


Coche robot controlado por pernos
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
Descargo de responsabilidad:
No se dañaron dispositivos electrónicos durante la realización de este proyecto.
Acto uno:Un buen día ...
Estuvimos trabajando desde la mañana y teníamos mucha documentación y pruebas de código en nuestras manos y necesitábamos desesperadamente un descanso, pero jugar al futbolín no era ideal, ya que nos sacaría de la zona. Entonces, para mantener la compostura, comenzamos a pensar en lo que podríamos hacer para relajarnos, pero que aún así nos mantendría en esa "zona de trabajo". Fue entonces cuando nuestro gerente sugirió "¿Por qué no haces un pequeño proyecto y lo subes a Hackster?". Bien, llame a Pranav.
Así que decidimos hacer un robot RC -espéralo-controlado por Internet con una pequeña característica adicional (que revelaremos más adelante porque el suspenso es importante).

Muy bien, nos animamos y nos apresuramos a ir a la ferretería interna.
Segundo acto:el bosque del hardware
Llegamos a la ferretería, está llena de kits y componentes que hacen que tus ojos brillen de codicia, tus manos serán atraídas hacia ellas y antes de que te des cuenta estarás soldando piezas para hacer una calculadora de 8 bits pero, estábamos enfocados y no dejamos que estas distracciones nos obliguen y simplemente tomamos lo que necesitábamos (tú también deberías)
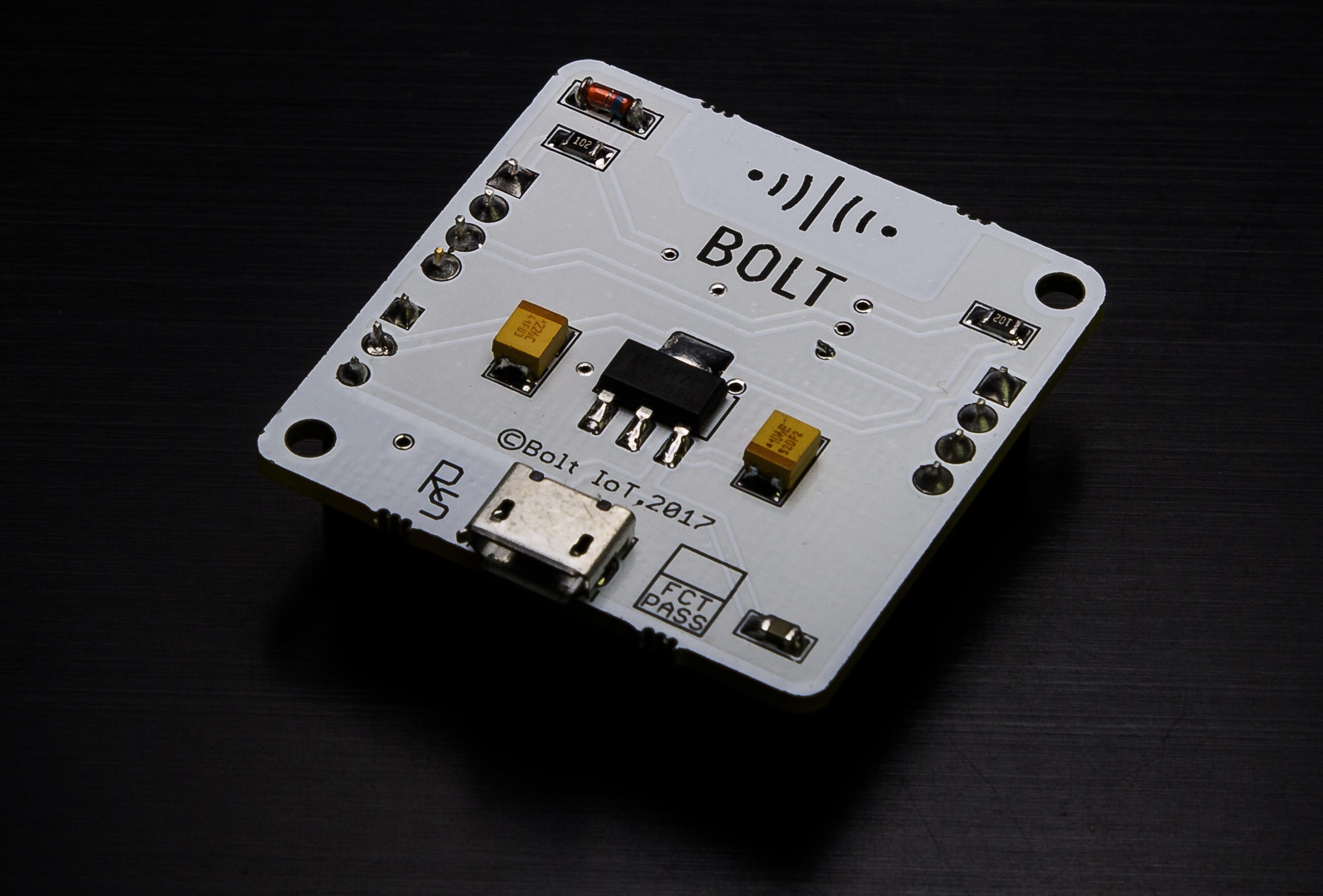
1. Módulo Wifi Bolt

2. Kit robótico básico

3. Arduino UNO o Boltduino


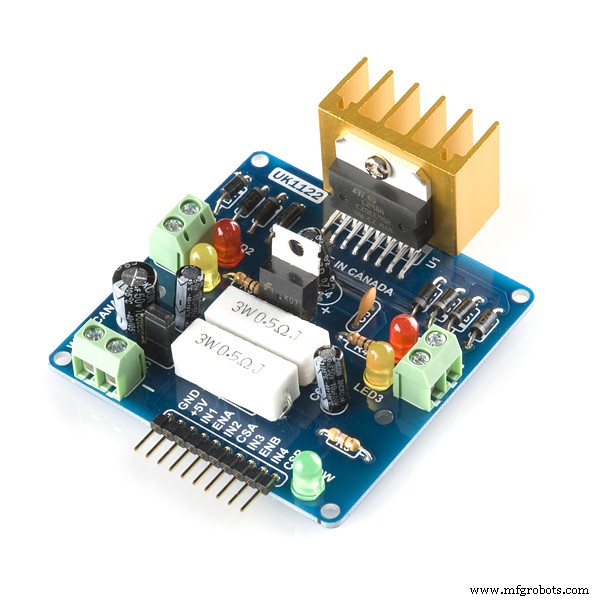
4. Escudo del controlador del motor L298N

5. Sensor de proximidad

6. Cables de puente

7. Adaptador de corriente

Tercer acto:forja
Regresamos sanos y salvos del Bosque de Hardware con todas las piezas que necesitábamos. Era hora de que Devashish, el alto señor de la ferretería, hiciera su magia y armara este pequeño robot.

Así es como hizo esto.
