


¡Catapulta automática para lanzar comida para mascotas, pelotas y más!
Componentes y suministros
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
¡Hola y bienvenido a mi primer proyecto!
A nuestro perro le ENCANTA su comida, literalmente se la comerá toda en segundos. He estado ideando formas de frenar esto, desde pelotas con la comida adentro hasta tirarla por todo el patio trasero. Sorprendentemente, ahora es como una aspiradora y puede encontrar y comer la comida increíblemente rápido. Entonces, volviendo a la mesa de dibujo, se me ocurrió este dispositivo para ayudarla a reducir la velocidad y disfrutar de su comida :)
CONCEPTO

Tómese unos segundos para disfrutar de los 2 videos, explican mucho.
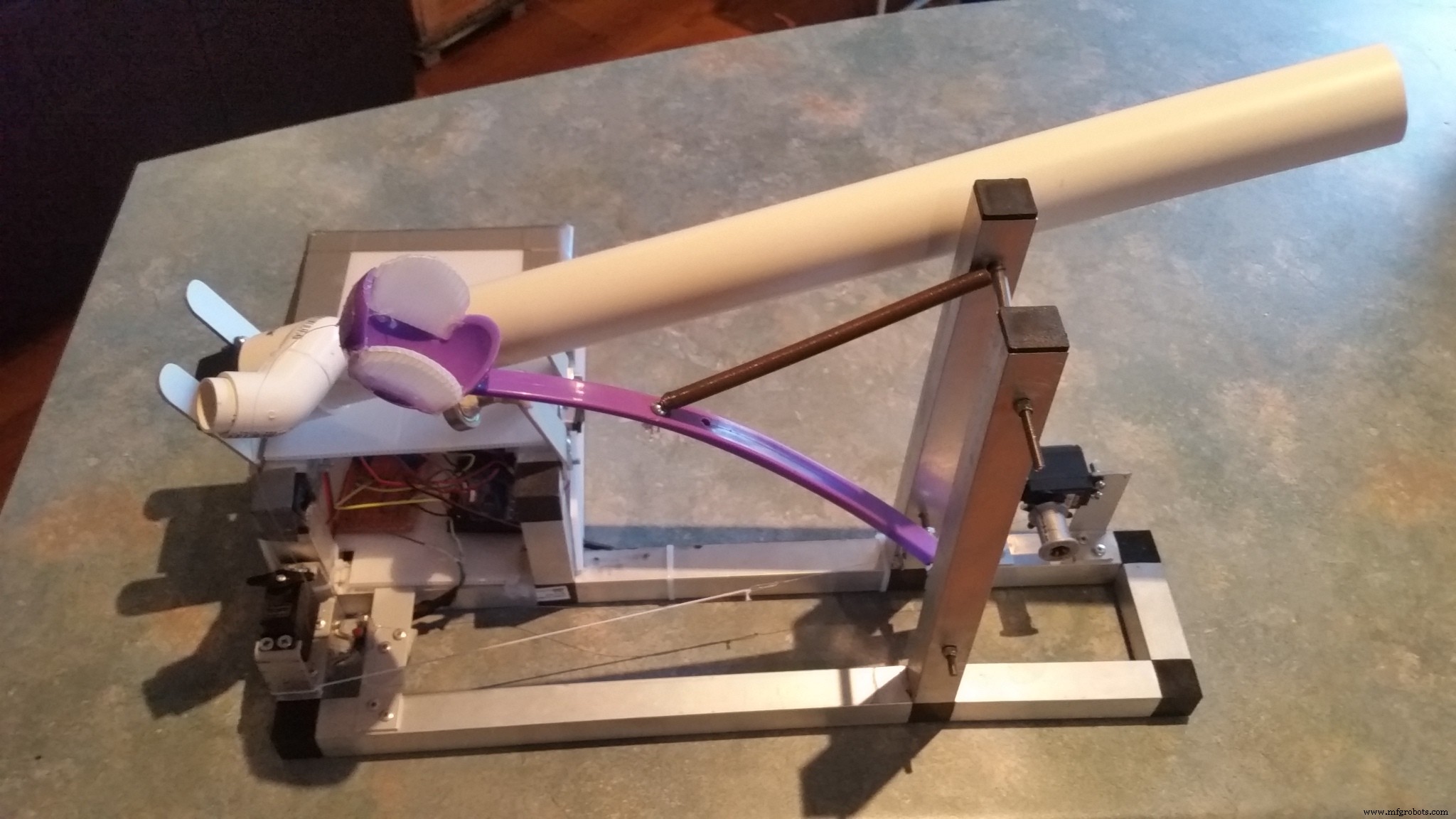
Pero, en palabras, el concepto básico es que el servo Rotator gira y tira del brazo de la catapulta hacia abajo. Hace esto hasta que toca el interruptor de límite. Luego, el servo del gatillo pasa a la posición de retención, que mantiene presionado el brazo de la catapulta. El servo Rotator luego se rebobina a la posición original, listo para el próximo lanzamiento.
