


Barrido de servo solo
Componentes y suministros
 |
| × | 1 | |||

| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Acerca de este proyecto
Introducción
Solo tiene un gran entorno de desarrollo pero carece de E / S. Actualmente, el puerto de accesorios rompe CAN, Mavlink Serial to Pixhawk y USB to Sololink (imx6). Mediante el uso de un arduino y firmata puede agregar sensores personalizados, controlar servos, parpadear LED o cualquier otra función arduino.
Este tutorial lo guiará a través de los pasos para usar un arduino con Solo para controlar un servo.
Preqs. de software:
- Actualización de Solo 1.2.0 o superior
- IDE de Arduino
- Filezilla
- Putty o cualquier otro cliente SSH
Paso 1:Cargue el host de Firmata en Arduino Uno
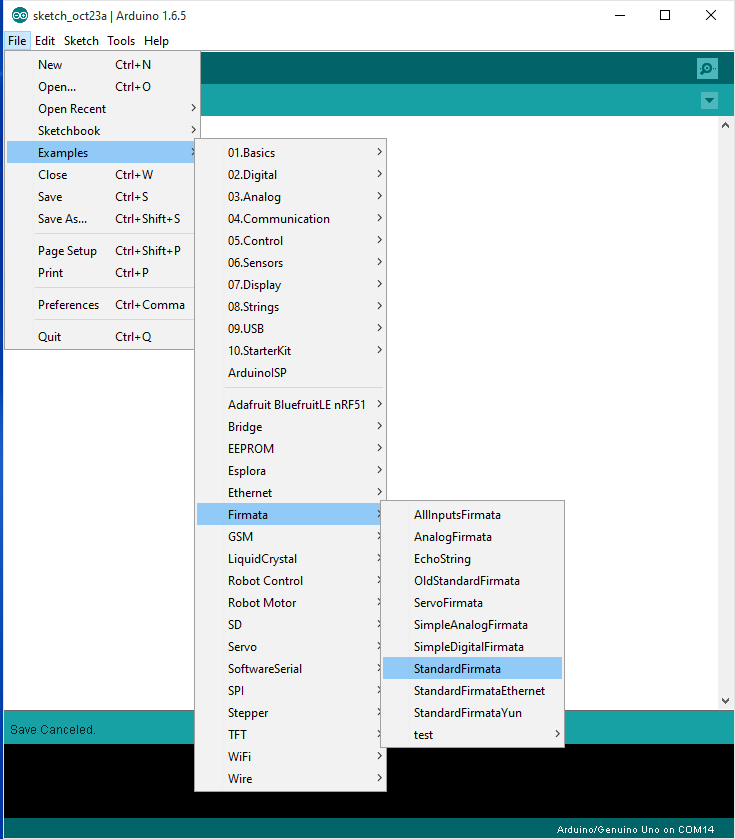
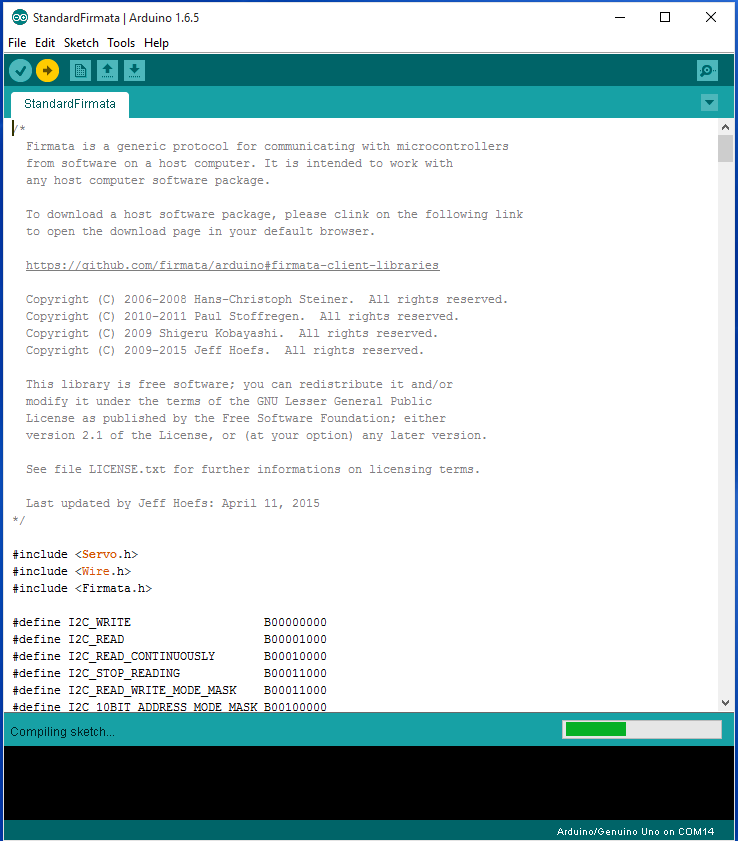
Abra StandardFirmata desde la pestaña de ejemplos. Seleccione placa y puerto. Sube!