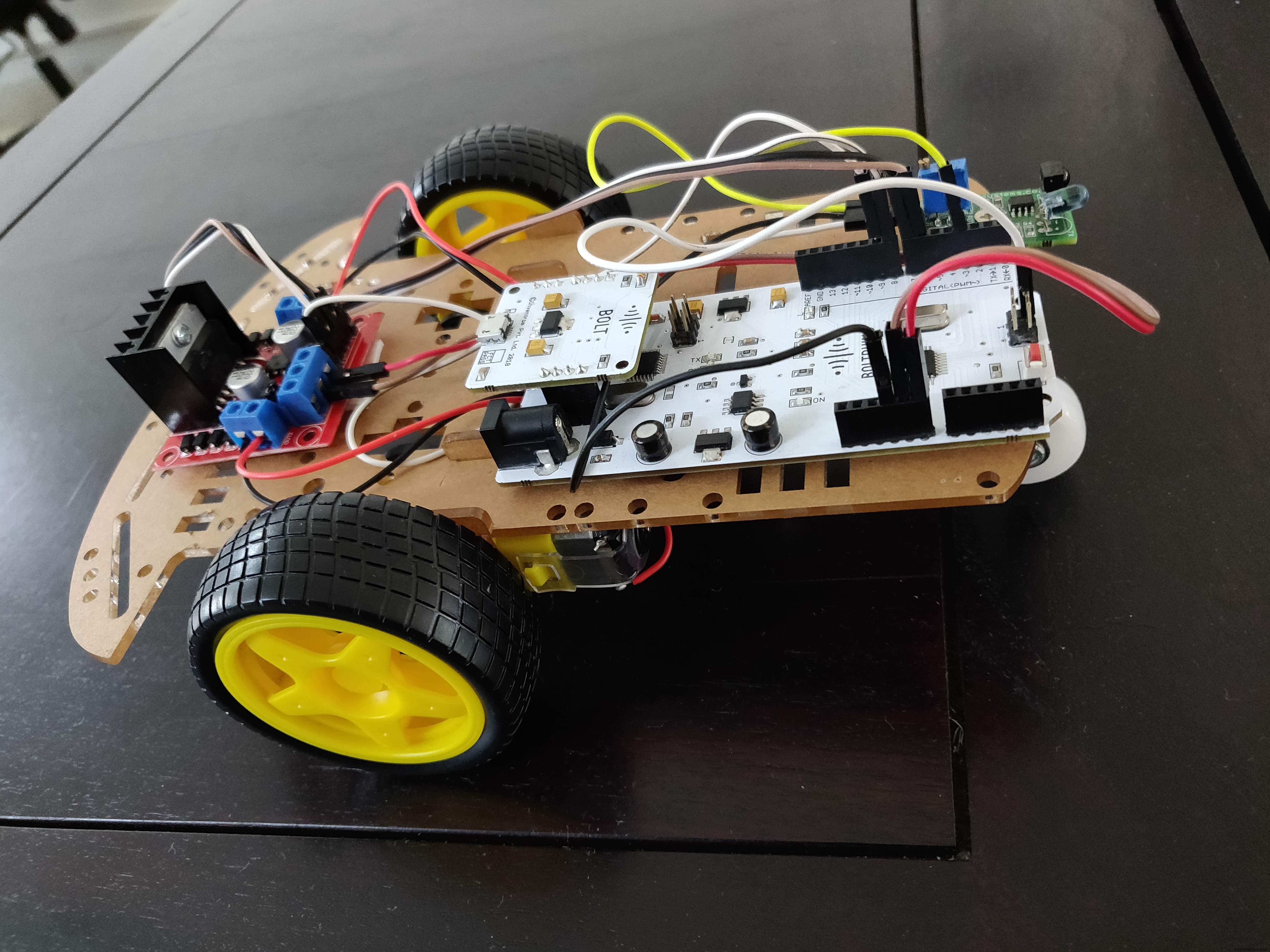
Montaje del hardware
1. Coloque la rueda giratoria en la parte delantera central del chasis como se muestra.
2. Ensamble el chasis del automóvil robótico y conecte los dos motores de CC con las