


Arduino / Android - Control de motor servo múltiple BLUETOOTH
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Acerca de este proyecto

¡Hola Mundo! Ayer hice una aplicación de control de servo 1 y dije que haría un control múltiple, ¡así que aquí está la aplicación de control múltiple! También hice un mejor código Arduino. Siga el siguiente paso para el esquema, el código, la lista de piezas y la aplicación.
Obtén la aplicación en: GOOGLE PLAY
¡Contáctame si quieres el código fuente!
Paso 1:lista de piezas
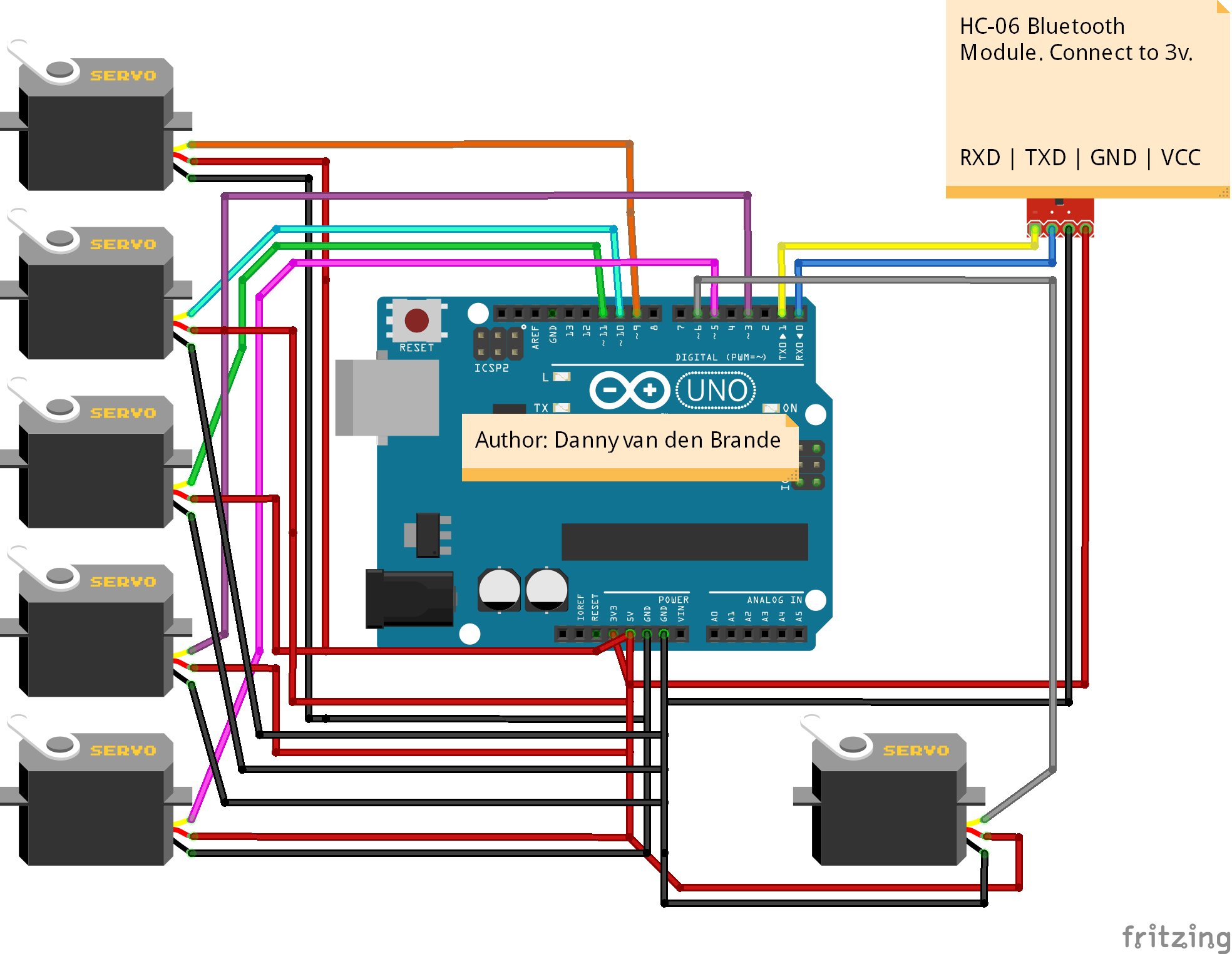
Conecte todo como en el esquema, cargue el código, descargue la aplicación, conecte Bluetooth después de emparejar los dispositivos y debería funcionar. Asegúrese de conectar RXD a TX y TXD a RX.
También asegúrese de NO conectar el módulo Bluetooth al realizar la carga.
Lista de piezas:
- Arduino Uno, ( ¡Usa un Mega si quieres usar más de 6 Servos!) Usé el RobotDyn Uno.
- Módulo Bluetooth HC-06, o cualquier otro.
- 6 x servomotor. ( Puede probar con uno, por supuesto )
- Juego de cables de puente MM / FF / MF
- teléfono Android.
¡Buena suerte!
