (3, MOTOR34_1KHZ); AF_DCMotor Motor4 (4, MOTOR34_1KHZ); Servo myservo; int pos =0; long time; void setup () {Serial.begin (9600); myservo.attach (10); for (pos =90; pos <=180; pos + =1) {myservo.write (pos); retardo (15);} for (pos =180; pos> =0; pos- =1) {miservo.write (pos); retardo (15);} for (pos =0; pos <=90; pos + =1) {myservo.write (pos); delay (15);} pinMode (DERECHA, ENTRADA); pinMode (IZQUIERDA, ENTRADA); pinMode (trigpin, SALIDA); pinMode (echopin, ENTRADA);} bucle vacío () {unsigned int distancia =read_cm (); int Right_Value =digitalRead (RIGHT); int Left_Value =digitalRead (LEFT); Serial.print ("R ="); Serial.print (Right_Value); Serial.print ("L =" ); Serial.print (Left_Value); Serial.print ("D ="); Serial.println (distancia); if ((Right_Value ==1) &&(distancia> =10 &&distancia <=30) &&(Left_Value ==1)) {forword ();} else if ((Right_Value ==0) &&(Left_Value ==1) ) {turnRight ();} else if ((Right_Value ==1) &&(Left_Value ==0)) {turnLeft ();} else if ((Right_Value ==1) &&(Left_Value ==1)) {stop ( );} else if (distancia> 5 &&distancia <10) {parada ();} else if (distancia <5) {backword ();} delay (50);} long read_cm () {digitalWrite (trigpin, LOW); delayMicroseconds (2); digitalWrite (trigpin, HIGH); delayMicroseconds (10); time =pulseIn (echopin, HIGH); return time / 29/2;} void forword () {// enciéndalo avanzando Motor1.setSpeed (120); Motor1.run (FORWARD); Motor2.setSpeed (120); Motor2.run (FORWARD); Motor3.setSpeed (120); Motor3.run (FORWARD); Motor4.setSpeed (120); Motor4.run (FORWARD);} void backword () {// al revésMotor1.setSpeed (120); Motor1.run (BACKWARD); Motor2.setSpeed (120); Motor2.run (HACIA ATRÁS); Motor3.setSpeed (120); Motor3.run (HACIA ATRÁS); Motor4.setSpeed (120); Motor4.run (HACIA ATRÁS); } void turnRight () {// el otro rightMotor1.setSpeed (200); Motor1.run (FORWARD); Motor2.setSpeed (200); Motor2.run (FORWARD); Motor3.setSpeed (100); Motor3.run (BACKWARD ); Motor4.setSpeed (100); Motor4.run (BACKWARD);} void turnLeft () {// lo enciende yendo a la izquierdaMotor1.setSpeed (100); Motor1.run (BACKWARD); Motor2.setSpeed (100); Motor2 .run (BACKWARD); Motor3.setSpeed (200); Motor3.run (FORWARD); Motor4.setSpeed (200); Motor4.run (FORWARD);} void stop () {// detenidoMotor1.setSpeed (0); Motor1.run (RELEASE); Motor2.setSpeed (0); Motor2.run (RELEASE); Motor3.setSpeed (0); Motor3.run (RELEASE); Motor4.setSpeed (0); Motor4.run (RELEASE); }
Esquemas
Proceso de manufactura