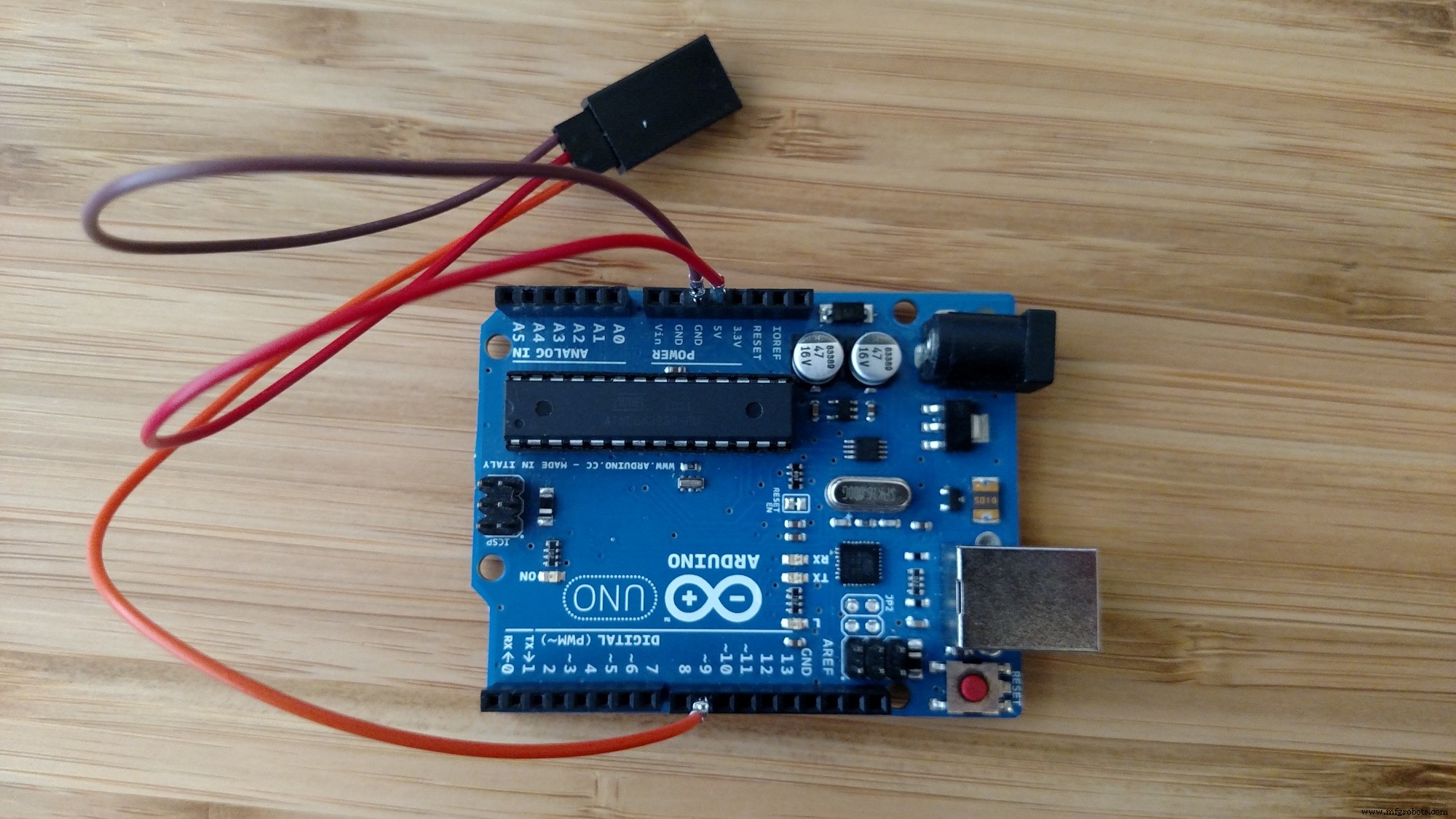
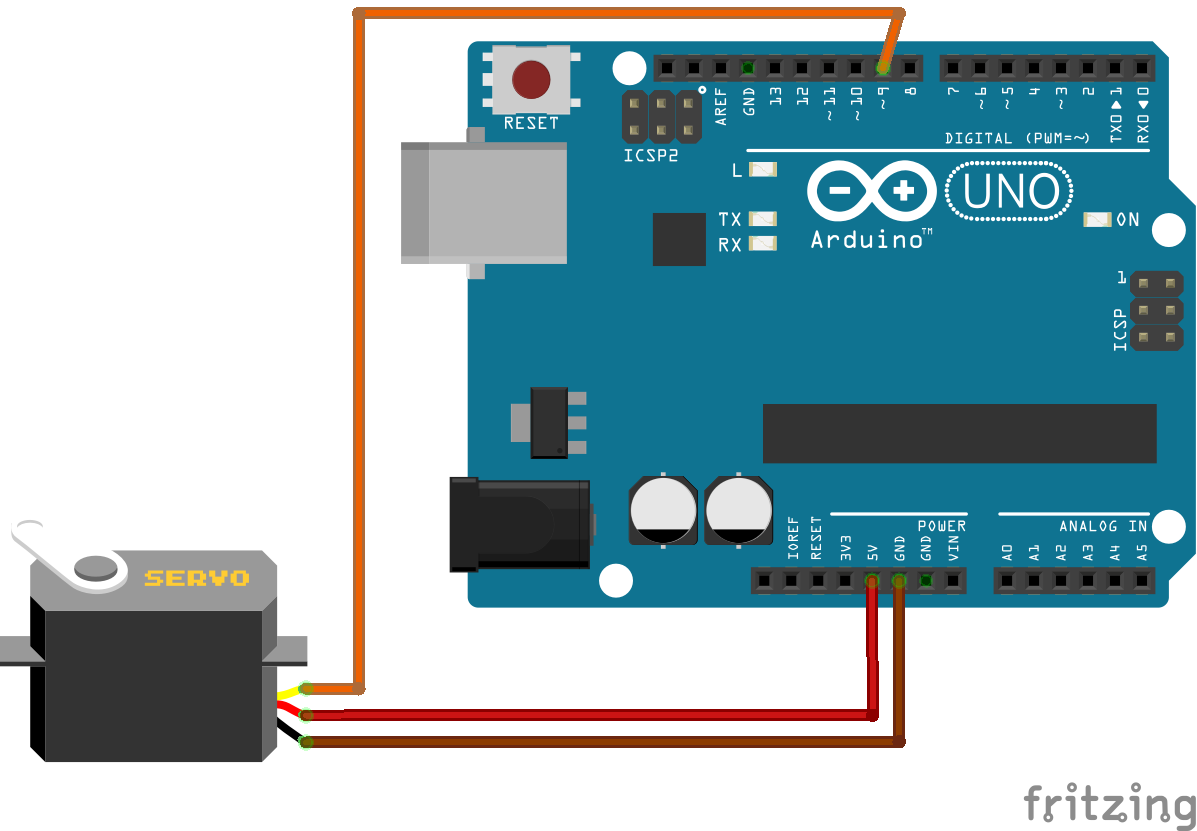
Paso 2:configuración del hardware
