


Base de control de cámara FPV de doble eje con módulo de joystick
Componentes y suministros
 |
| × | 1 | |||
| |
| × | 2 |
Acerca de este proyecto
Hola a todos,
Hoy veremos el tutorial completo sobre cómo controlar la base de la cámara FPV de 2 ejes con módulo de joystick, la base de la cámara viene en un pequeño paquete que contiene algunos soportes y piezas acrílicos, algunos tornillos y dos servomotores.
Requisito:antes de continuar, si no está familiarizado con el joystick ni con los servomotores, aquí tiene dos tutoriales para usted:
- Cómo simplemente conectar el módulo Joystick con la placa Arduino
- Utilice servomotores con Arduino
Así que aquí usaremos dos métodos para controlar los servos:el primero donde los servos siguen la posición del joystick y se mueven mientras nosotros movemos nuestro stick, el segundo donde los servos comienzan a moverse hacia la dirección donde apunta el joystick y permanecen allí hasta que volvemos a mover la palanca o cambiamos de dirección.
Esta es una demostración de lo que tendremos al final:
En el video tutorial fui paso a paso mientras cableaba o calibraba también paso a paso mientras codificaba, pero aquí te daré todo el cableado, lo cual no es un problema porque ningún módulo o servo está afectando a los demás.
Para no confundirse con el eje del joystick, mi joystick tiene (eje X en la parte superior y luego eje Y) aquí en la imagen, están invertidos y se nombran de otra manera, pero dejo que el cableado como lo use puede cambiarlo como desee (pines de servo, joystick entradas, direcciones ...)
Así que no los confunda porque en realidad he usado muchos códigos en el video, pero son muy básicos (posicionamiento del servo, lectura del valor analógico desde el joystick ...) Hice esto antes de que pueda consultar mis otros tutoriales, así que aquí Solo subí los dos códigos para las dos versiones finales como se ve en el video.
Si necesita algo sobre esto, puede contactarme.
Código
- Código 1 como en el video
- Código 2 como en el video
Código 1 como en el video Arduino
// Este código es para usar con el soporte de cámara fpv de doble eje que usa dos servos, agregando un módulo de joystick // controlamos la posición del soporte moviendo el joystick analógico, el soporte sigue los movimientos del joystick // Consulte surtrtech.com para más información # incluya// Biblioteca de servos y declaraciónServo myservo1; Servo myservo2; int YAxis =1; // Declarando dónde están conectados el eje X y el eje Y de los pines del joystickint XAxis =0; // Por supuesto, entradas analógicasvoid setup () {Serial.begin (9600); // Configurando la velocidad de transmisión del monitor serial y lanzando pinMode (XAxis, INPUT); // Declarando los modos de pin y los pines de servo myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach (9);} bucle vacío () {int X =analogRead (XAxis); // Lectura del potenciómetro del eje X X =X * 0.1756; // Convirtiendo el rango del potenciómetro de 0-1023 a 0-180 límites del servo, puede cambiarlos si tiene un servos de 360 ° X =180-X; // Esto se usa para que el servo gire a la posición exacta de lo contrario estará invertido myservo1.write (X); // Después de adaptar inyectamos ese valor al primer servo int Y =analogRead (YAxis); // Lectura del potenciómetro del eje Y Y =Y * 0.1466; // Aquí hicimos una conversión que se adapta a los límites del servo así que pasamos de 0-1023 a 0-150 myservo2.write (Y); // E inyectamos a nuestro servo}
