


360 Radar (que codifica datos en una imagen)
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
| ||||
 |
|
Aplicaciones y servicios en línea
 |
| |||
| |
|
Acerca de este proyecto
Estoy aquí y les mostraré cómo hacer un radar 360. Envíe los datos a la computadora, y luego de procesarlos dibuje el Radar en tiempo real y luego de una revolución (giro de 360 grados) guarde el Radar anterior y dibuje el nuevo. y después de todos estos CODIFICAR los datos y esconderlos en una imagen. Por ejemplo, si envía solo los datos codificados y alguien observó esta transferencia de datos, descubrirá que transfirió un dato CODIFICADO . Pero, si ocultas los datos codificados en una imagen, él nunca descubrirá lo que hiciste y pensará que enviaste una foto para otra persona.
Paso 1 (recopile lo que necesita)
En este proyecto necesitará:
- Arduino (usé Uno R3)
- Servomotor (necesitamos 2 de ellos porque deberíamos tener 360 ° de movimiento disponibles)
- Sensor ultrasónico (usamos este para calcular la distancia)
- Cables para que pueda conectar el sensor ultrasónico y el servo.
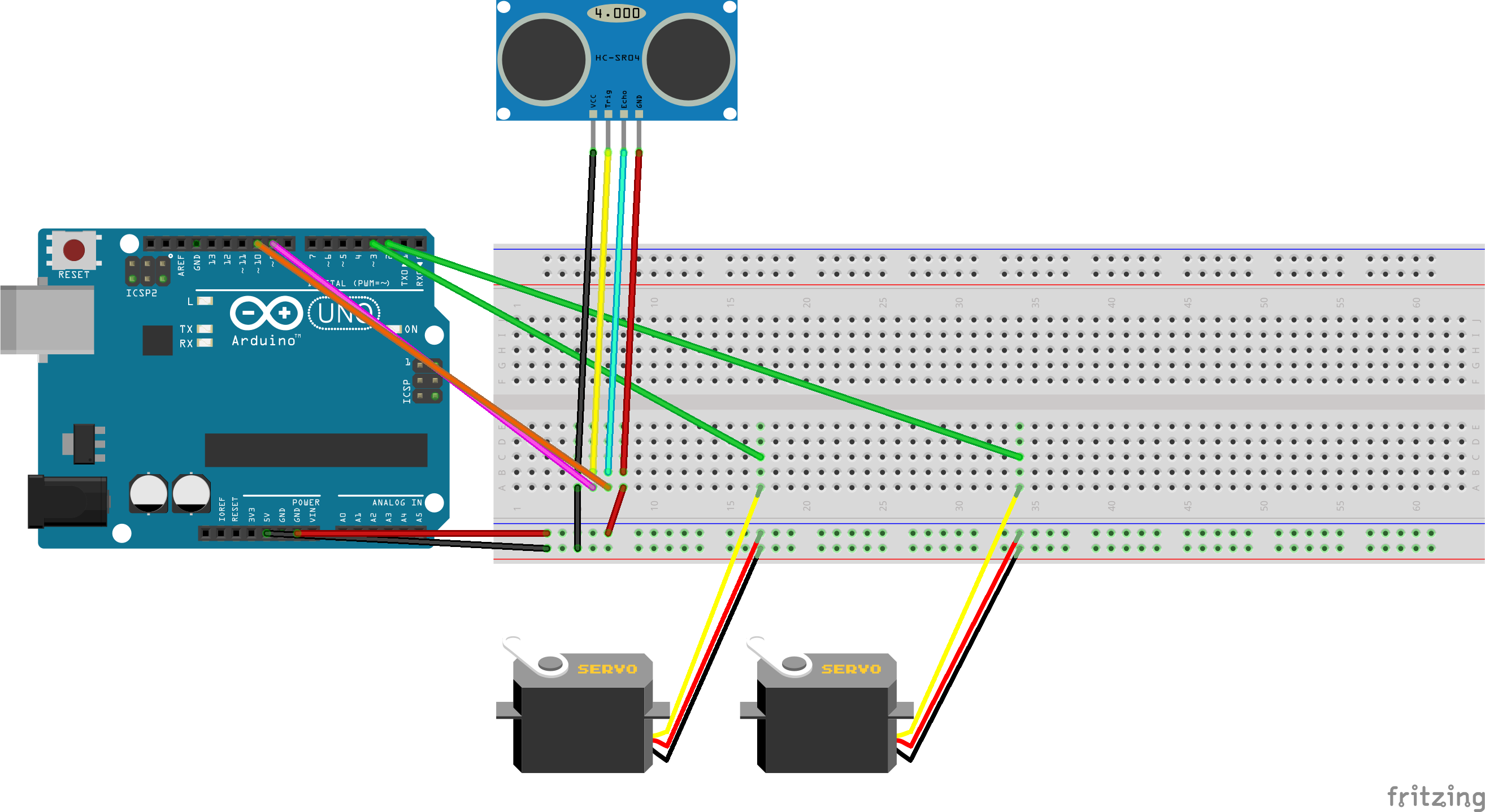
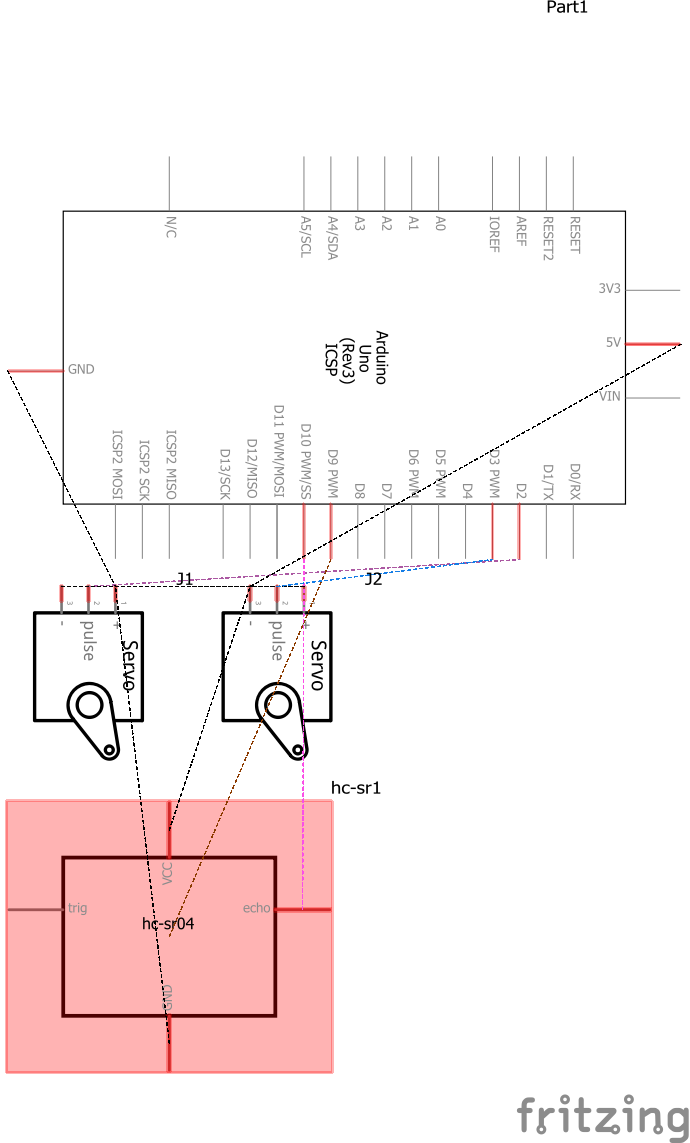
Paso 2 (móntelos)
Conecte el servo y el sensor ultrasónico al Arduino como en el esquema a continuación (justo encima del código C ++). Puede cargar el código y verlos en la computadora.
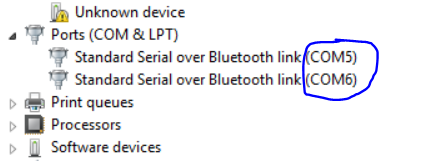
Atención:si no sabe cuál es el nombre del puerto, vaya al Administrador de dispositivos y luego busque Puertos. puede ver el nombre allí (COM3 o COM5).
Si terminas el proyecto, solo pídeme que te envíe el archivo EXE de Radar Drawer.
