


Cómo lograr un seguimiento de movimiento preciso en los portátiles de consumo
Nuestras vidas han sido transformadas por dispositivos portátiles conectados, más obviamente el teléfono inteligente, pero también una multitud de otros, como relojes inteligentes, rastreadores de actividad física y dispositivos para escuchar. Estos dispositivos combinan la recopilación de datos respaldada con potencia de procesamiento y conectividad inalámbrica.
Pero, entre todas sus otras características, es fácil pasar por alto la importancia de los sensores de movimiento para hacer que nuestros dispositivos sean más funcionales e intuitivos. Ya sea cambiando la orientación de la pantalla en nuestros teléfonos, contando los pasos en un reloj inteligente, haciendo coincidir los movimientos de nuestra cabeza con nuestras gafas XR o tocando los auriculares para cambiar la canción, la detección de movimiento es una parte vital de la experiencia y la interfaz del usuario.
Para los ingenieros integrados, elegir e integrar sensores de movimiento puede resultar complicado. ¿Cómo puede asegurarse de elegir la tecnología adecuada para obtener la precisión que necesita, sin aumentar innecesariamente los costos o el consumo de energía? ¿Y cómo debe asegurarse de aprovechar al máximo los sensores y no perderse el rendimiento o las funciones que podrían mejorar su producto final?
Fundamentos de los sensores de movimiento
Primero, un breve resumen de lo que entendemos por sensores de movimiento. Hay tres tipos de uso común:acelerómetro, giroscopio y magnetómetro.
El acelerómetro mide la aceleración, que puede incluir la aceleración debida a la gravedad. Esto significa que puede detectar la dirección de la gravedad en relación con el sensor, básicamente, en qué dirección está hacia arriba. El giroscopio mide el cambio en la posición angular midiendo la velocidad angular.
Con tres grados de libertad, o ejes, para cada acelerómetro y giroscopio, la combinación de ambos nos da un sensor de movimiento de 6 ejes, o unidad de medida inercial (IMU) (ver Figura 1). Para muchas aplicaciones, necesitamos agregar un magnetómetro, que mide la fuerza y la dirección del campo magnético de la Tierra, para que podamos estimar nuestro rumbo. Agregar un magnetómetro de 3 ejes encima del acelerómetro y el giroscopio crea una IMU de 9 ejes.
Para los propósitos de esta publicación, vamos a discutir las IMU. Aunque hay ciertas propiedades que discutimos que se pueden aplicar a un acelerómetro, giroscopio o magnetómetro por sí mismos, los desafíos de combinar al menos dos de estos sensores es lo que nos gustaría iluminar.
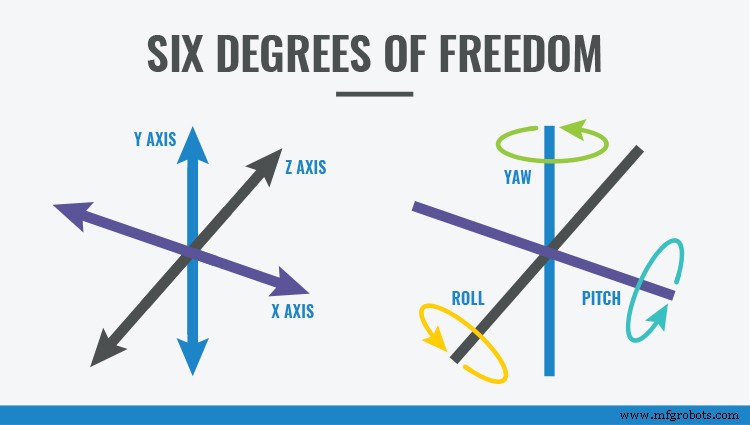
Figura 1:Detección de movimiento con una IMU (Fuente:CEVA)
Manteniéndolo preciso
Así que ahora nos hemos recordado a nosotros mismos la teoría, ¿cómo funciona en la práctica? ¿Cómo podemos obtener la precisión que necesitamos?
Para una IMU, la precisión lograda al determinar el rumbo de nuestro dispositivo es una métrica básica con la que podemos comenzar. Nuestros requisitos pueden estar dentro de uno o dos grados, mientras que una menor precisión podría ser aceptable para otra aplicación. Por ejemplo, los requisitos de precisión de un auricular XR serán mucho más estrictos que los de un juguete robótico para niños. Luego, debemos considerar la estabilidad de estos datos y si variarán con el tiempo y con la temperatura.