Código 2 como en el video Arduino
// Este código es para usar con la cuna de cámara fpv de doble eje que usa dos servos, agregando un módulo de joystick // Controlamos la posición de la cuna moviendo la palanca analógica, la cuna se mueve en la dirección donde está la palanca apuntando // hasta los límites y permanezca allí // Consulte surtrtech.com para obtener más información # incluir// Biblioteca de servos y declaraciónServo myservo1; Servo myservo2; int a, b, X, Y; // Variables necesarias laterint YAxis =1; // Declarando dónde están conectados el eje X y el eje Y de los pines del joystickint XAxis =0; // Por supuesto, entradas analógicasvoid setup () {Serial.begin (9600); // Configurando la velocidad de transmisión del monitor serial y lanzando pinMode (XAxis, INPUT); // Declarando los modos de pin y los pines de servo myservo1.attach (8); pinMode (YAxis, INPUT); myservo2.attach (9);} bucle vacío () {a =myservo1.read (); // Leer las posiciones de los servos anteriores es un paso importante para que sepamos dónde deben posicionarse a continuación b =myservo2.read (); X =analogRead (XAxis); // Lectura de los valores del joystick Y =analogRead (YAxis); if (X> 550) {// Aquí no hicimos ninguna calibración por lo que el joystick tiene tres posiciones (Izquierda | Descansando | Derecha) a =a-1; // Depende del valor que leamos, podemos saber en qué dirección apunta la palanca y dejé la posición de reposo grande, en realidad es solo 1 valor myservo1.write (a); // inyectamos el nuevo valor delay (50); // Puede hacer que el retraso sea grande o corto o actuar sobre a =a-x para dar pasos grandes o cortos} if (X <450) {a =a + 1; // Aquí hicimos la operación opuesta para movernos en la dirección opuesta myservo1.write (a); retraso (50); } if (Y> 600) {// Aquí no hicimos ninguna calibración por lo que el joystick tiene tres posiciones (Arriba | Descanso | Abajo) ídem b =b + 1; myservo2.write (b); retraso (50); } si (Y <450) {b =b-1; myservo2.write (b); retraso (50); }
Esquemas
Hay un servo superior y un servo inferior, no los confunda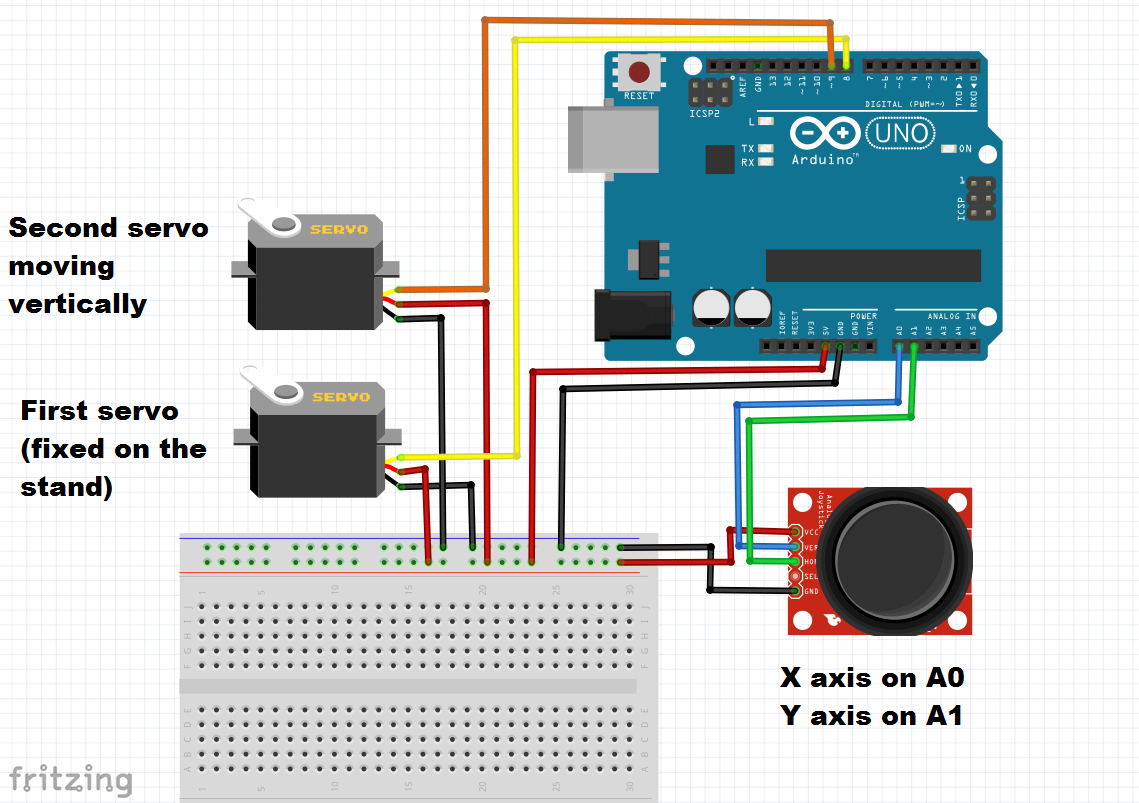
Proceso de manufactura
- Control de acceso con QR, RFID y verificación de temperatura
- Frambuesa con cámara en pajarera
- Cámara de seguridad Discord con ESP32
- Robot desinfectante con luces ultravioleta
- Controlar el aceptador de monedas con Arduino
- Control remoto de TV a batería con carcasa impresa en 3D
- Obstáculos que evitan el robot con servomotor
- ¡Arduino con Bluetooth para controlar un LED!
- Arduino Nano:Controla 2 motores paso a paso con joystick
- Torno con CNC
- Control de funciones de torno de bancada inclinada con gráficos de verificación