tuercas y los pernos junto con las ruedas provistas como se muestra.
NOTA:Suelde los cables al terminal del motor antes de conectarlo al chasis.
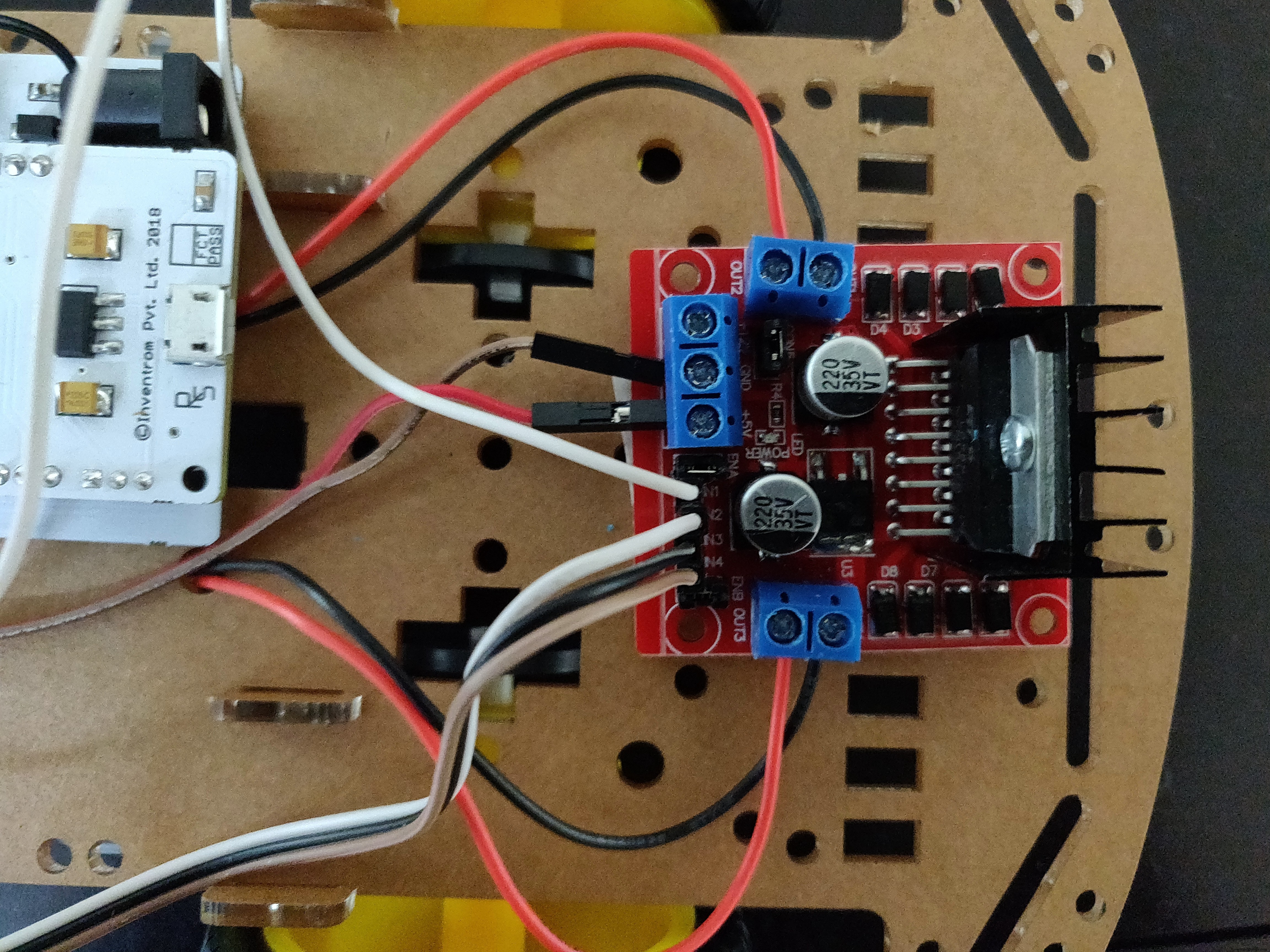
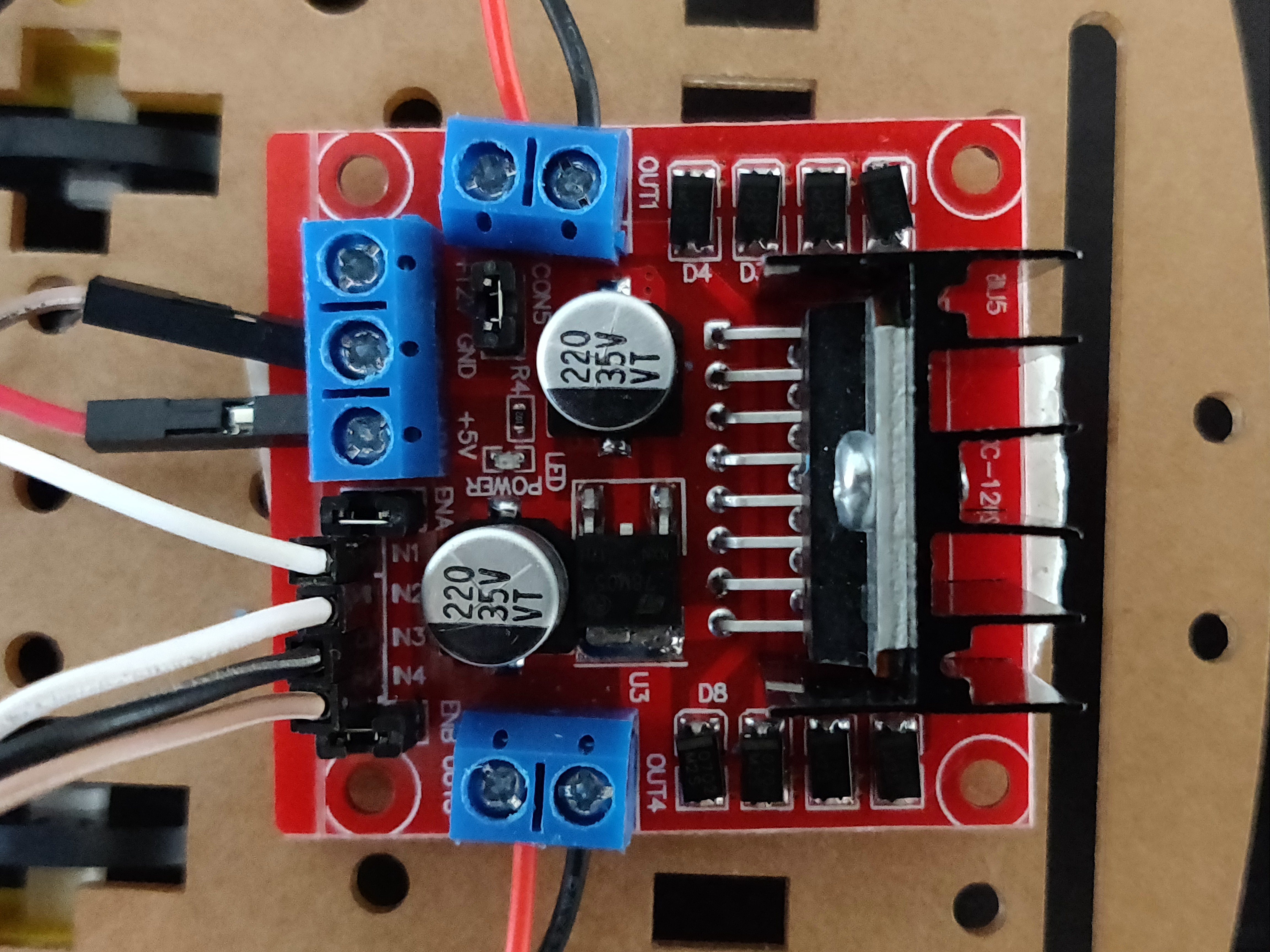
