


Cómo diseñar un controlador de lógica difusa
Los controladores de lógica difusa están, literalmente, a nuestro alrededor. Desde los sistemas antibloqueo de frenos hasta las lavadoras que limpian nuestra ropa. Pero, ¿realmente funcionan? ¿Y cuáles son los beneficios de usarlos?

Figura 1. El mecanizado moderno a menudo depende de la lógica difusa para controlar los aspectos críticos del proceso. Imagen utilizada por cortesía de Michael Schwarzenberger
Lógica de escalera y lógica difusa
Un buen punto de partida para aprender acerca de los controles de lógica difusa es determinar si la lógica de escalera es compatible con la lógica difusa. La lógica de escalera es un enfoque basado en reglas de uso común para programar PLC (controladores lógicos programables) cuando se necesita lógica secuencial. Cada uno de los peldaños en un programa de lógica de escalera representa una ecuación lógica que es binaria o discreta.
Teniendo en cuenta que la lógica de escalera se lee de izquierda a derecha, de arriba a abajo, entonces el lado derecho de un escalón representa la condición de salida. La condición de salida de ese renglón depende del resultado de los símbolos de lógica de escalera a la izquierda de la salida.
Tome, como ejemplo básico, el único escalón que se muestra en la figura 2. Observe que el A / C (aire acondicionado) solo está activo cuando el interruptor está activo y HighTemp o Humid está activo.
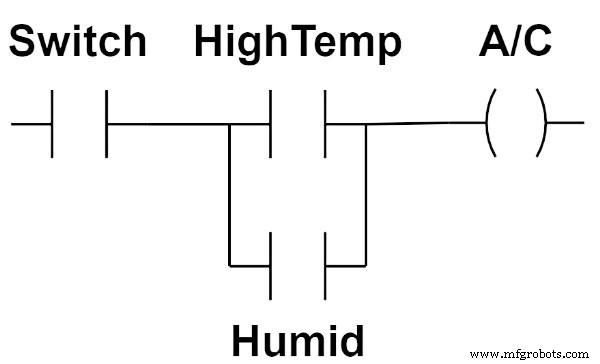
Figura 2. Peldaño de lógica de escalera para controlar un sistema de A / C. Información utilizada por cortesía de Wikipedia
Expresado como regla, este renglón tomaría la siguiente forma:
A / C =Interruptor Y (temperatura alta o humedad)
Debido a que la lógica de escalera se puede expresar como reglas, se presta fácilmente a la adopción en el control de lógica difusa. Otra forma de pensar en esto es que el resultado depende de las condiciones IF representadas por los símbolos de lógica de escalera a la izquierda, mientras que la salida representa el resultado ENTONCES.
SI (Cambiar Y [Alta temperatura o humedad]) ENTONCES A / C
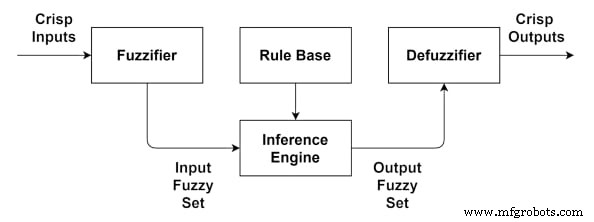
Figura 3. Diagrama de bloques que representa un sistema de lógica difusa.
Este enfoque ciertamente se puede implementar utilizando reglas de lógica difusa. En tal caso, las entradas más claras serían la temperatura y la humedad relativa. La lectura del sensor de estos valores se transformaría en entradas difusas mediante un difusor. El motor de inferencia contendría, entre otras reglas, la que se muestra arriba. Basado en las reglas del motor de inferencia, se presentaría un conjunto de salida difusa al defuzzificador. A partir de ahí, se proporcionarían salidas nítidas al sistema de control.
En resumen, la lógica de escalera se puede implementar mediante lógica difusa.