Obtener la salida de mayor precisión de nuestra IMU requiere el uso de fusión de sensores, que es el concepto de combinar datos de múltiples sensores para crear una suma mayor que sus partes. Cada sensor de nuestra IMU tiene diferentes fortalezas y debilidades que se pueden fusionar juntos para esa solución.
Una forma de pensar en la fusión de sensores es basarla en la "confianza". En este caso, podemos usar "confianza" para indicar que los datos de un sensor en particular tienen un nivel razonable de confianza en cuanto a su precisión y relevancia. Digamos que eres el presidente de un país y tienes que determinar las políticas. Tienes un asesor económico, sanitario y militar. Cada uno te da su opinión, pero todos conocen áreas diferentes. Tienen conjeturas sobre cómo sus opiniones afectarían a sus contrapartes, pero, lamentablemente, son solo conjeturas. Depende de usted procesar y fusionar su información en la mejor decisión.
Del mismo modo, tiene dos o tres "asesores" a los que puede llamar para obtener datos de orientación de su IMU:el acelerómetro, el giroscopio y, a veces, el magnetómetro. El giroscopio es el más fácil de explicar. Se puede confiar en los giroscopios de grado de consumo para cambios de orientación relativa en períodos cortos de tiempo de unos pocos segundos, pero la salida se desviará en intervalos de tiempo más largos, más de decenas de segundos. El acelerómetro es útil para medir la gravedad a largo plazo, pero puede confundirse con ciertos escenarios, como la aceleración constante en un automóvil. Podemos confiar en el magnetómetro en entornos magnéticos estables, como el campo o el bosque, pero menos cuando hay interferencias magnéticas, por ejemplo, dentro de una oficina construida con pilares de acero.
En resumen, el giroscopio es preciso para mediciones a corto plazo y el acelerómetro y magnetómetro para mediciones a más largo plazo. Con una comprensión cuidadosa de sus limitaciones, sus datos se pueden fusionar para obtener una imagen más precisa de la orientación de un dispositivo.
Cuando tenemos múltiples salidas de sensor, como una IMU de 9 ejes, la fusión de sensores nos brinda la oportunidad de combinar y comparar datos para mejorar la precisión. Por ejemplo, si nuestro software de fusión de sensores incluye un algoritmo para detectar cambios inesperados o repentinos en la salida del magnetómetro debido a la interferencia magnética, automáticamente puede confiar más en los datos del acelerómetro y del giroscopio, hasta que el magnetómetro vuelva a estar estable.
La frecuencia de muestreo también es importante para la precisión:¿el sensor elegido proporciona datos con la frecuencia suficiente para satisfacer sus necesidades? Por supuesto, esto depende de la aplicación:por ejemplo, unas pocas lecturas por segundo pueden ser suficientes para un contador de pasos básico, pero se recomiendan 100 Hz a 400 Hz para la mayoría de las aplicaciones. Sin embargo, es posible que se necesiten frecuencias de muestreo de 1 kHz o más para un seguimiento preciso de la cabeza en aplicaciones XR (XR es un término general para la realidad virtual, mixta y aumentada). Una frecuencia de muestreo rápida también es importante para lograr una baja latencia, que en nuestro ejemplo de seguimiento de la cabeza es la diferencia entre una experiencia de realidad virtual inmersiva y sentirse mareado por el movimiento.
También debemos considerar la calibración. Muchos sensores se suministran "tal cual" con poco más de lo que está escrito en la hoja de datos para que usted lo considere. Cualquier tipo de calibración que se pueda realizar ayudará a maximizar el rendimiento constante entre diferentes sensores individuales. La calibración de fábrica puede ser una forma eficaz de mejorar el rendimiento individual, pero es relativamente cara. La calibración dinámica en el campo es otra opción que requiere una comprensión detallada de los sensores en sí, o al menos de su aplicación. Los sensores experimentan sesgos que, cuando no se tienen en cuenta, pueden afectar negativamente la salida general hasta un punto que exacerba cualquier error existente.