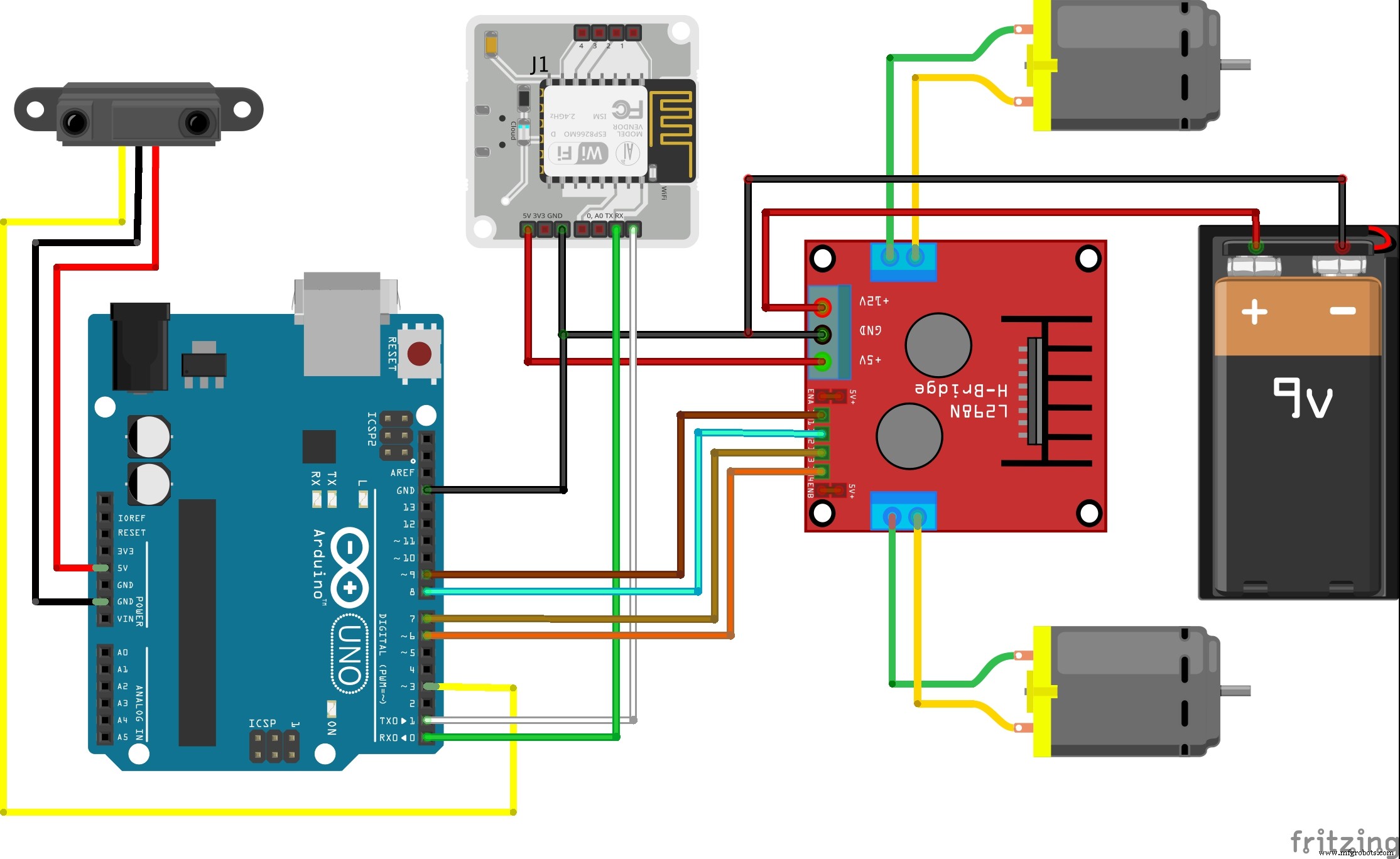
3. Ahora conecte los terminales del motor al módulo del controlador del motor L298N como se muestra a continuación.
NOTA:Conecte ambos terminales del motor en el mismo lado del módulo del controlador.
