


Minialevador
Componentes y suministros
 |
| × | 1 |
Herramientas y máquinas necesarias
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Este es un ascensor de 5 pisos que funciona. Mide 3 pies de alto. Trabajamos mucho en esto.
Vayamos al grano ... ¡así es como funciona!
Enlaces rápidos:
- Código
- Diagrama de cableado (próximamente)
Inspiración
Hemos estado jugando con Arduino y el procesamiento integrado / IoT durante un par de años, pero la mayoría de los proyectos que hemos hecho (y la mayoría que hemos visto) son bastante simples. Hemos estado buscando algo "real" que hacer durante mucho tiempo.
Este verano, fui a un campamento de verano increíble, Project Ember. ¡Está en el área de la bahía de San Francisco y es increíble! Los niños diseñan y construyen grandes estructuras de madera con herramientas eléctricas. Una vez que supe que podía hacer eso, quise combinar el edificio físico con Arduino y este es el resultado.
Acercamiento
La parte más difícil de resolver esto fue la técnica de detección del motor y el piso. Un ascensor real probablemente usa un enorme motor de A / C con sensores en cada piso. Ciertamente podríamos usar este enfoque con una escala más pequeña, pero colocar sensores en cada piso es mucho cableado, y nos preocuparía la sensibilidad y la alineación, etc. Por otro lado, un motor paso a paso se puede colocar con precisión ... pero nosotros tendría que saber exactamente dónde estamos y qué tan lejos tenemos que llegar para hacerlo.
Afortunadamente, hemos hecho algo similar en nuestro proyecto anterior de "calendario elegante". Allí, habíamos descubierto cómo usar motores paso a paso y, lo que es más interesante, guardar sus posiciones en la memoria no volátil (EEPROM en Arduino). Así que usaremos el mismo enfoque aquí. De esta manera, no necesitamos ningún sensor de posición, solo contaremos con nuestra capacidad para contar la cantidad de pasos que movemos con nuestro motor paso a paso.
La otra preocupación de diseño fue con los botones de llamada del ascensor. Deben encenderse interruptores de contacto momentáneos, pero las luces deben poder controlarse independientemente del botón. Encontramos algunos adecuados en eBay.
Materiales
Botones con luces independientes (los compramos en eBay, deberían verse así:


- Un Arduino Mega2560:elegimos este porque tenía más pines GPIO para todos los detalles del proyecto. Comprar oficial:es posible que pueda obtener una imitación / compatible más barata.
- Una matriz de LED de 8 × 8 para mostrar flechas Comprar (Amazon)
- Una pantalla de siete segmentos para mostrar los números de piso Comprar (SparkFun)
- Un motor paso a paso y una placa de controlador para mover el automóvil. Compre un paquete de 5 (Elegoo) Nota:solo usa uno, pero es posible que necesite más. Y puedes reutilizar la caja en la que vienen. 🙂
- Un protoboard Mega2560, para conectar nuestros cables Compre (BangGood) Desoldamos el encabezado en la parte superior, no es necesario.
- Terminales de tornillo (10 × 2) Compre (frys.com) Necesitará 4
- carrete de hilo
Puede encontrar todos los materiales a continuación en su Home Depot local u otra tienda de mejoras para el hogar:
- Tablero de fibra y moldura de 3/4 sq in para el ascensor y la cabina.
- Soporte angular de aluminio para sujetar el motor
- Tornillos surtidos
- Manguera para actuar como buje dentro del carrete
- Cuerda (utilizamos una cuerda de nailon resistente para cometas)
Construir
Hicimos el eje y el carro con tableros de fibra y molduras para reforzar las esquinas.
Empezamos por el hueco del ascensor. Cortamos 3 piezas de tablero de fibra a 36 ″ x8 ″ para los lados y la parte trasera (el frente está abierto). Luego, usando 4 piezas de moldura cuadrada de 3/4 ″, 36 ″ de largo, atornillamos el tablero de fibra para hacer un eje vertical. Las piezas cuadradas de tablero de fibra en la parte superior e inferior mantienen todo cuadrado.