Pasos básicos para diseñar un controlador de lógica difusa
Los sistemas de control de lógica difusa (a menudo abreviado FLC) son un enfoque alternativo para desarrollar e implementar sistemas de control.

Figura 4. Sistema de control de retroalimentación simple que implementa control difuso. Imagen utilizada por cortesía de Boffy b
Reconozca las suposiciones involucradas
Antes de comenzar el proceso de diseño de un FLC, existen ciertos supuestos clave.
- Existe una solución al problema de control.
- Una solución "suficientemente buena" es aceptable en lugar de una "solución óptima".
- Las variables de entrada, salida y estado se pueden observar y usar para controlar.
- Existe un conjunto de conocimientos en forma de:
- Reglas lingüísticas y / o
- Un conjunto de datos de entrada y salida del cual se pueden extraer reglas.
- El FLC debe estar diseñado para lograr un rango de precisión aceptable.
- La estabilidad y la optimización no se abordan explícitamente, pero están abiertas.
Identifique y configure las variables para la fuzzificación
El primer paso en el diseño de un FLC es identificar las variables de entrada, salida y estado involucradas. A continuación, determine los subconjuntos difusos de las variables. Por ejemplo, la entrada de temperatura se puede dividir en cinco subconjuntos con una etiqueta lingüística descriptiva para cada uno:{"frío", "frío", "nominal", "cálido", "caliente"}.
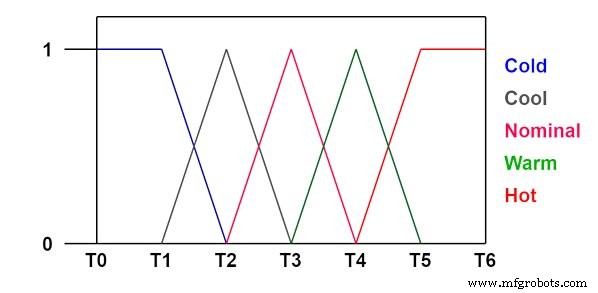
Figura 5. Ejemplo de uso de funciones de pertenencia para representar la temperatura.
Una vez que se han elegido los subconjuntos para las variables, las funciones de pertenencia deben configurarse para representar estos subconjuntos. Las opciones para las funciones de pertenencia incluyen triangular, trapezoidal, sigmoidea y gaussiana. Esto constituye el difusor que convierte las entradas nítidas en valores difusos. Tenga en cuenta que los subconjuntos difusos y las funciones de membresía asociadas también deben configurarse para la salida del motor de inferencia .
Genere las reglas de lógica difusa
La conversión de un controlador de lógica de escalera tradicional en un controlador de lógica difusa comienza con la generación de reglas de lógica difusa.
Aludido en los supuestos, esto puede tomar la forma de reglas lingüísticas que ya existen o pueden desarrollarse con la ayuda de un experto en la materia. Las reglas también se pueden generar dado un conjunto de datos de entrada y salida. Y, en el caso de la lógica de escalera, las reglas de lógica difusa se pueden leer directamente desde el diagrama de escalera.
El resultado es la base de reglas para el sistema difuso.
Implementación del motor de inferencia y el defuzzifier
Hay varios enfoques diferentes para implementar el motor de inferencia . En los controles, los dos enfoques más populares son Mamdani y Sugeno. Ambos tipos de motores de inferencia combinan la salida difusa de la base de reglas mediante un operador OR y, posteriormente, desenfoca esa salida para obtener un valor nítido.
Aplicaciones de controladores de lógica difusa
Los controladores de lógica difusa han encontrado un uso extremadamente extendido. Por ejemplo, los ascensores a menudo tienen controladores de lógica difusa que reducen el tiempo de espera, minimizan los viajes entre pisos y reducen el uso de energía. Un beneficio adicional para minimizar el desplazamiento entre pisos es el menor desgaste de los componentes críticos y una vida útil más prolongada.