El servo de entrega de alimentos gira la tubería y entrega algo de comida (u otras cosas) al contenedor / cabezal del brazo de la catapulta. El servo del gatillo gira y deja que el resorte tire hacia atrás del brazo de la catapulta y arroje la comida.
En las pruebas, esta configuración y catapultó galletas de comida para perros de más de 10 metros, con comida rodante. Los ajustes a los servos y el cambio de resorte modificarán esto por completo.
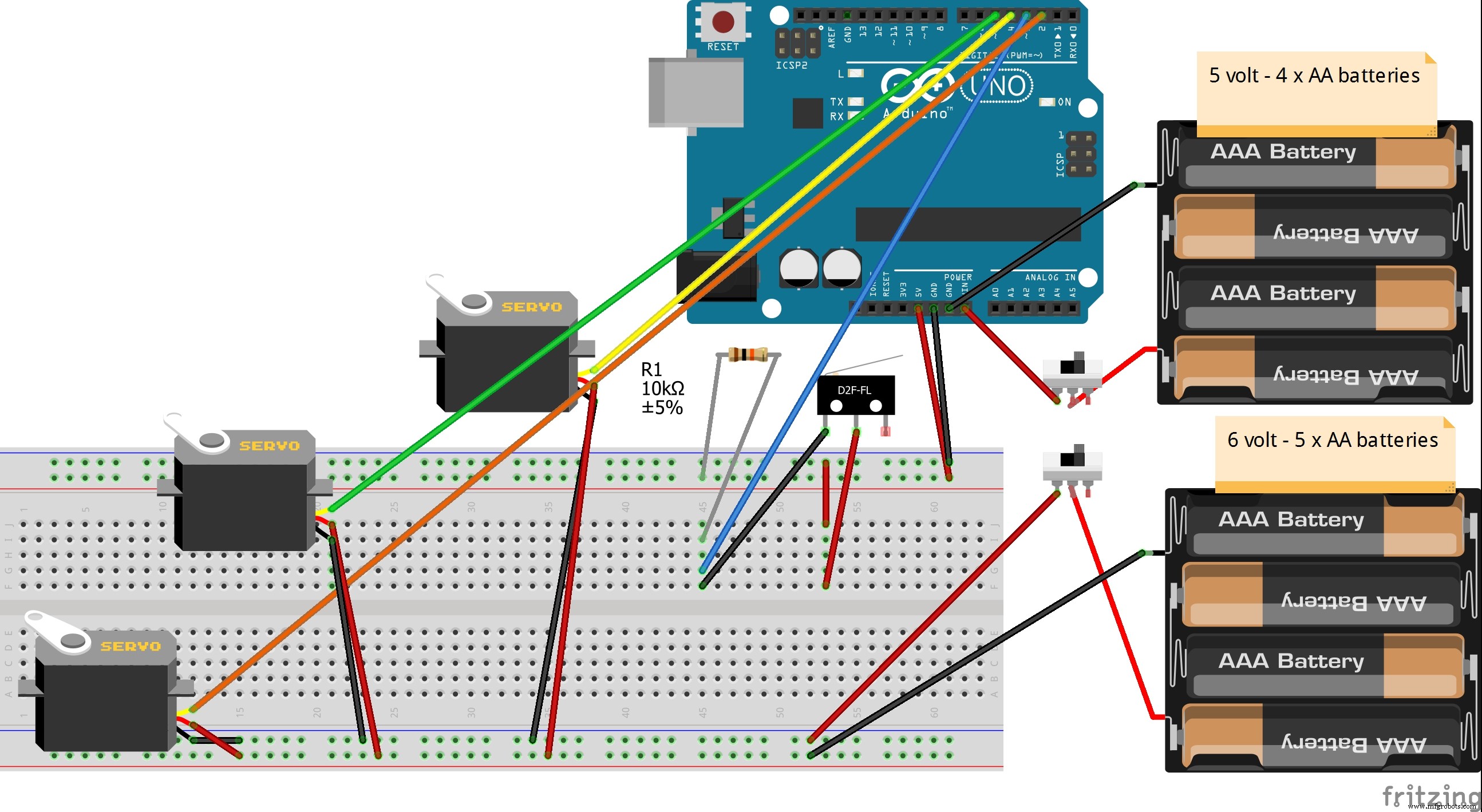
ELECTRÓNICA
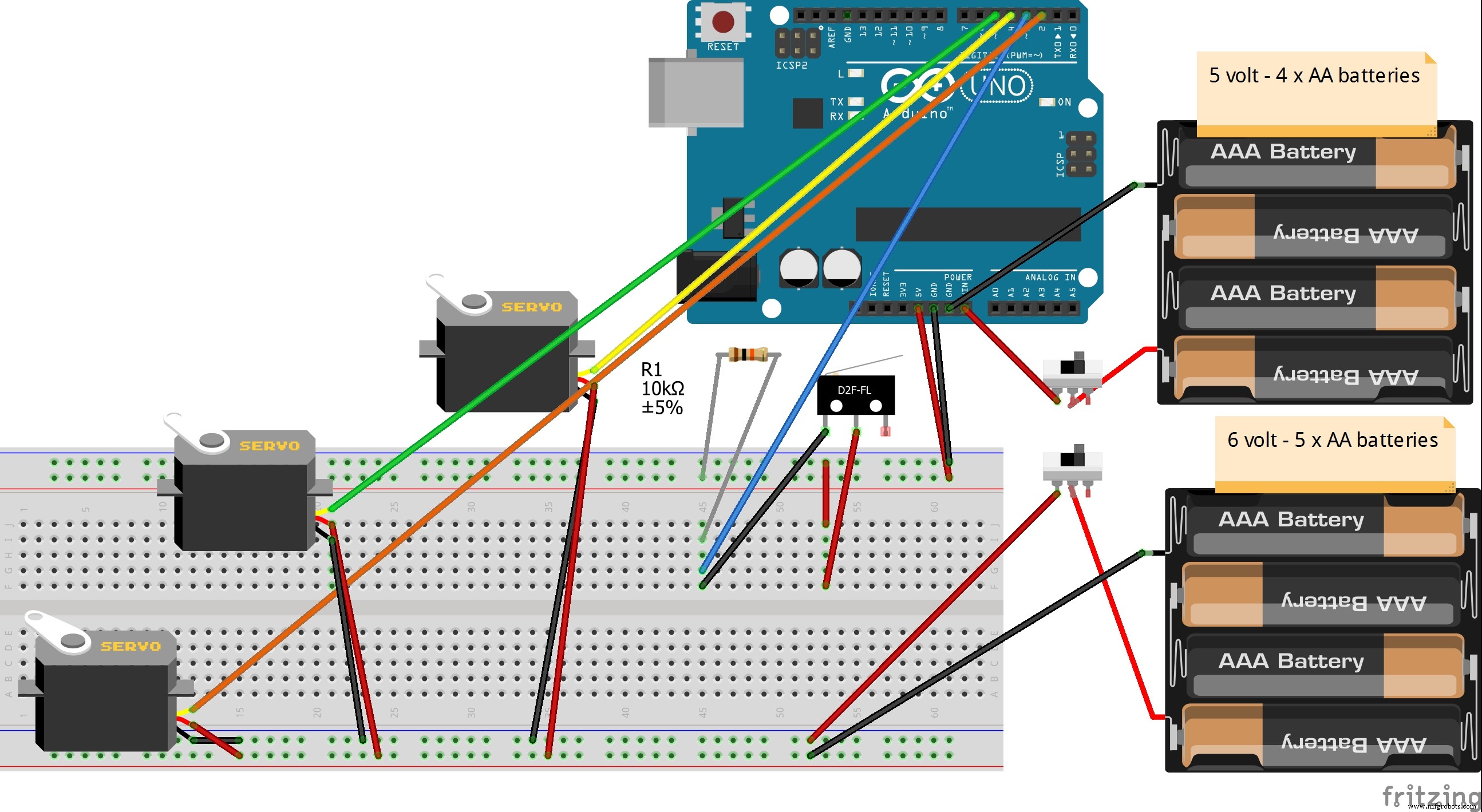
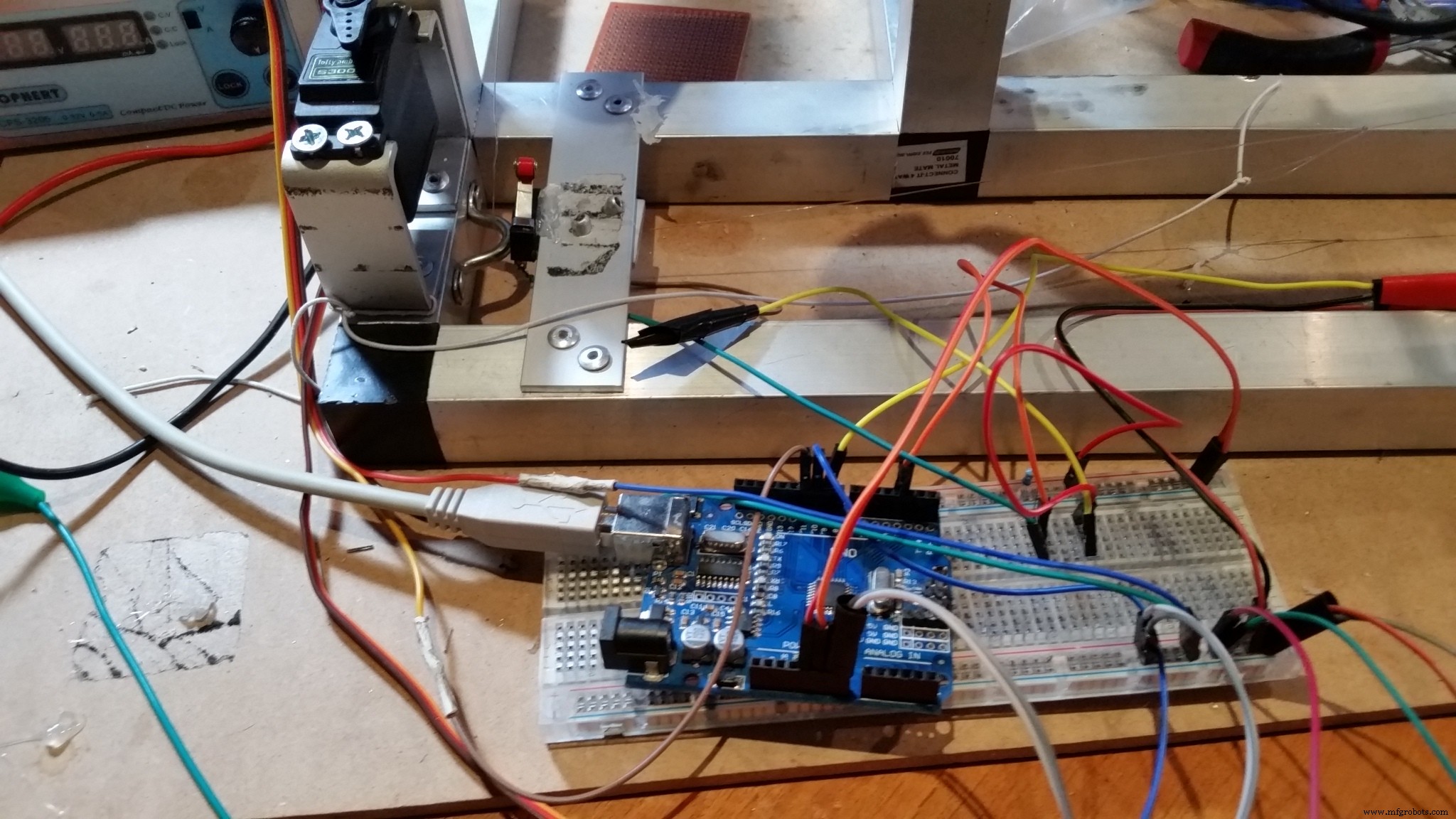
Intentaré ser conciso a lo largo de este proyecto, no solo por simplicidad, sino porque esta catapulta se puede hacer de 100 formas diferentes. Se puede escalar y puedes hacer varias estructuras y usar varios materiales. Además de la electrónica y los servos, el resto es completamente flexible con lo que tienes a mano o con tu presupuesto.