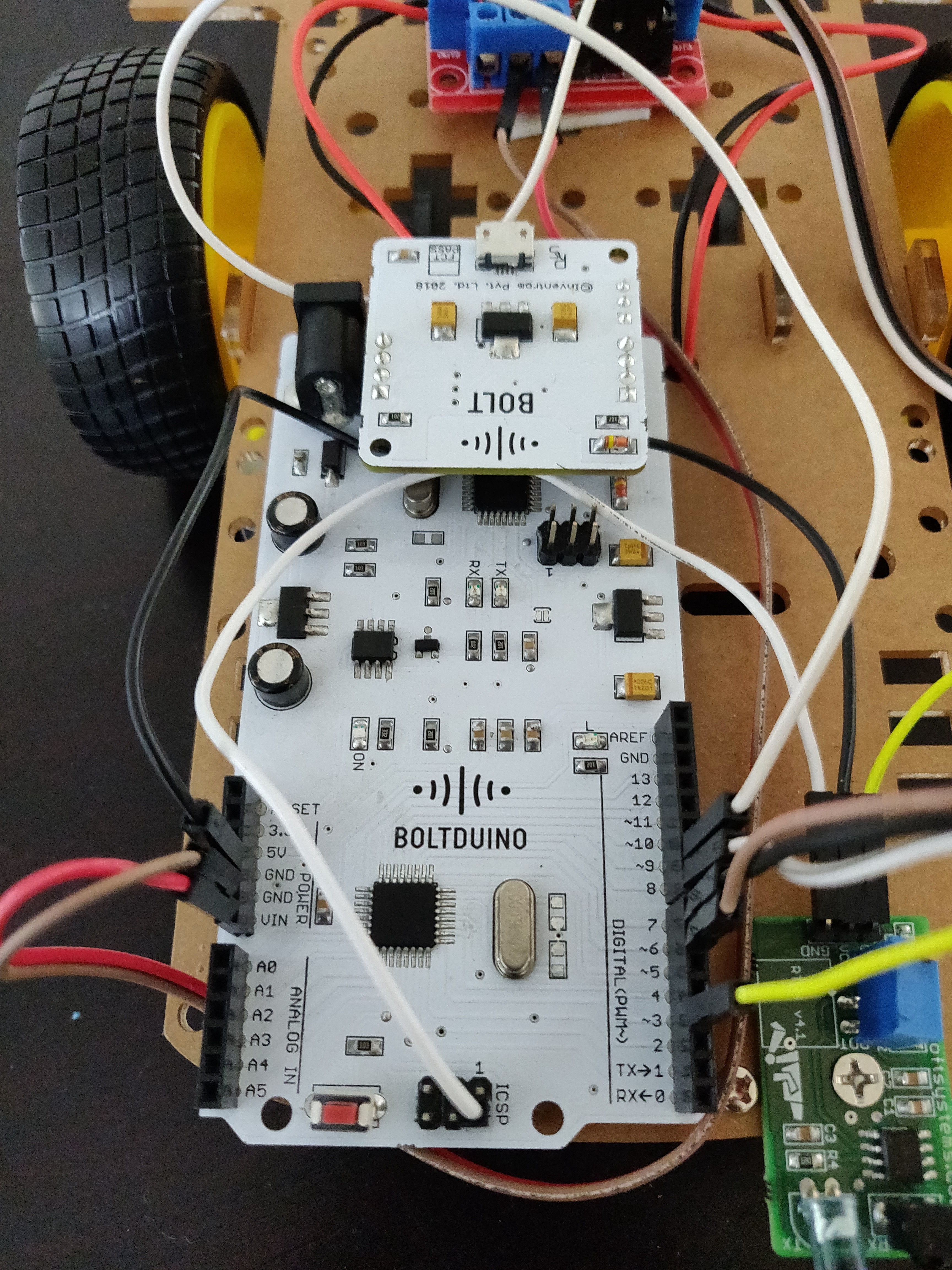
4. Conecte el pin 5V y el pin GND del módulo del controlador a 5V y GND de Arduino respectivamente.
5. Conecte los pines 5V, GND, Tx y Rx de Bolt a los pines 5V, GND, Rx y Tx de Arduino respectivamente. Para Boltduino, coloque la unidad Bolt en la ranura presente.