Piezas



Nota:La placa de conexión no se vende en este momento. Consulte aquí
Ensamblaje
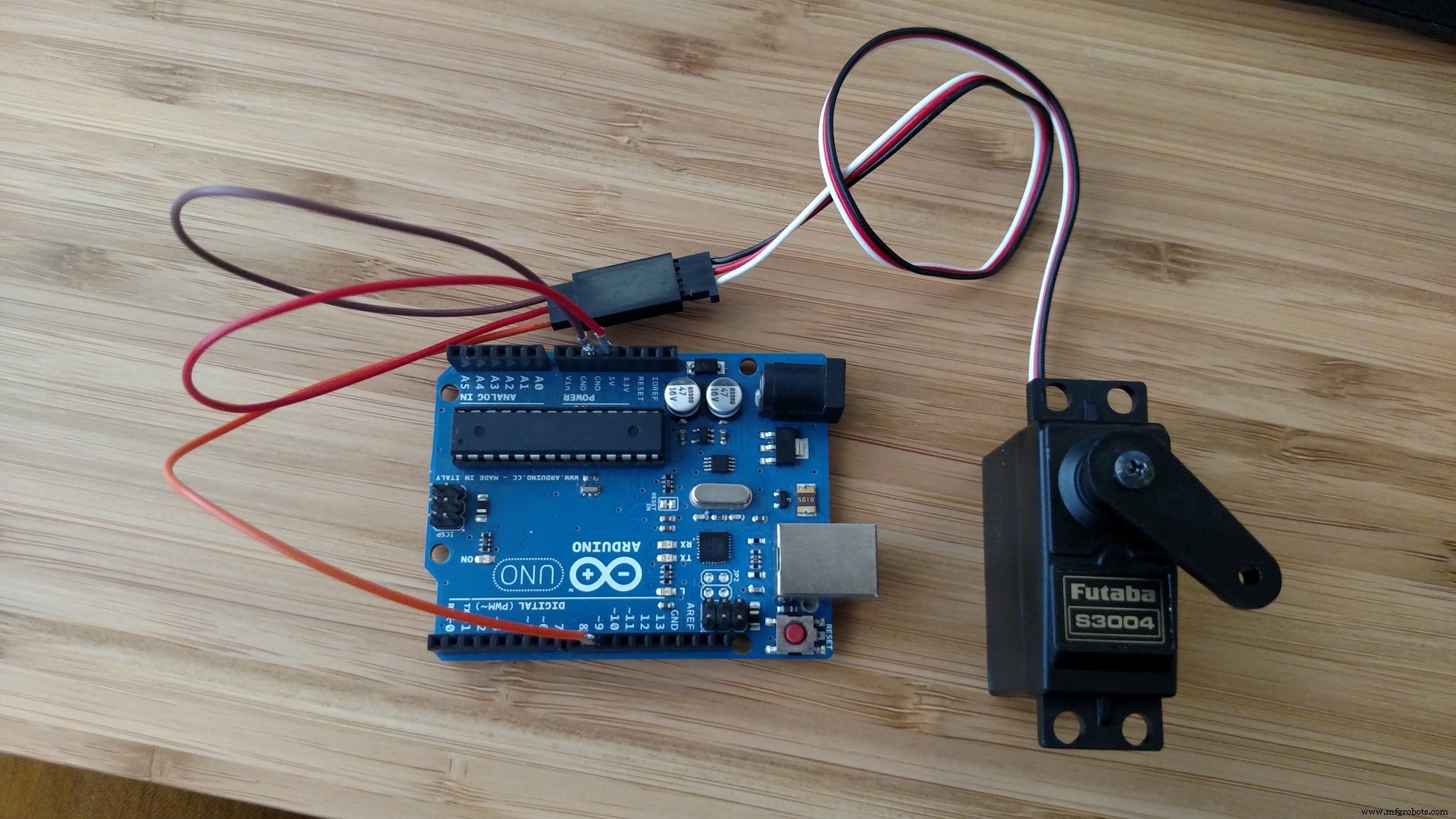