No explicaré paso a paso cómo hacer la electrónica, hay muchos proyectos impresionantes sobre eso. Especialmente porque soy un novato, probablemente he cometido errores y sería mejor que aprendiera de los profesionales;)
MATERIALES
- Arduino Uno R3 - aunque cualquier Arduino hará el trabajo
- 2 x servos de 180 grados
- 1 x servo de rotación continua
- Interruptor de límite
- Resistencia de 10 k ohmios
- 4 pilas AA y estuche
- 1 pila de linterna de 6 voltios - se puede (y lo haré) reemplazar con 5 pilas AA conectadas juntas
- 2 interruptores:cualquier tipo servirá, incluso el más simple
- Cables de conexión, muchos de estos;)
- Placa de pruebas:para pruebas
MATERIALES - SI SE CREAN PERMANENTES
Conectores de 2 pines de 2 x 2 pines de la placa de perforación:opcional, puede cablear los gabinetes de la batería.
SERVOS
Compré un par de servos de 180 grados Lofty Ambition S3003 baratos en eBay. Querrá algo de al menos este gruñido, no intente comprar menos, ya que no podrán tomar la carga. Pero tampoco es necesario que sean costosos de Jaycar (tienda de electrónica australiana) o similares. El servo de rotación continua que utilicé es FS5106R. El modelo no es importante, pero definitivamente necesitará que el servo tenga al menos estas especificaciones.
Si hace que la catapulta sea más fuerte o más grande, asegúrese de obtener servos más grandes para que coincidan.
ESTRUCTURA

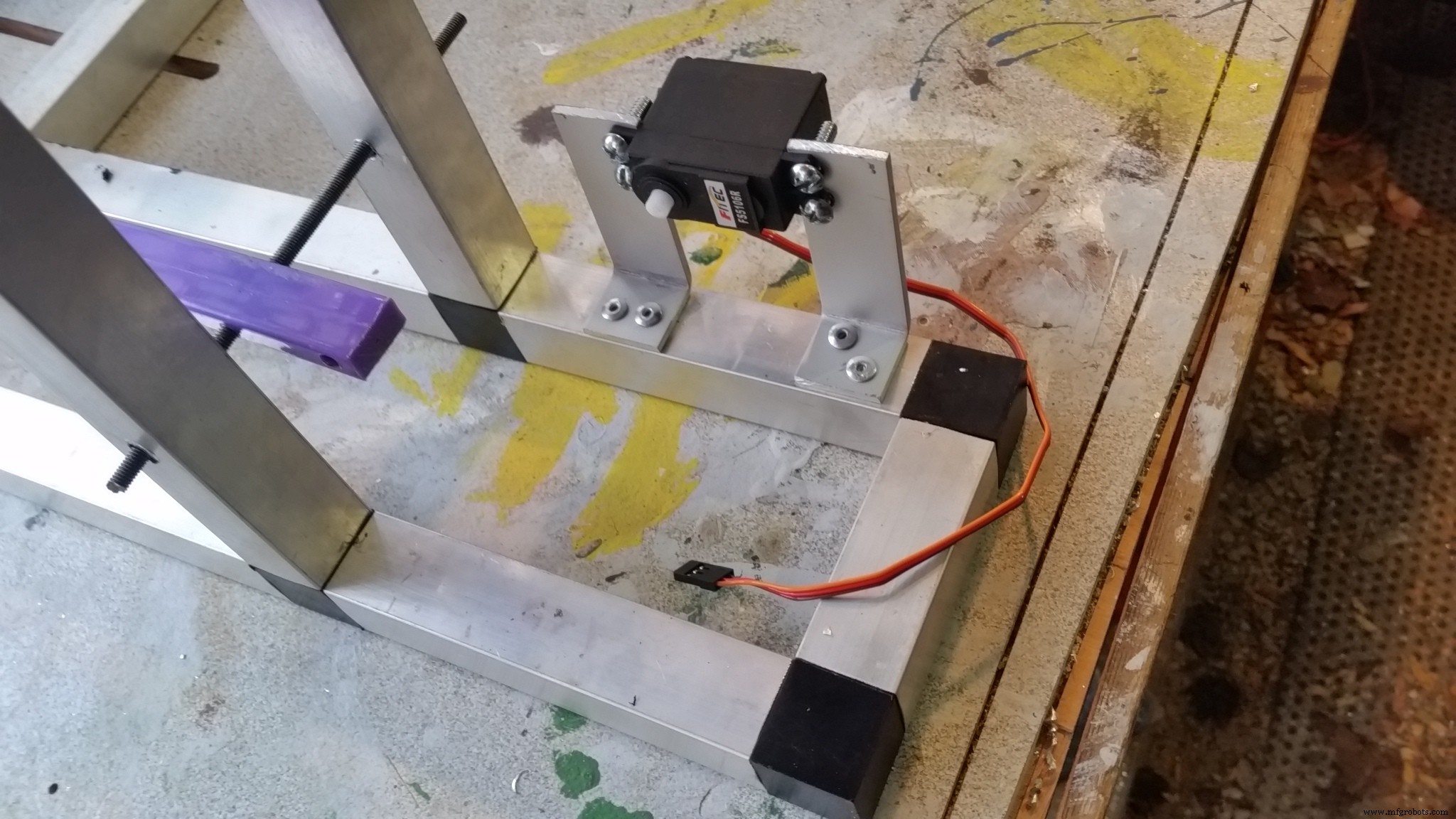


Como se indicó anteriormente, la estructura depende completamente de usted. Puedes hacerlo de plástico, madera o metal. El tamaño también depende de ti. Si quieres poder catapultar más comida (u otras cosas) hazla más pequeña o más grande. Entonces, debido a estos puntos, no entraré en detalles completos sobre cómo hice mi estructura. Estoy muy feliz de poder dar respuestas sobre cualquier tema.