La cabina del ascensor está al lado. Utiliza el mismo tipo de construcción, con paredes, cielo raso y pisos de tableros de fibra y soportes de moldura de pino. Tiene casi todo el ancho del eje, pero se extiende entre el frente y la parte posterior del pino (por lo que es más ancho que profundo). Colocamos un gancho de ojo en la parte superior del automóvil, de modo que cuelgue de una cuerda.

¡Asegúrese de no poner fondo en su eje demasiado pronto, porque necesita poder entrar y salir del automóvil! Una vez completada la prueba, puede agregar la parte inferior.
El motor se encuentra en la parte superior del ascensor. Adjuntamos un carrete de madera normal (de hilo de coser) al eje del motor. Esto es un poco complicado. El eje del motor tiene un borde plano pero, por supuesto, el orificio del carrete es redondo. Entonces perforamos y golpeamos un agujero en el carrete, y colocamos un tornillo para sujetarlo contra el borde plano del eje del motor. Además, el orificio del carrete es más grande que el eje del motor. Para actuar como un casquillo para ocupar el espacio, usamos un trozo muy corto de manguera de goma del tamaño apropiado.

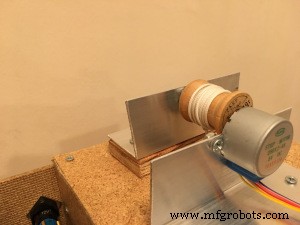
Luego montamos el motor en una pieza de aluminio angular y la atornillamos a la parte superior del eje. Para sostener el otro lado del carrete, pasamos un tornillo por una segunda pieza de aluminio angular. Esto hace que el peso del elevador no tire del carrete del eje del motor, se mantendrá nivelado.
Usamos más tableros de fibra para hacer los paneles de botones. A la izquierda, usamos una tabla de la altura del eje para los botones de llamada. Usamos botones rojos y verdes alternos. Rojo para abajo, verde para arriba. El piso superior solo tiene un rojo y el inferior solo un verde. Nuestro panel "en ascensor" está a la derecha. Cortamos agujeros para la matriz de LED y la pantalla de siete segmentos, además de los 5 agujeros para los botones.


Montamos 4 cajas de tornillos. Dos en el panel de llamadas y dos en el lateral junto al panel del ascensor "interior".
Cableado
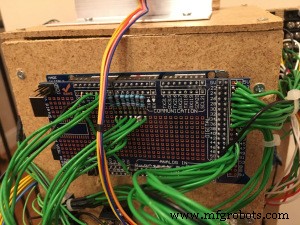
¡El cableado es complicado porque hay mucho! Elegimos usar un escudo de creación de prototipos Arduino Mega, en parte porque ya teníamos uno :-). Pero la verdadera motivación era que con tantos cables, nos preocupaba que algo se desconectara inevitablemente si usábamos las conexiones de pines estándar de Arduino. Con el protector de prototipos, podríamos soldar cables directamente y evitar ese riesgo. Además, nos brindó un lugar conveniente para colocar cosas como resistencias, que son necesarias para nuestra pantalla de 7 segmentos.
Dicho esto, no queríamos que todos estos paneles diferentes estuvieran conectados juntos, porque si cometíamos un error, sería muy difícil de arreglar. Así que cada cable tiene algún tipo de extremo extraíble. Usamos bloques de tornillos entre los paneles de interruptores y el Arduino, y para la matriz de LED y 7 segmentos, un extremo del cable todavía son pines de desconexión rápida.
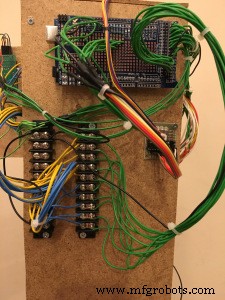
Para los paneles de botones, hicimos nuestros propios arneses de cableado, utilizando conectores de horquilla hembra engarzados que encajan perfectamente en los terminales de los botones. Debido a que cada botón necesitaba dos conexiones a tierra (una para el botón y otra separada para la luz), habría MUCHOS cables de tierra si los hubiésemos pasado todos al Arduino. Así que, en cambio, los conectamos en cadena con un bonito arnés de cableado personalizado. Los pines de señal (uno para el interruptor y otro para la luz en cada botón) están todos separados y van hacia los bloques de tornillos.