Encender

Paso 2:descargue pyMata y el código
pyMata
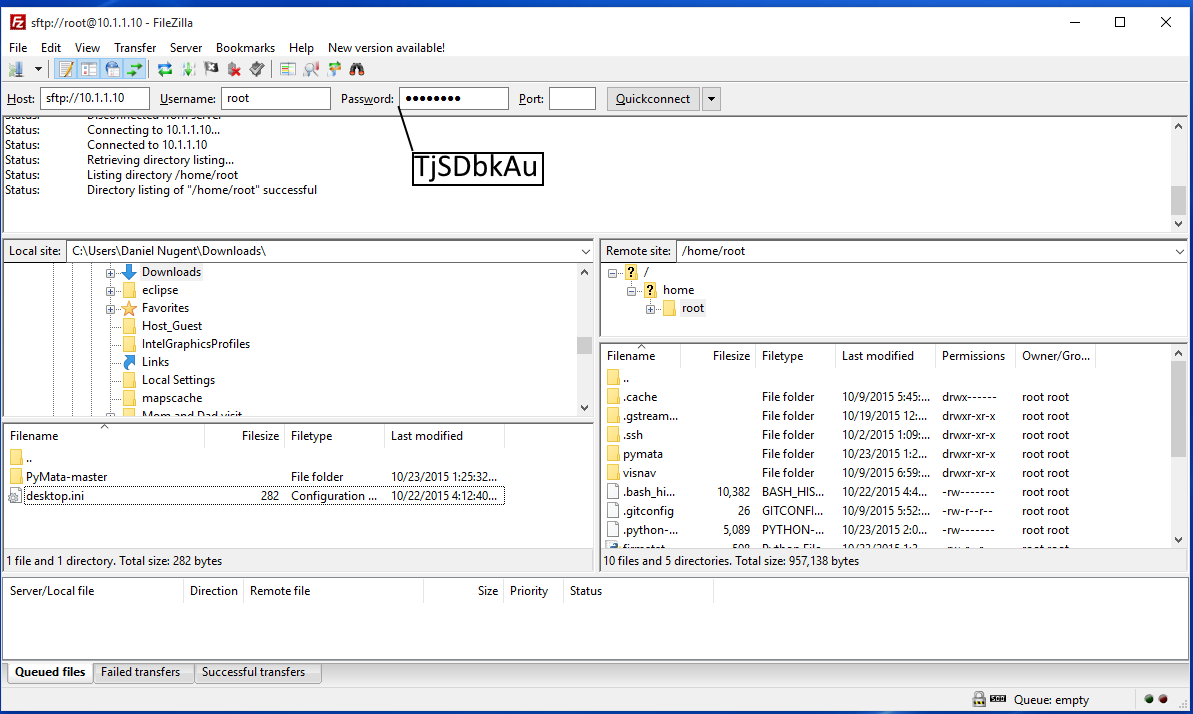