Otro ejemplo fascinante de sistemas de control difuso son las videocámaras y videocámaras digitales. Los operadores pueden mover o agitar la cámara mientras filman una toma consistente, pero el control de lógica difusa puede compensar automáticamente.
En un entorno industrial, la lógica difusa se utiliza a menudo para controlar procesos y sistemas industriales. Por ejemplo, la lógica difusa funciona bien con controladores de temperatura y procesos, como los que se utilizan con el tratamiento térmico de metales. Los tratamientos térmicos típicos implican ciclos de rampa y remojo de alta precisión para lograr las propiedades metalúrgicas correctas.
Las aplicaciones similares que se benefician del FLC incluyen el curado de caucho o el secado de solventes en superficies pintadas. Además, todos estos son ejemplos de procesos de control que normalmente utilizan un controlador PID (derivado integral proporcional). El mecanizado CNC (control numérico por computadora) a menudo depende de controladores de lógica difusa, al igual que muchos robótica autónoma, visión artificial y detección remota.
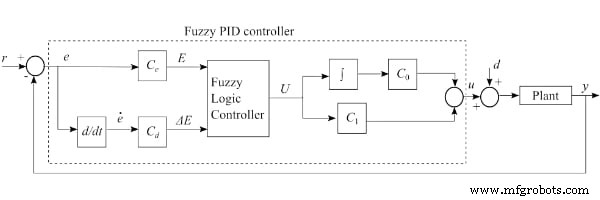
Figura 6. Diagrama de bloques para un controlador Fuzzy PID. Imagen utilizada por cortesía de Mathworks
Ventajas y desventajas del control de lógica difusa
El control de lógica difusa aún puede funcionar cuando se enfrenta a datos imprecisos y no linealidad en el sistema. También permite que la experiencia y el conocimiento humanos se integren en un sistema de control y es altamente personalizable. Los sistemas de control de lógica difusa son generalmente más baratos de desarrollar en comparación con los enfoques más tradicionales y tienden a ser más eficientes, robustos y confiables.
Específicamente, en los controles, FLC no requiere que el modelo y / o el objetivo se formulen en términos precisos como se requiere en un enfoque más tradicional de los sistemas de control. Además, los controles difusos se pueden combinar fácilmente con otros sistemas de control.
Por supuesto, existen inconvenientes en el uso de sistemas de control difusos. Si bien la lógica difusa es un subconjunto de la inteligencia artificial (IA), no es un tipo de aprendizaje automático y, por lo tanto, no puede adaptarse y aprender. Hay controladores adaptativos de lógica difusa, pero su diseño y complejidad van mucho más allá del tipo de controlador difuso en discusión.
Además, eventualmente será necesario realizar actualizaciones a las reglas de las que depende el controlador, y los controladores de lógica difusa requieren pruebas y validaciones exhaustivas antes de que se consideren listos para la implementación.
¿Cuándo se debe utilizar un controlador de lógica difusa? Son una excelente opción para problemas de control que son extremadamente complejos y difíciles de representar utilizando modelos y objetivos precisos. Funcionan bien cuando se trata de datos imprecisos y comportamiento no lineal. También son una buena opción cuando se puede aportar al sistema la experiencia y los conocimientos humanos. ¿Cómo usa la lógica difusa en su sistema de control? ¿O solo usa controladores PID?
Robot industrial
- Cómo diseñar productos de plástico transparentes
- Diseño para la fabricación:una guía práctica
- Cómo agregar una antena cambia el proceso de diseño
- Cómo crear un controlador PWM en VHDL
- Cómo la realidad virtual puede ayudar a informar el diseño de robots industriales
- Cómo documentar cables y arneses
- Cómo elegir un controlador de automatización industrial
- Cómo seleccionar un controlador
- Cómo vencer las interferencias en el diseño de PCB
- Cómo optimizar el diseño HDI en electrónica
- Cómo diseñar bisagras vivas impresas en 3D