


Robot de 4 ruedas hecho con Arduino controlado usando Dabble
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicaciones y servicios en línea
 |
| |||
|
Acerca de este proyecto
¡Otro proyecto, otra idea de regalo lista para usar! Le presentamos el robot de 4 ruedas controlado por Dabble, un robot simple y divertido de construir y fácil de controlar que se puede controlar a través de Bluetooth usando Dabble, una aplicación móvil desarrollada por nosotros. Todo lo que necesita para hacer su robot es una placa Arduino Uno, chasis, ruedas, ejes de motor y otros accesorios y herramientas. Para controlarlo, debe instalar Dabble desde Google Play y emparejarlo con Bluetooth; ¡y tu robot está listo para ir a cualquier lugar!
¿Qué mejor manera de terminar el año con el mismo espíritu de bricolaje con el que comenzó, verdad? ¡Entonces, Qué esperas!
Entonces, ¡comencemos!
Paso 1:Cosas que necesitará
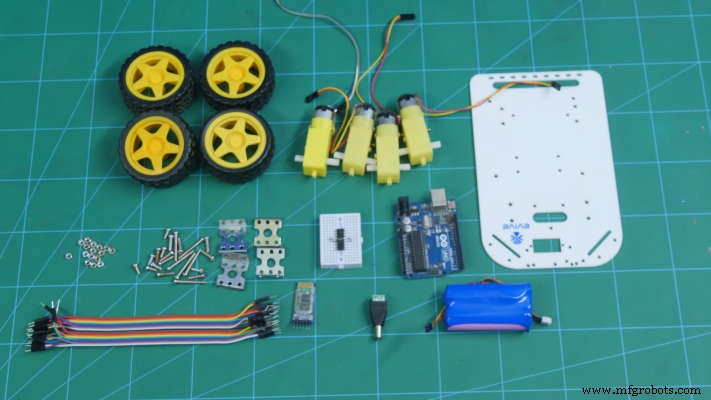
- Placa Arduino Uno
- Protoboard
- Chasis
- Soportes de motor
- Motores de CC
- Rueda
- Controlador de motor
- Módulo Bluetooth HC05
- Bloque de terminales de CC
- Batería
- Cables de puente
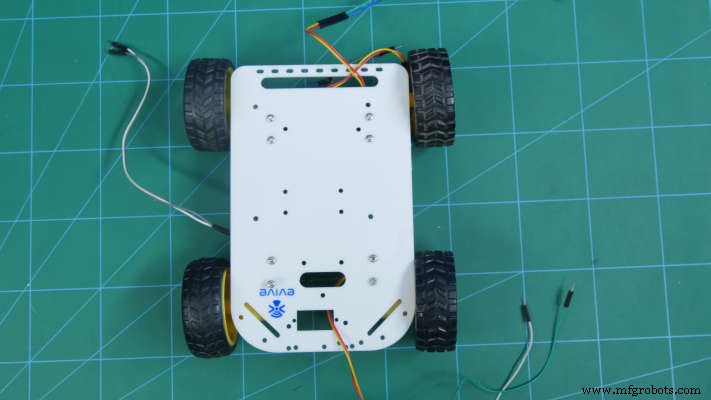
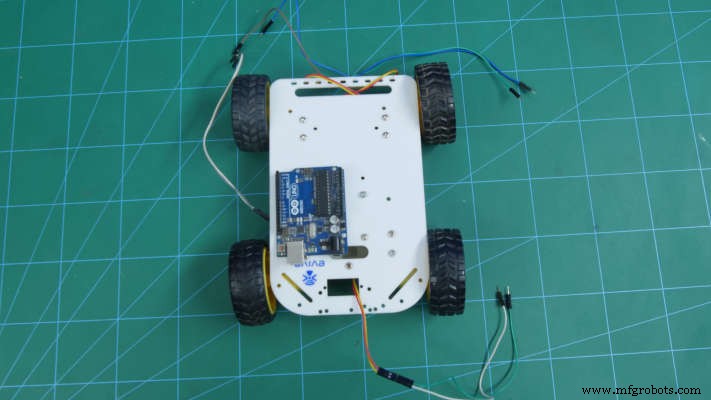
Paso 2:creación del cuerpo
En primer lugar, comenzaremos a hacer el cuerpo del robot de 4 ruedas.
Tome el chasis y déle la vuelta.