Finalmente, los bloques de tornillos nos dieron otra ventaja:usamos alambre de núcleo sólido para soldar al protector de prototipos, pero usamos alambre trenzado para los conectores engarzados en la parte posterior de los botones. Los bloques de tornillos nos dieron un lugar para cambiar de uno a otro sin soldar.
Programación
Tuvimos muchas revisiones de código, pero aquí está la versión actual. La parte más complicada del software es la lógica para averiguar dónde debe ir la cabina del ascensor. Si está en el piso 2, alguien dentro quiere ir al 3, alguien quiere bajar del 4 y subir del 1 ... ¿a dónde vas primero?
La otra parte complicada es que la forma en que funciona normalmente la biblioteca de motores paso a paso es que durante el tiempo que el motor está en movimiento, nada llama a la función “loop ()” de Arduino. Sin embargo, debería funcionar que alguien presione un botón mientras el ascensor está en tránsito. Por lo tanto, no puede ir hasta el destino en un solo paso; debe moverse poco a poco, verificando si se presionan botones (y posiblemente cambios en el destino) en el camino.
Puede descargar nuestro boceto de Arduino aquí.
Para cargar el código:
Deberá descargar estas bibliotecas:
- LEDControlMS
- SevenSeg
Sube el código:
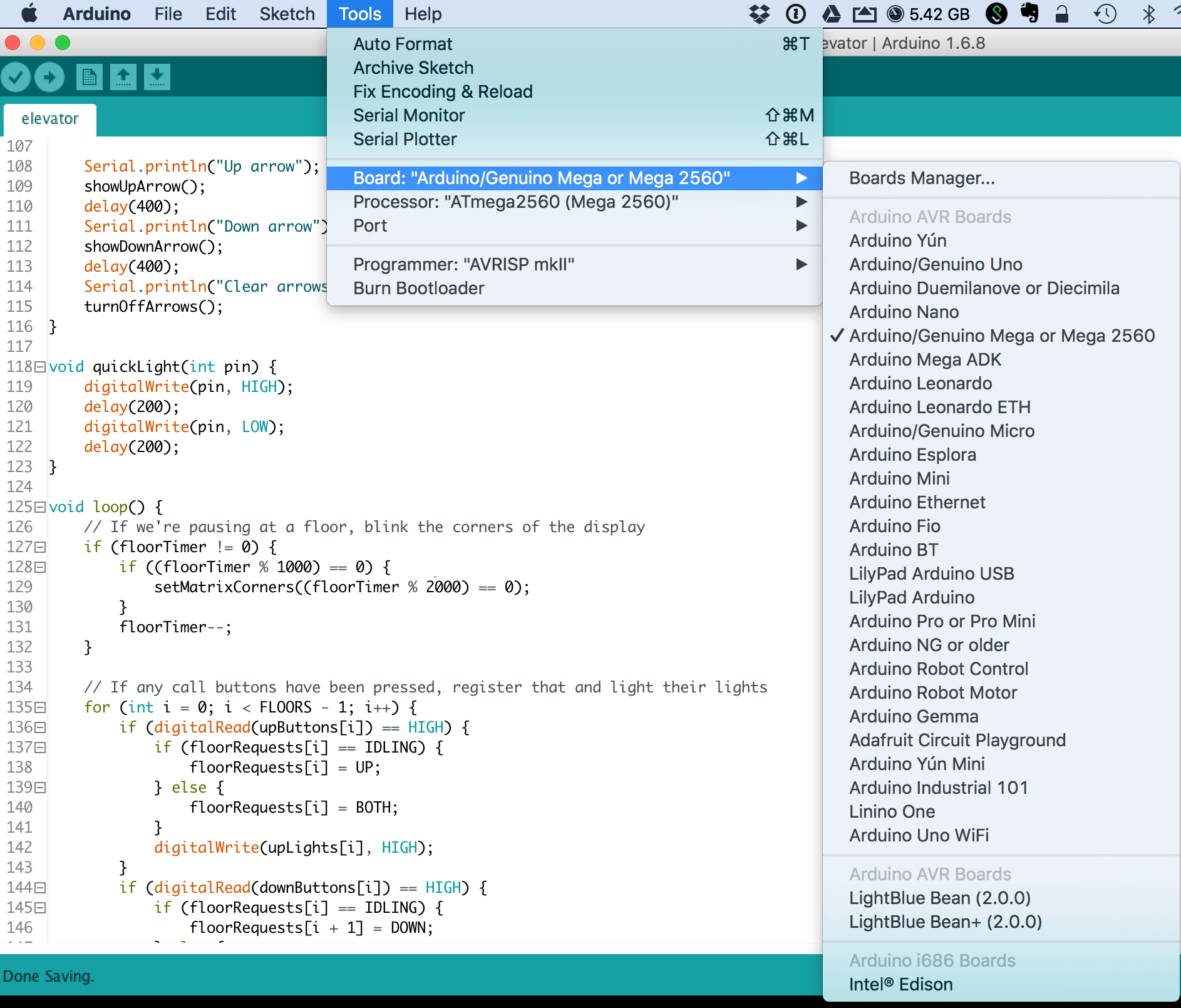
- Elija la tabla adecuada:vea esta imagen
- Elija el puerto:Similar, pero vaya a "Puerto". En MacOS, será algo como /dev/cu.usbmodem1411, mientras que en Windows, será algo como COM2.
- Sube tu código.
Si lo hizo, ¡enhorabuena! Continúe con las pruebas. Si no fue así, vuelva al paso 5. Si eso no funcionó nuevamente, vuelva a verificar su cableado. Si eso no funcionó, contáctenos usando el enlace en la parte superior.
- Descargue el IDE de Arduino. arduino.cc
- Abra el código.
- Para instalar bibliotecas, consulte este tutorial.
- El ascensor debe pasar por su autoprueba. Todos los botones de llamada deben iluminarse en secuencia, luego los cinco botones del elevador, luego la pantalla de siete segmentos debe alternar, luego la matriz debe mostrar flechas hacia arriba y hacia abajo. Una vez completada, la pantalla de 7 segmentos mostrará el último número de piso conocido de la cabina del ascensor.