Soy un GRAN fanático de la reutilización / reciclaje / reciclaje / etc. Mucho de lo que he usado lo tenía en mi cobertizo. Hice la mayor parte de mi estructura con aluminio que tenía debido a otro proyecto. La estructura principal está hecha de tubos de aluminio cuadrados de 25 mm y conectores de plástico "connect-it". Los soportes para los motores los hice de aluminio de 25 mm de ancho x 3 mm.
El concepto de entrega de comida fue de este proyecto:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 por https://www.hackster.io/circuito-io-team - ¡muchas gracias a ellos!
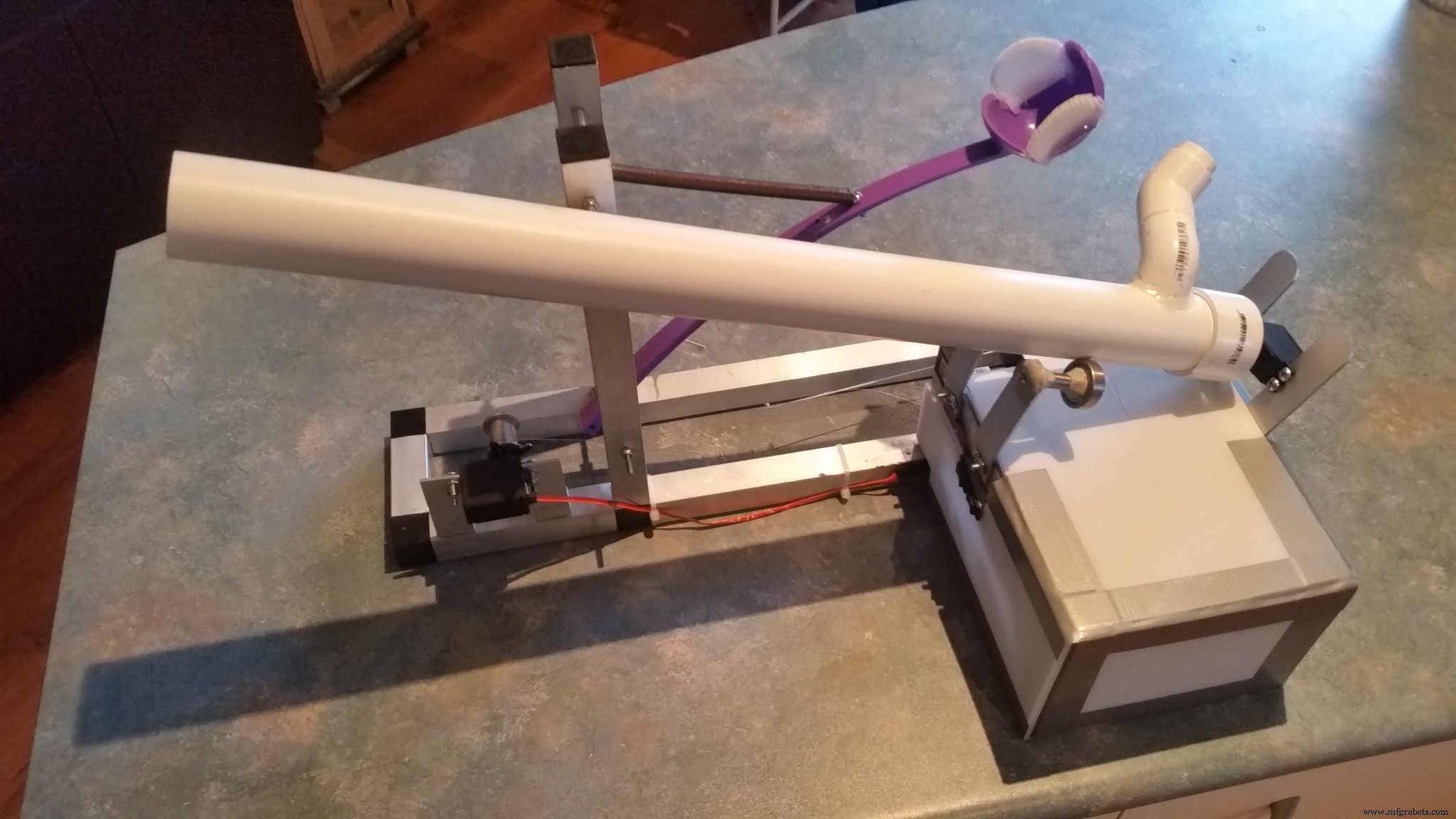
El soporte que hice es de tubería de PVC de 40 mm de mi ferretería local. El brazo real son dos conectores más pequeños de 45 grados, conectados entre sí y pegados en caliente en la tubería más grande. El tubo de PVC más grande tiene otro conector de 45 grados para que sea más fácil agregar las galletas de comida para mascotas (u otras cosas). Todo hecho para poder ser desmontado, para cualquier modificación.
El resto del brazo de entrega de alimentos fue diseñado para permitir un movimiento circular fácil, para facilitar el servo. Hay mejores formas (si tienes las herramientas) de hacer esto, pero hice lo mejor que pude. Hice unos soportes, corté un poco de varilla de metal y usé un producto llamado "amasarlo" para unir las varillas a los soportes y los cojinetes. Como puede ver en los videos, la tubería de PVC gira suavemente sobre los cojinetes y estos quitan gran parte del peso (y el torque requerido) del servo.
El brazo de la catapulta es un lanzador de pelotas de tenis de una tienda barata a $ 2.
