


Can Bus Shield:Comprender todo sobre este controlador automotriz
En ese momento, la tecnología automotriz no era tan avanzada como lo es ahora. Se produjeron varias innovaciones, una de las cuales fue el escudo Can bus. Con él, los vehículos modernos ahora son más inteligentes. Ahora está disponible información como las rpm reales del motor y la velocidad del vehículo a través del circuito eléctrico del automóvil.
Por lo tanto, su popularidad no sorprende debido a su confiabilidad y velocidad de comunicación media. Posteriormente, discutimos las capacidades de Can-bus y cómo usarlas con microcontroladores.
1. ¿Qué es el Can Bus?
El escudo Can-Bus es un controlador industrial que se encuentra en las máquinas herramienta modernas. Un buen ejemplo involucra el diagnóstico a bordo, que usa un mensaje válido de mini motores o un TIPM para operar funciones electrónicas.
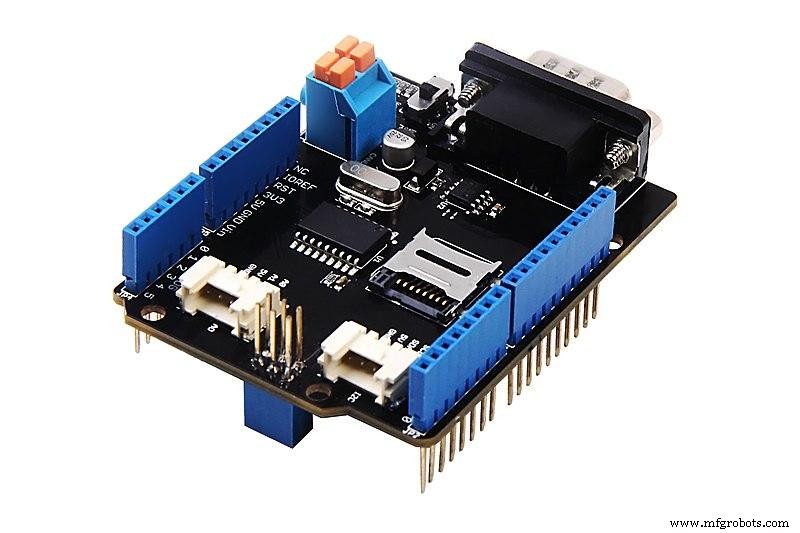
(Un chip Can-bus shield V2).
https://commons.wikimedia.org/wiki/File:CAN_BUS_Shield_V2.jpg
2. Características
El escudo Can-bus tiene varias características que lo hacen único y efectivo. Incluyen:
- El pin CS es compatible con el almacenamiento de datos de la tarjeta TF y tiene una ranura para tarjeta SD para el almacenamiento de mensajes.
- Normalmente, su pinout estándar tiene un pin de selección de chip intercambiable.
- Utiliza tramas remotas CAN versión 2 con una velocidad de datos de 1 MB por segundo.
- Además, su asignación de pines predeterminada utiliza un conector sub-D estándar industrial con nueve pines.
- Además, permite una función seleccionable de asignación de pines CAN y OBD-II.
- Además, tiene un pin INT reemplazable.
- Otra gran característica es la compatibilidad con un marco estándar, dos métodos de recepción y la compatibilidad con la interfaz estándar de Arduino.
- Aún así, tiene conectores de módulo Can-bus de Grove para UART e I2C.
3. Hardware y software
A. Herrajes
- Interfaz de alimentación DB9.
- V_OBD.
- Indicadores LED:
- ENERGÍA:
- Texas.
- RX. V_OBD.
- INT
- Terminales:para CAN_L y CAN_H.
- Asignación de pines de Arduino UNO.
- Conectores serie Grove.
- Conectores Grove I2C.
- clavijas ICSP.
- MCP2551 Controlador Can-bus – Transceptor CAN de alta velocidad.
- MCP2515 Controlador Can-bus:controlador CAN singular integrado con una interfaz SPI.