* Actualización *:descargue el archivo EXE en esta página.
Si tiene problemas para trabajar con EXE o si desea crear su propio EXE, simplemente pregúnteme y estoy aquí para ayudarlo.
Cuando importe una foto para codificar la IA, elija el mejor método para hacerla más nítida.
Código
- Control de servo
Servocontrol C / C ++
Este código en C ++ es para controlar el servo y debe cargarse en Arduino#includeServo Down; Servo Up; const int trigPin =9; const int echoPin =10; long duration; int pos =0; int pos2 =0; int distancia; int _degrees; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT); Down.attach (2); Up.attach (3); Serial.begin (9600); } bucle vacío () {Down.write (0); Up.write (0); para (pos =0; pos <=180; pos + =1) {Down.write (pos); _ grados =pos; dis (); retraso (50); if (pos ==180) {for (pos2 =0; pos2 <=180; pos2 + =1) {Up.write (pos2); _ grados =pos + pos2; dis (); retraso (50); }}} para (pos =180; pos> =0; pos - =1) {Down.write (pos); Up.write (pos); retraso (5); }} void dis () {digitalWrite (trigPin, LOW); delayMicroseconds (2); digitalWrite (trigPin, HIGH); delayMicroseconds (10); digitalWrite (trigPin, LOW); duration =pulseIn (echoPin, HIGH); distancia =duración * 0.034 / 2; Serial.print (distancia); Serial.print (","); Serial.println (_degrees); }
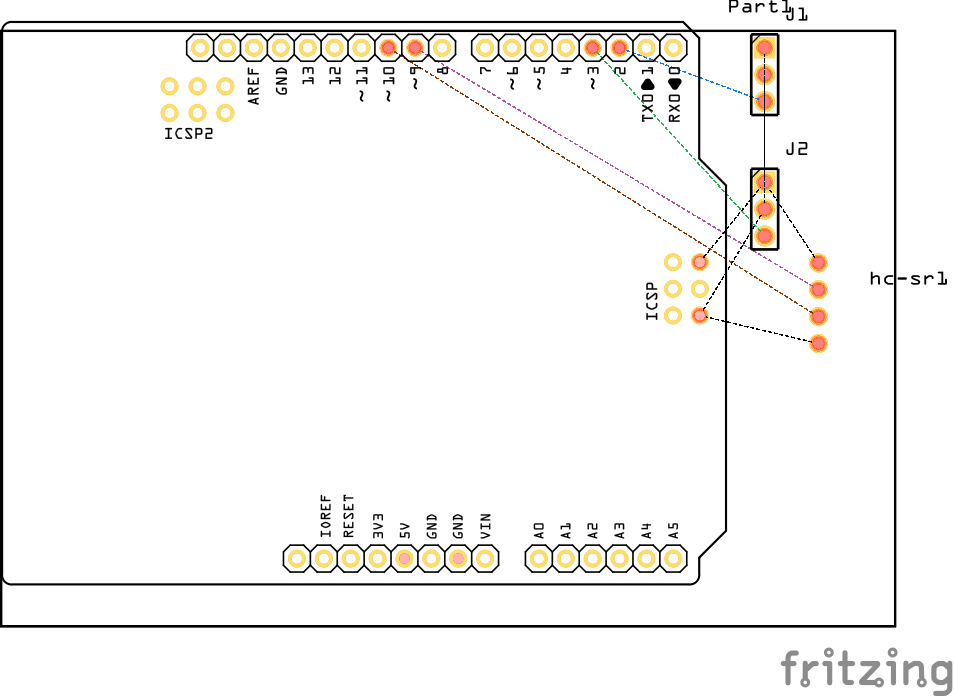
Piezas y carcasas personalizadas
Descargue el archivo EXE desde aquí circular_draw_qP2ROsoPds.rarEsquemas
Proceso de manufactura
- Transferencia de datos magnética inalámbrica
- Dados digitales Arduino
- Registrador de datos de temperatura y humedad
- Iron Man
- Encuéntrame
- Brazo robótico Arduino impreso en 3D
- Control del humidificador Arduino
- NeoMatrix Arduino Pong
- Joystick de Arduino
- Receptor de radio FM Arduino TEA5767
- Podómetro (Arduino 101)