El poder de catapultar proviene de un viejo resorte que encontré en mi taller, como se puede ver en el óxido. El tamaño, el tipo y la fuerza del resorte son cruciales para determinar qué tan fuerte y efectiva funciona la catapulta. Tendrá que equilibrar la fuerza del servo, la fuerza del resorte y la flexibilidad del brazo de la catapulta. Obtener este equilibrio es complicado y realmente depende de lo que esté buscando. He optado por un diseño que deja movimiento en el brazo, lo que crea cierta imprevisibilidad en el destino de la comida. El recinto superior del brazo de la catapulta, que contiene las galletas, también ayuda con la imprevisibilidad. Más divertido para la mascota encontrar la comida.
El brazo de la catapulta se tira hacia abajo a través de un hilo de pescar a través de un pequeño mango de metal (o alimentador, depende de su uso), debajo de una plataforma que sostiene el interruptor de límite (más sobre eso en segundo), a lo largo de la estructura, a través de otro mango de metal (para evitar que se enrede), luego se adjunta al eje (utilicé la cosa de plástico que sostiene el algodón para el eje en el rotor), que se adjunta al servo continuo. Además, utilicé un poco de elástico delgado y débil, unido al hilo de pescar y los soportes del gatillo. Esto asegura que cuando el Rotator se desenrolle, el hilo de pescar no quede atrapado en ninguna parte.
Usé este Tunnel Core - Lámina de plástico para todo uso - Tablero de servicios públicos de doble pared para una manera fácil de crear el recinto para las baterías y los componentes electrónicos.
La estructura es muy sólida, pero bastante ligera. La parte más pesada es la batería de la linterna, que se reemplazará en breve con baterías recargables AA.