Finalmente, debemos pensar en cómo verificar los datos del sensor que obtuvimos y fusionamos. Si bien esto depende de lo que estemos rastreando, el principio básico es usar otra fuente de información independiente para darnos una verdad con la que podamos comparar nuestro resultado. Por ejemplo, un brazo de robot podría moverse repetidamente con mucha precisión a un punto conocido, y luego podemos ver si nuestros sensores nos dan los mismos datos de posición. Cuando detectamos un error, puede ser posible compensarlo con un cálculo, o puede ser necesario marcarlo como un error que necesita más atención.
Habilitación de nuevas funciones
Una vez que tenemos la capacidad de medir el movimiento con alta precisión, no solo ayuda con las aplicaciones existentes, sino que puede abrir la posibilidad de nuevas capacidades en dispositivos portátiles. Por ejemplo, con los dispositivos audibles (Figura 2), las interfaces de usuario convencionales son problemáticas:los usuarios no quieren comprometerse a sacar su teléfono para controlarlos, y los dispositivos audibles en sí mismos son demasiado pequeños para tener botones convenientes. En su lugar, se pueden usar toques en los sonidos audibles para omitir una canción, y la detección del movimiento de quitárselos de los oídos se puede usar para silenciar todo el audio, ya que es probable que este sea el momento en el que desee que el sonido se detenga de todos modos. El uso de movimiento y "clasificadores", que son algoritmos para identificar diferentes movimientos, conduce a una experiencia de usuario más conveniente e intuitiva.

Figura 2:Hearables (Fuente:CEVA)
La información precisa de los sensores de movimiento también puede significar que su dispositivo portátil tiene más idea de lo que sucede a su alrededor o en qué actividad está involucrado. Esto se conoce como conciencia del contexto y se puede usar para brindar una experiencia más inmersiva, como como reducir el volumen de su música cuando un audible detecta que ha caminado hasta un cruce de peatones para permitirle escuchar la sirena de una ambulancia cercana.
Para las aplicaciones de seguimiento del estado físico, una mayor precisión puede diferenciar entre las diferentes actividades del usuario. Por ejemplo, si su rastreador de pasos puede medir el tamaño, la velocidad u otras características de sus movimientos, puede funcionar si simplemente está caminando normalmente, o tal vez subiendo o bajando escaleras. Combinado con otros datos de sensores, como la presión del aire y la ubicación derivada del GPS, el software puede crear una imagen detallada de sus movimientos y estimar las calorías quemadas.
Armado:fusión de sensores y software
Como hemos comentado, para maximizar la precisión y la utilidad de los datos de movimiento, no es suficiente simplemente producir una fuente de datos sin procesar. Los dispositivos deben procesar los datos, compensar las inexactitudes sistemáticas y combinar la información de varios sensores.
Hay mucho que aprender aquí. La fusión del sensor es complicado y requiere cierto conocimiento para lograr los mejores resultados en un paquete pequeño. Sin embargo, hay varios productos disponibles que integran los sensores y el procesamiento necesarios; por ejemplo, el BNO080 / 085, desarrollado por una asociación entre Bosch y CEVA Hillcrest Labs, incluye un acelerómetro, magnetómetro y giroscopio de alto rendimiento, así como un -Potencia ARM Cortex M0 + MCU de 32 bits.
El software de concentrador de sensores MotionEngine ™ de Hillcrest Labs, que está preprogramado en el BNO085, proporciona seguimiento de movimiento de 6 y 9 ejes, así como funciones inteligentes como clasificar la actividad del usuario como caminar, correr y estar de pie (Figura 3). El concentrador de sensores MotionEngine es compatible con las arquitecturas y sistemas operativos de procesamiento integrados líderes, con versiones especializadas disponibles para dispositivos portátiles, televisores inteligentes, robótica, computación móvil, controles remotos, aplicaciones móviles de bajo consumo y más.