Siga el siguiente paso para averiguar cómo cambiar el nombre, el pin y la velocidad en baudios de su módulo Bluetooth. ( opcional )
Paso 2:Cómo cambiar el nombre de su HC-06
¿Qué se necesita?
- 1 x programador de microcontrolador USB a TTL para conectarlo a su HC-06
¿Cómo conectar el programador?
- VCC a VCC
- GND a GND
- RXD a TX
- TXD a RX
Empecemos:
- Conecte el programador TTL USB al HC-06.
- Conecte el USB y abra el IDE de Arduino.
- Abra el monitor de serie.
- Escriba "AT" sin comillas. Debería ver una respuesta en el monitor de serie que diga "OK".
- Escriba "AT + NAMExyz". Establece el nombre del módulo en "xyz" (reemplace xyz con el nombre que desee). La respuesta debe ser OKsetname.
- Escriba "AT + PIN1234". Establece el pin en 1234 (reemplace 1234 con el pin que desee). La respuesta debe ser OKsetPIN. Para obtener más información sobre cómo cambiar la velocidad en baudios, etc., incluí un archivo PDF. ¡Buena suerte!
Código
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.ino Arduino
Código para controlar múltiples servos./ * Autor:Danny van den Brande. Con este código puedes controlar múltiples servomotores usando una aplicación para Android. Puedes agregar tantos como quieras hasta que se te acaben los pines. Puedes agregar más Servos en el código. Si quieres la fuente de la aplicación, contáctame. * / # incluyenServo myservo1, myservo2, myservo3, myservo4, myservo5, myservo6, myservo7, myservo8, myservo9, myservo10; byte serialA; void setup () {myservo1.attach (9); myservo2.attach (10); myservo3.attach (11); myservo4.attach (3); myservo5.attach (5); myservo6.attach (6); // myservo7.attach (); complete los números de pin si usa más de 6 servos los dejé en blanco // myservo8.attach (); // myservo9.attach (); // myservo10.attach (); Serial.begin (9600); // cambie su velocidad en baudios a la velocidad en baudios de sus módulos Bluetooth si es necesario.} Void loop () {if (Serial.available ()> 2) {serialA =Serial.read (); Serial.println (serialA );} {unsigned int servopos =Serial.read (); unsigned int servopos1 =Serial.read (); unsigned int realservo =(servopos1 * 256) + servopos; Serial.println (realservo); if (realservo> =1000 &&realservo <1180) {int servo1 =realservo; servo1 =mapa (servo1, 1000,1180,0,180); myservo1.write (servo1); Serial.println ("servo 1 ON"); retraso (10); } if (realservo> =2000 &&realservo <2180) {int servo2 =realservo; servo2 =mapa (servo2,2000,2180,0,180); myservo2.write (servo2); Serial.println ("servo 2 activado"); retraso (10); } if (realservo> =3000 &&realservo <3180) {int servo3 =realservo; servo3 =mapa (servo3, 3000, 3180,0,180); myservo3.write (servo3); Serial.println ("servo 3 activado"); retraso (10); } if (realservo> =4000 &&realservo <4180) {int servo4 =realservo; servo4 =mapa (servo4, 4000, 4180,0,180); myservo4.write (servo4); Serial.println ("servo 4 activado"); retraso (10); } if (realservo> =5000 &&realservo <5180) {int servo5 =realservo; servo5 =mapa (servo5, 5000, 5180,0,180); myservo5.write (servo5); Serial.println ("servo 5 activado"); retraso (10); } if (realservo> =6000 &&realservo <6180) {int servo6 =realservo; servo6 =mapa (servo6, 6000, 6180,0,180); myservo6.write (servo6); Serial.println ("servo 6 activado"); retraso (10); } // if (realservo> =7000 &&realservo <7180) {// UNCOMMENT si usa más de 6 Servos.// int servo7 =realservo; // servo7 =map (servo7, 7000, 7180,0,180); // myservo7 .write (servo7); // Serial.println ("servo 7 On"); // delay (10); //} //// if (realservo> =8000 &&realservo <8180) {// int servo8 =realservo; // servo8 =map (servo8, 8000, 8180,0,180); // myservo8.write (servo8); // Serial.println ("servo 8 On"); // delay (10); //} / /// if (realservo> =9000 &&realservo <9180) {// int servo8 =realservo; // servo8 =map (servo9, 9000, 9180,0,180); // myservo8.write (servo8); // Serial. println ("servo 9 activado"); // delay (10); //} //// if (realservo> =10000 &&realservo <10180) {// int servo10 =realservo; // servo10 =map (servo10, 10000, 10180,0,180); // myservo10.write (servo10); // Serial.println ("servo 10 On"); // delay (10); //}}}
Esquemas
Proceso de manufactura
- Robot Pi simple
- Control remoto universal usando Arduino, 1Sheeld y Android
- Centro de control de Arduino
- Juguete controlado por Android con Raspberry Motor Shield
- Obstáculos que evitan el robot con servomotor
- ¡Arduino con Bluetooth para controlar un LED!
- Control del humidificador Arduino
- Control del servomotor con Arduino y MPU6050
- Control de coche con Arduino Uno y Bluetooth
- ¿Qué es un servomotor?
- ¿Qué es el servomotor reductor?