LECCIONES APRENDIDAS Y MODIFICACIONES FUTURAS
Al igual que con cualquier cosa en la que no seas un maestro, siempre hay cosas que se aprenden en el camino. En este proyecto, bueno, digamos que te aburrirías con mi lista antes de llegar al final;)
Uno de los mayores problemas es la obstrucción de alimentos. Este brazo de entrega de alimentos proviene de un proyecto, pero desafortunadamente parece que no puedo encontrarlo. Esporádicamente no entrega galletas, pero esto es bueno, ¡mantiene a la mascota adivinando! Pero, en general, funciona muy bien.
Construí la estructura de aluminio porque nuestro perro no es gentil, por lo que necesita sostenerlo. Afortunadamente, hasta ahora está funcionando bien.
Mejoraré el brazo de la catapulta, haciéndolo lucir un poco más sexy. La mayoría de los elementos importantes se pueden desglosar para permitir el acceso. p.ej. entrega de alimentos, caja de electrónica.
En definitiva, un proyecto muy divertido y ¡a nuestro perro le encanta! Estoy muy feliz de poder brindar respuestas o consejos sobre cualquier tema.
Muchas gracias a Hackster y a ti por leer sobre la Catapulta automática.
Código
- Catapulta automática - código Arduino
Catapulta automática - código Arduino Arduino
/ * * Flinger automático de alimentos para mascotas de Nathan King Junio de 2018 * / # includeint FoodDeliveryReleasePosition =115; int FoodDeliveryHoldPosition =0; int TriggerReleasePosition =90; int TriggerHoldPosition =0; int limit_switch =3; int switch_state =0; Servicio de entrega de alimentos; // crea un objeto servo para controlar el disparador armServo de entrega de alimentos; // crea un objeto servo para controlar el rotador triggerServo; // crea un objeto servo para controlar el rotatorvoid setup () {rotater.attach (2); // adjunta el disparador del servo rotador.attach (4); // adjunta el servo del disparador fooddelivery.attach (5); // adjunta el servo de entrega de alimentos pinMode (limit_switch, INPUT); Serial.begin (9600);} bucle vacío () {rotater.write (89); // detiene el movimiento del servo Rotador - innecesario si tiene un buen servo;) delay (500); // Posiciones de inicio fooddelivery.write (FoodDeliveryHoldPosition); retraso (1000); trigger.write (TriggerHoldPosition); retraso (1000); trigger.write (TriggerReleasePosition); delay (1000); // bucle de interruptor de límite para detener el servo del rotor switch_state =digitalRead (limit_switch); Serial.println (switch_state); while (switch_state ==HIGH) {switch_state =digitalRead (limit_switch); Serial.println ("El interruptor está apagado"); rotater.write (75); // inicia Rotator en el sentido de las agujas del reloj a una velocidad xx (0-255)} Serial.println ("El interruptor está encendido"); rotater.write (89); // detiene el servo del Rotator // Sostiene el brazo de la catapulta en el gatillo y restablece el Rotator a la posición inicial trigger.write (TriggerHoldPosition); retraso (1000); rotater.write (110); retraso (4500); rotater.write (89); retraso (2000); // Entrega de comida para catapultar fooddelivery.write (FoodDeliveryReleasePosition); retraso (500); fooddelivery.write (FoodDeliveryReleasePosition); // esperar a que caiga la comida delay (1000); fooddelivery.write (FoodDeliveryHoldPosition); delay (150); // Esto es para agregar un retraso entre la entrega de comida y la liberación del gatillo rotater.write (89); retraso (1000); // ¡¡Suelta la catapulta !! trigger.write (TriggerReleasePosition); retraso (3000); // retraso para que la mascota encuentre la comida; edítelo para cambiar la rapidez con la que se entrega la comida :)}
Esquemas
Proceso de manufactura
- Comida para mascotas
- Diseño higiénico para la industria alimentaria y de procesamiento
- Controlador, consejos de selección de registrador para aplicaciones de alimentos y bebidas
- Masterbatches de color acetal para automoción y más basados en portadores de bajas emisiones
- B&R presenta una computadora de 'gama alta' para vehículos agrícolas y de construcción autónomos
- Consejos para el mecanizado CNC de titanio:aeroespacial y más
- Con cabezal deslizante automático para torneado suizo y de producción
- Consejos para aplicar lubricante para metales:evitar el exceso de grasa y más
- Invar:tendencias de almacenamiento inteligente para 2021 y más allá
- Máquinas expendedoras automáticas de alimentos:versatilidad del producto
- Saber cuándo y cómo elegir una bomba de refuerzo automática para su hogar