haz clic para ver la imagen en tamaño completo
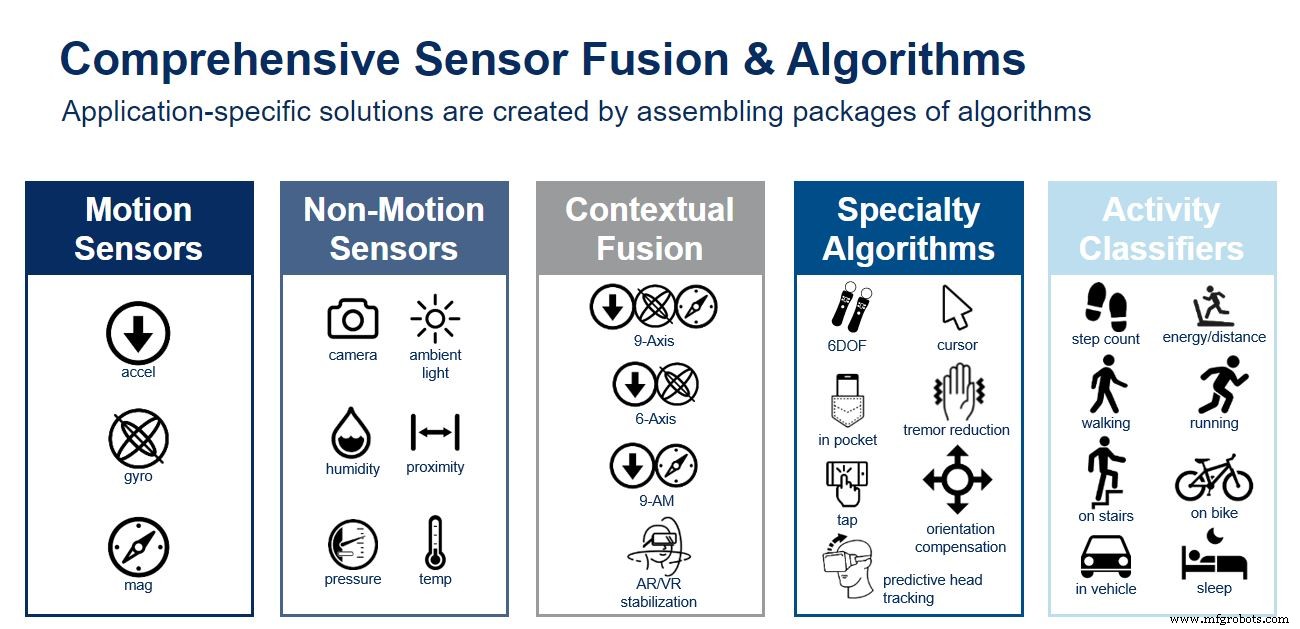
Figura 3:Fusión y algoritmos completos de sensores (Fuente:CEVA)
Reunir todos estos datos, en tiempo real, puede ser un desafío y requiere una cantidad no trivial de rendimiento de procesamiento. Puede ser mejor elegir sensores integrados que ejecuten algunos de estos algoritmos en un núcleo MCU en el dispositivo sensor en sí, en lugar de requerir un procesador de aplicación principal para que se encargue de estas tareas. En particular, para tareas "siempre activas" como el conteo de pasos, si podemos evitar que el procesador principal se active cada vez que se detecta un movimiento, puede permanecer en modo de suspensión, lo que reduce el consumo de energía general y aumenta la duración de la batería. Volviendo a nuestra analogía anterior, un SiP que se centra en la fusión de sensores es como que un vicepresidente se ocupe de ciertas decisiones para que el presidente, el procesador principal, pueda concentrarse en tareas más inmediatas.
Conclusiones
Los sensores de movimiento juegan un papel importante en muchas aplicaciones, pero no siempre es obvio cómo elegir el dispositivo correcto y cómo lograr el grado de precisión necesario para su aplicación, o incluso cuán preciso debe ser. Los diferentes casos de uso requieren diferentes niveles de precisión y tienen diferentes requisitos para el tipo de datos necesarios.
Los sensores integrados y la fusión de sensores a menudo pueden proporcionar una solución a este problema. Al trabajar con un proveedor adecuado, puede asegurarse de no comprometerse en la obtención de datos precisos y confiables, así como funciones de valor agregado para aplicaciones específicas, mientras mantiene el costo y el consumo de energía al mínimo.
Incrustado
- Seguimiento de ADC
- Entrevista con el experto:Jonathan Warbrick de Graphite Additive Manufacturing sobre cómo lograr el éxito con la impresión 3D
- El futuro es… Colaboración
- ¿Qué precisión debe tener su sistema de seguimiento de activos?
- ST:sensor de movimiento con aprendizaje automático para un seguimiento de la actividad de alta precisión y fácil de usar
- Los sensores de movimiento admiten requisitos de tolerancia a fallos
- Seguimiento de Raspberry Pi Ball
- Sensor de movimiento con Raspberry Pi
- Tecnología de movimiento lineal
- Sistema de seguimiento de movimiento 3D para tecnología autónoma
- Insignias en PwC