6. Conecte los cuatro terminales de entrada (IN1, IN2, IN3, IN4) a los pines 6, 7, 8 y 9 respectivamente.
7. Conecte los pines 5V, GND y OUT del sensor de proximidad a los pines 5V, GND y 3 de Arduino respectivamente.


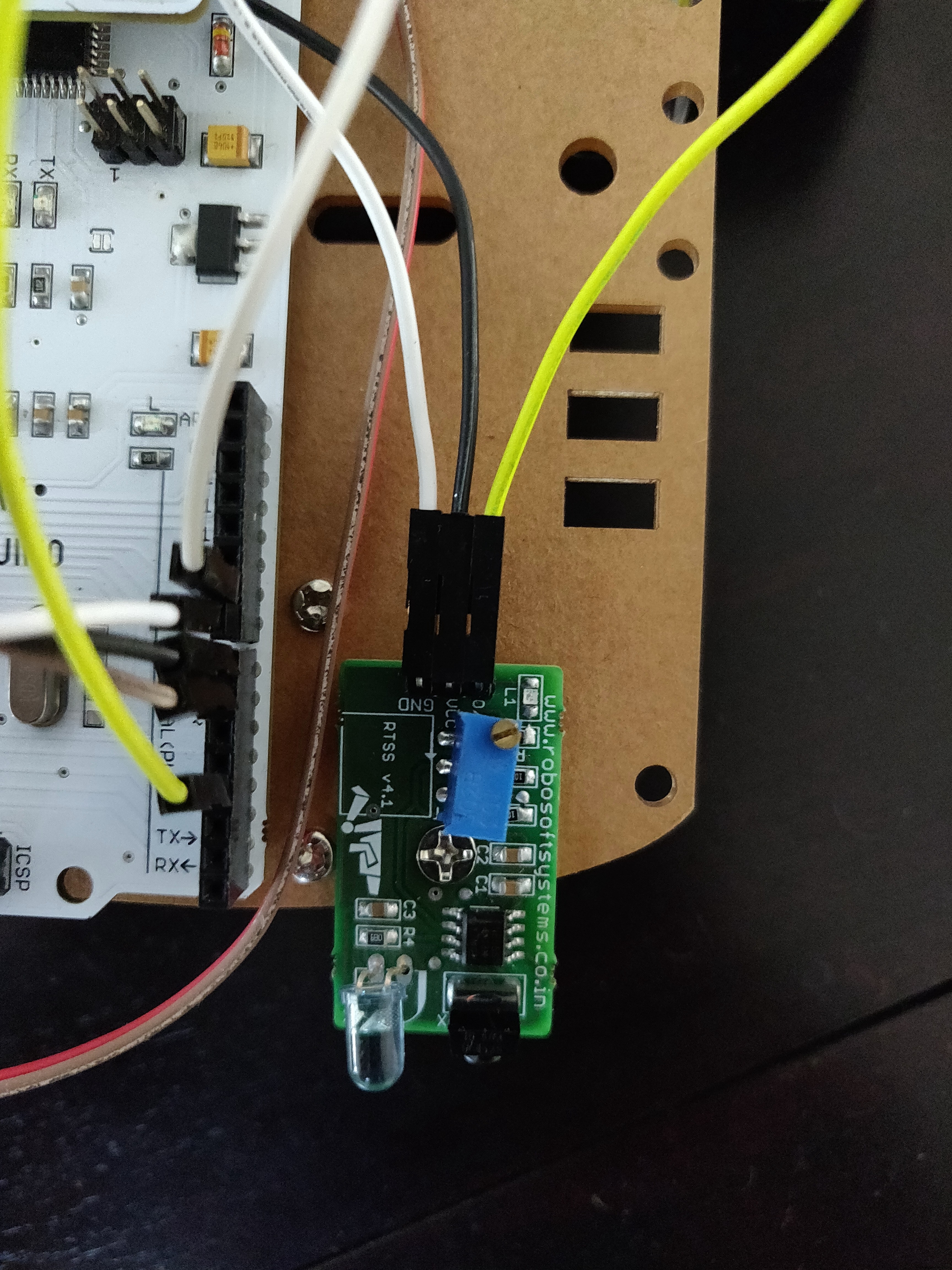
NOTA:para cualquier más ayuda para ver los esquemas que se dan a continuación.
Conectando Bolt a la nube
Después de ensamblar el hardware, registre y conecte la unidad Bolt a Bolt Cloud. Obtenga más información sobre cómo registrar y conectar Bolt a la nube.
Cuarto acto:y luego hubo conectividad
Ahora el Highlord of Hardwarey envió por el Asesino de Kiln of Code (es decir, yo).
Se le encomendó la tarea de darle vida a este robot con su código y conectarlo a la Nube. Siga sus pasos para que su robot también funcione.
Paso 1: Obtener el código.
Obtén el código del repositorio de Github de este proyecto. Descargue un archivo .zip o clónelo en su sistema, lo que más le convenga.
Paso 2: Trabajando con el código.
Hay dos partes de código:
- Una carpeta llamada aplicación
- Dentro de esta carpeta hay dos archivos i. controller.html ii. controller.js. Hablaremos de ellos más tarde.
- Luego está el firmware para su Arduino en un archivo llamado Bolt_Robot_Car.ino . Esto se actualizará / cargará en su Arduino.
Paso 3: Configuración arriba Arduino.
Una vez que haya terminado de configurar su hardware y conectar su perno a la nube, cargue el firmware presente en el archivo Bolt_Robot_Car.ino a tu Arduino. Para saber cómo configurar Arduino IDE y cargar un código en Arduino, siga este enlace.
Paso 4: El Controlador Aplicación.
Haga doble clic en controller.html archivo y debería aparecer la siguiente página web.