Prueba / Calibración
Debido a que el motor paso a paso necesita saber exactamente dónde detenerse en cada piso, debe indicarlo manualmente, una vez. Recordará esto en la memoria no volátil (lo que significa que lo guardará incluso cuando se desconecte la energía).
Para calibrar:
- Mantenga presionados los botones superior e inferior en el panel derecho. La matriz debe mostrar una C (para calibrar).
- Use esos botones superior e inferior para mover manualmente el automóvil al piso que se muestra en el segmento siete. Cuando esté en el lugar correcto, presione el botón central.
- Repita el paso 2 para los cinco pisos. Cuando haya terminado, la matriz debería apagarse.
Pasos siguientes
¡Proyectos como este nunca se terminan realmente! Nos gustaría reconstruir la estructura del ascensor y el hueco con piezas cortadas con láser. Usamos una sierra de calar de mano para hacer esto, por lo que nuestros cortes no son tan rectos ... eso es en parte lo que está causando nuestro "problema de fricción". Al mismo tiempo, diseñaríamos un mejor soporte de motor y obtendríamos un motor mejor y más rápido.
Electrónicamente, hemos recibido una solicitud para agregar un timbre o timbre cada vez que se abre la puerta del ascensor, como hacen muchos ascensores reales. Nosotros también lo haremos.
Cualquier pensamiento o sugerencia sobre este proyecto, ¡háganoslo saber en los comentarios!
Historial de versiones
Nota:el enlace de Google Drive se actualizará automáticamente con cada versión.
Versión 2:Arreglamos el error por el cual llamar al ascensor desde el exterior en el piso actual puede hacer que el software se cuelgue, requiriendo que presione el botón de reinicio.
Código
Biblioteca de matrices LED Arduino
https://github.com/shaai/Arduino_LED_matrix_sketchhttps://github.com/shaai/Arduino_LED_matrix_sketchBiblioteca SevenSeg
https://github.com/sigvaldm/SevenSeghttps://github.com/sigvaldm/SevenSegArduino Sketch
Proceso de manufactura