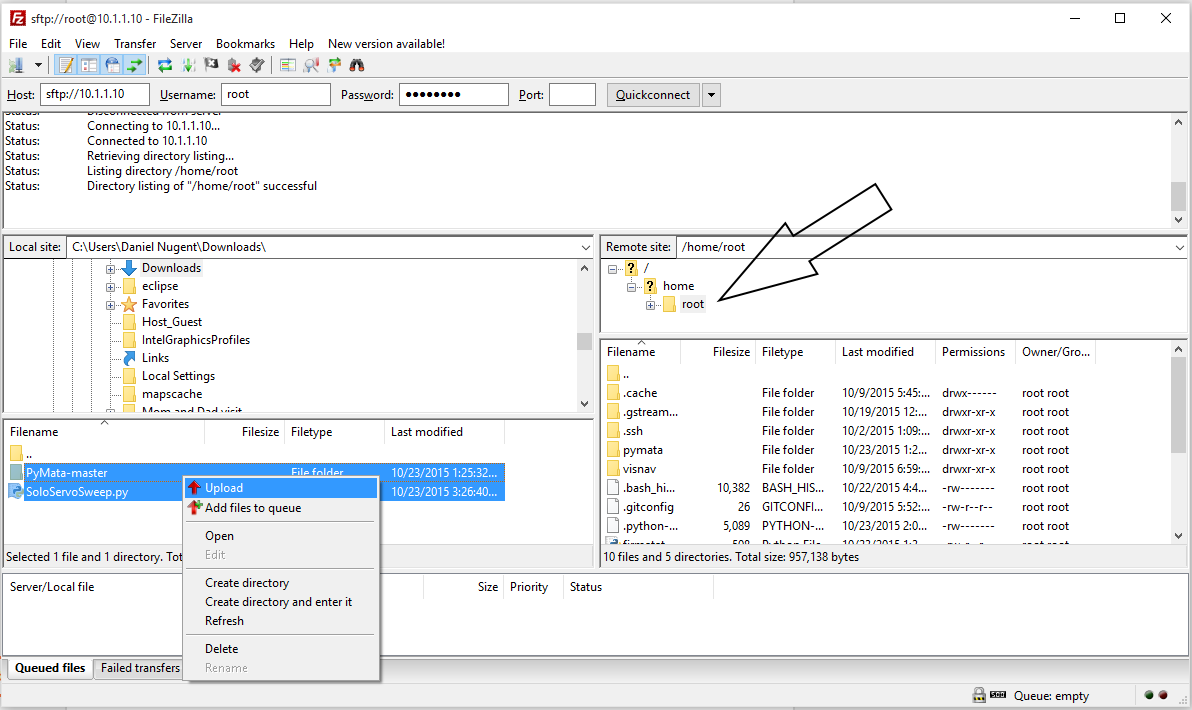
SoloServoSweep.pyPaso 3:transferir archivos a Solo
- ¡Conéctese a la red Wifi de Solo!