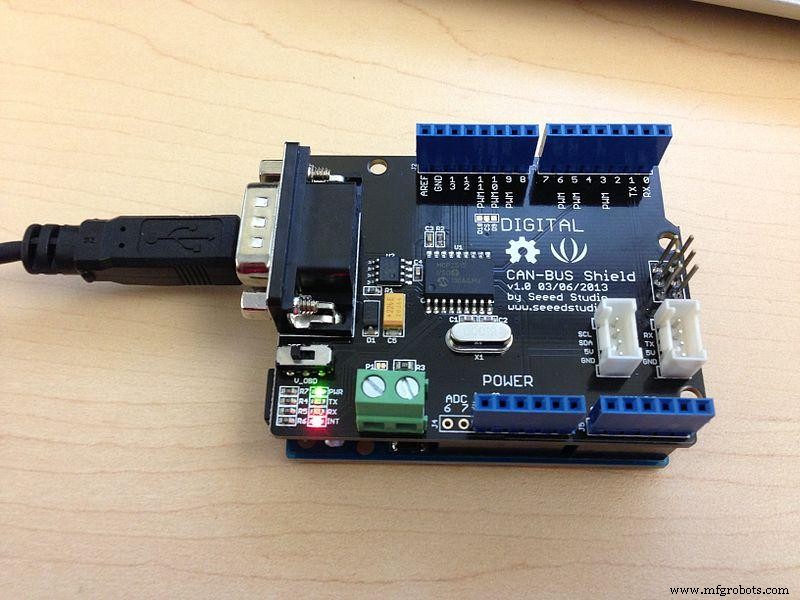
(Un escudo Can-bus con Arduino Uno).
https://commons.wikimedia.org/wiki/File:Arduino_Uno_with_CAN-bus_shield.JPG
B. programa
Generalmente, el software es compatible con las interfaces estándar de Arduino como Arduino Uno, Arduino Leonardo o Arduino MEGA.
4. ¿Cómo funciona Can-bus Shield?
https://www.youtube.com/watch?v=PEI5EWSgaRk
(Este video le muestra cómo funciona un escudo Can-bus).
5. Operación básica de Can Bus Shield
Para comenzar a operar el escudo Can-bus, debe seguir los pasos a continuación.
Materiales necesarios
- 2 blindajes CAN-bus para comunicación CAN-bus SPI.
- 2 microcontroladores Seeeduino V4.2.
- Cables de puente para la conexión de pantallas Can-bus y controladores Seeeduino.
Conexión de hardware
En primer lugar, debes colocar los dos escudos Can-bus en el Seeeduino versión 4.2. Luego, conecta estos dos protectores de bus CAN con cables de puente. Conéctelos así:
CAN_L a CAN_L y CAN_H a CAN_H.
Instalación de software
Para la instalación del software, debe consultar la biblioteca Arduino para el Can-Bus. Después de eso, configure un nodo como Maestro mientras que el otro funciona como Esclavo.
Código
Cargue el código apropiado en el IDE de Arduino para terminar de programar su escudo Can-bus.
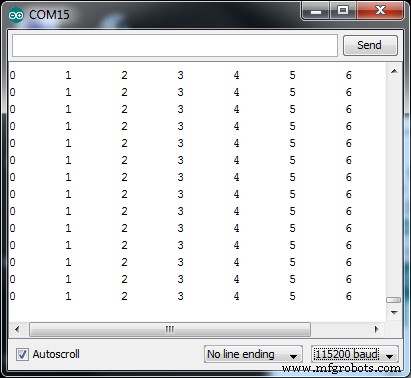
(Un monitor en serie que muestra los datos enviados y recibidos entre dos escudos Can-bus).
6. Preguntas frecuentes
¿Can-bus Shields es compatible con Arduino?
Sí. El controlador es totalmente compatible con Arduino Uno, Arduino MEGA y Arduino Leonardo.
¿Cómo cambiar el pin SS?
Siga los pocos pasos a continuación:
- Primero, use un cuchillo para cortar el cable de cobre entre digital ten y CS.
- Luego, suelde el cable de cobre para conectarlo a D9.
- Después, ve a la biblioteca y cambia el pin SS según corresponda.
La inicialización de escudos CAN-BUS falla
Para Can-bus shield V1.1 a Can-bus shield V2 y superior, debe modificar el código de la siguiente manera:
MCP_CAN CAN(9); // Establecer CS en el pin 9.
Conclusión
En resumen, los CAN Bus Shields son excelentes para aplicaciones automotrices. Sin embargo, con la ayuda de un microcontrolador Arduino, se ejecuta en códigos para controlar varios elementos en el tablero de su automóvil.
Entonces, construir y programar proyectos asombrosos con el módulo de escudos Can-bus se hizo más fácil. Por eso, contáctenos si necesita asistencia profesional en la construcción de proyectos como estos. Bienvenido a contactarnos.
Tecnología Industrial
- Arduino Spybot
- Controlador Arduino GrowBox
- Invernadero domótico
- La fábrica inteligente de Industry 4.0 tiene que ver con esos datos
- Todo sobre el oxicombustible
- Tecnología de montaje en superficie:¿de qué se trata?
- Todo sobre la fundición de precisión para aplicaciones aeroespaciales
- Comprender de qué se trata el hundimiento de troquel EDM
- Comprender de qué se trata el mecanizado duro
- Comprender un motor automotriz
- Comprender un relé automotriz