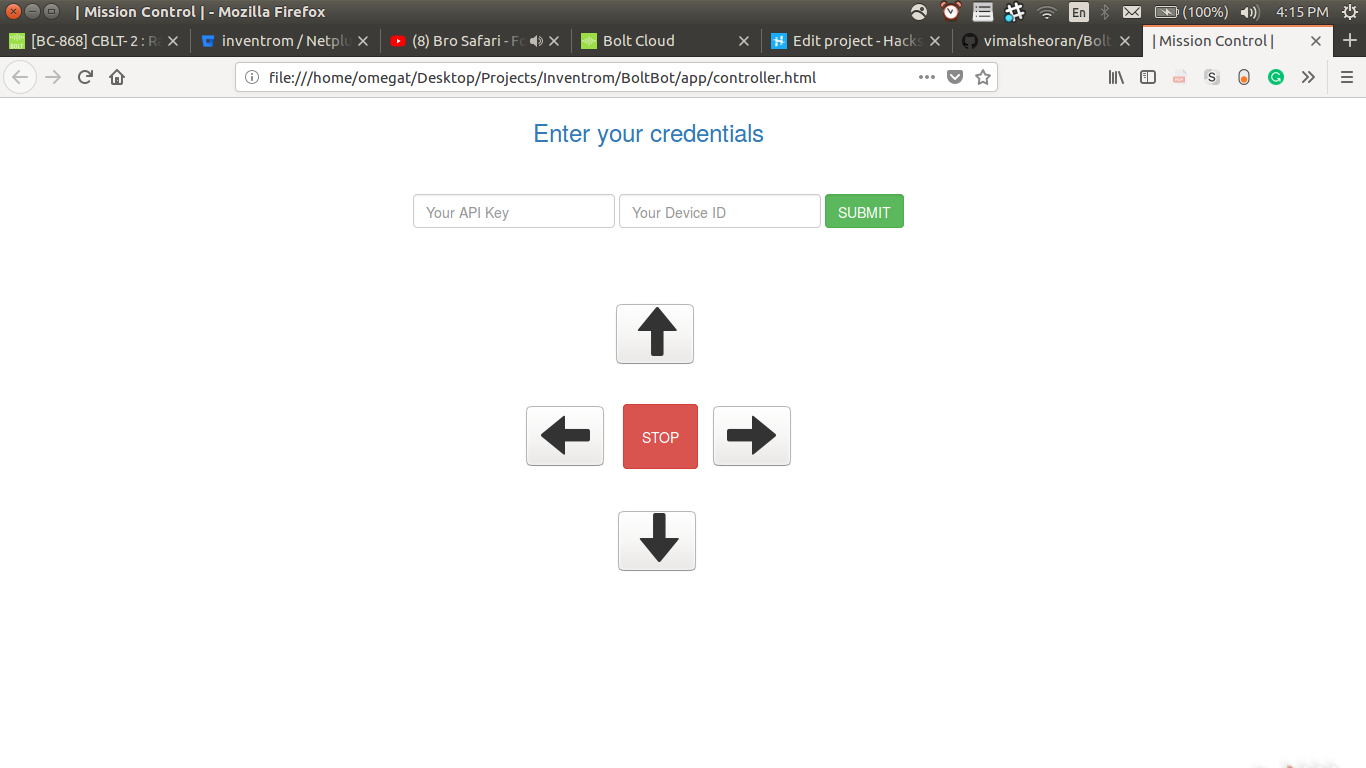
Ahora ingrese su clave API y ID de dispositivo en sus respectivos campos y presione ENVIAR. Puede obtener su clave API y ID de dispositivo desde su panel de Bolt Cloud.
Después de esto, puede usar los botones de control para controlar el movimiento de su robot. Al presionar el botón, se activan funciones específicas de JavaScript (consulte el archivo controller.js ) para enviar comandos a Bolt Cloud y luego a su módulo WiFi Bolt. Ahora tienes un robot RC que hace lo que quieras con él. Se pueden hacer varias cosas con esto, puede conectarle algunos sensores o hacerlo automático o lo que desee. Y si te equivocas, no te preocupes, los nativos de Maker Land estamos aquí para ayudarte en cualquier momento.
Quinto acto:huevos de Pascua
Sé que algunos de ustedes podrían estar pensando "Oye, dijiste que había una función adicional, ¿dónde está?" Bueno, no te preocupes, no te dejaremos drogado y seco, pero es muy probable que ya hayas notado la función en ActThree:Forja si no lo has hecho, échale un vistazo de nuevo. Pero, bueno, ¿quién tiene ese tipo de tiempo? TL; DR su robot se detendrá automáticamente si encuentra un obstáculo o un bloqueo en su camino para que no termine aplastándolo contra la pared. De acuerdo, ese es el final de esta historia, eche un vistazo a este video para ver el video tutorial de este proyecto.
Demostración:
Código
BoltBot
https://github.com/vimalsheoran/BoltBotEsquemas
Proceso de manufactura
- Componentes principales de un automóvil y sus funciones
- Robot Raspberry Pi controlado por Bluetooth
- Robot controlado por gestos con Raspberry Pi
- ROBOT WIFI DE FRAMBUESA PI CONTROLADO DESDE EL TELÉFONO INTELIGENTE DE ANDROID
- Windows 10 IoT Core:Robot controlado por voz
- Robot controlado por Wifi usando Raspberry Pi
- ROObockey:Robot de hockey callejero asistido por objetivo y controlado a distancia
- Coche RC controlado por joystick
- Robot controlado por voz
- Brazo robótico controlado a través de Ethernet
- MobBob:Robot Arduino DIY controlado por un teléfono inteligente Android