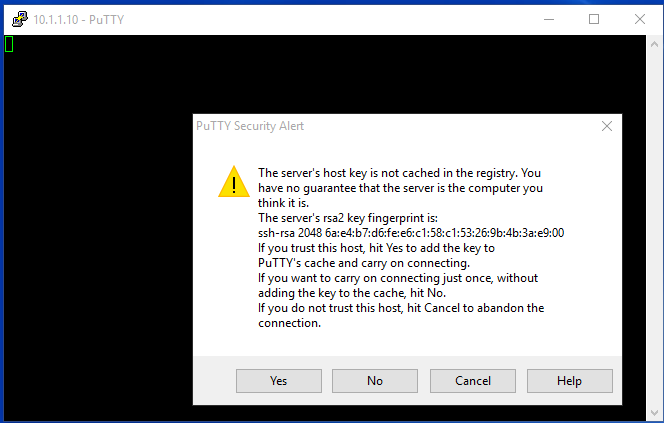
Paso 4:SSH en Solo
SSH en Solo usando el cliente SSH de su sistema operativo. Para Windows usaremos Putty.
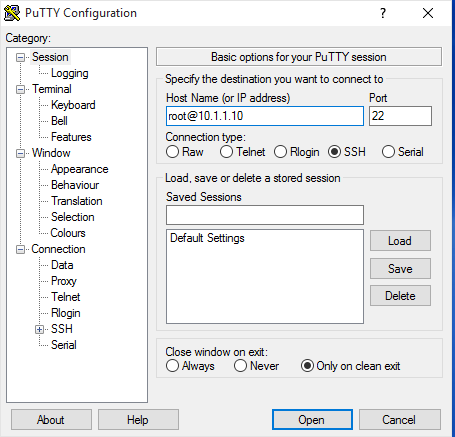
¡Asegúrate de estar todavía conectado al Wifi de Solo!
Consulte las leyendas de las fotos para obtener más detalles
Paso 5:Instale pyMata
Ejecute este comando en su sesión SSH:
Este debería ser tu resultado
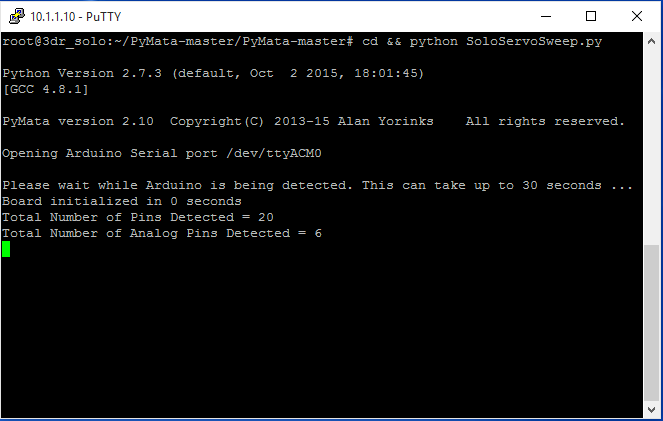
Paso 7:Ejecute el ejemplo
Mientras su sesión ssh aún está abierta, ejecute:
Código
- SoloServoSweep.py
SoloServoSweep.py Python
Manejar un servo en python desde Solo desde PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # servo adjunto a este pinEND =170 # Max servo travel # create a PyMata instanceboard =PyMata ("/ dev / ttyACM0") # configure pin como servoboard.servo_config (SERVO_MOTOR) try:while True:for i in range (0, END):# sweep up board.analog_write (SERVO_MOTOR, i) time.sleep (.015) for i in range (END, 0, - 1):# sweep down board.analog_write (SERVO_MOTOR, i) time.sleep (.015) excepto KeyboardInterrupt:board.close () sys.exit () Piezas y carcasas personalizadas
Tablero de conexión individual
Placa de conexión para el puerto de accesorios 3DR Solo https://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1Esquemas
Proceso de manufactura