En este chasis, monte 4 soportes de motor con pernos y tuercas M3.
Fije los motores de CC y fíjelos en los soportes del motor con tuercas y pernos M2.
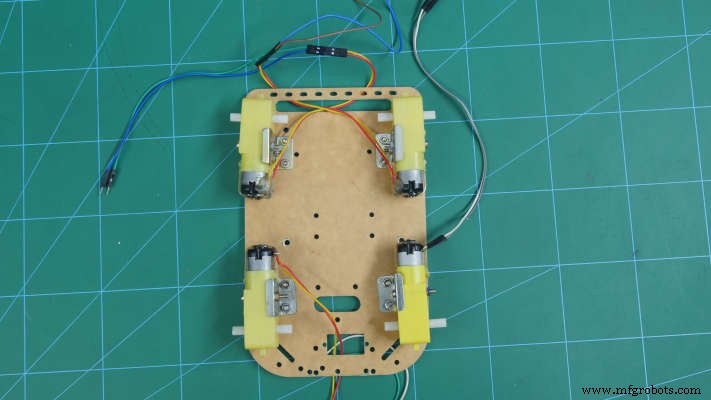
Coloque ruedas en cada eje del motor de CC.

Voltee el ensamblaje, así se crea su cuerpo.
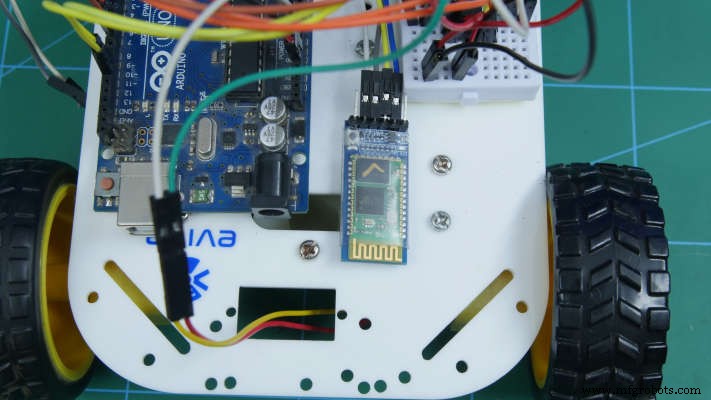
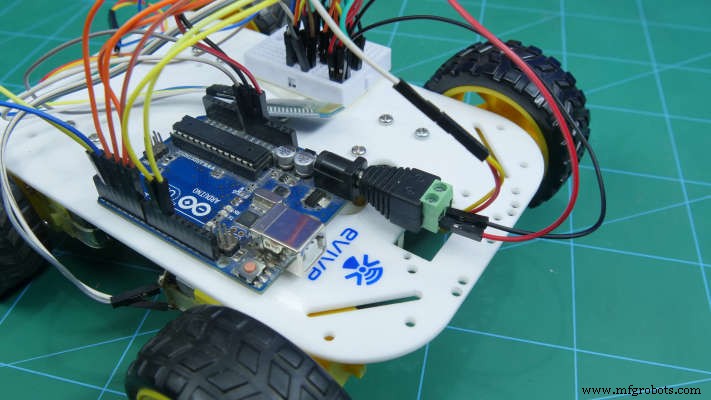
Paso 3:agregando el cerebro
El microcontrolador que vamos a utilizar es Arduino Uno.

Vamos a hacer todas las conexiones en él, pero también usaremos un tablero para hacer las conexiones.
Paso 4:hacer conexiones y usar el controlador de motor
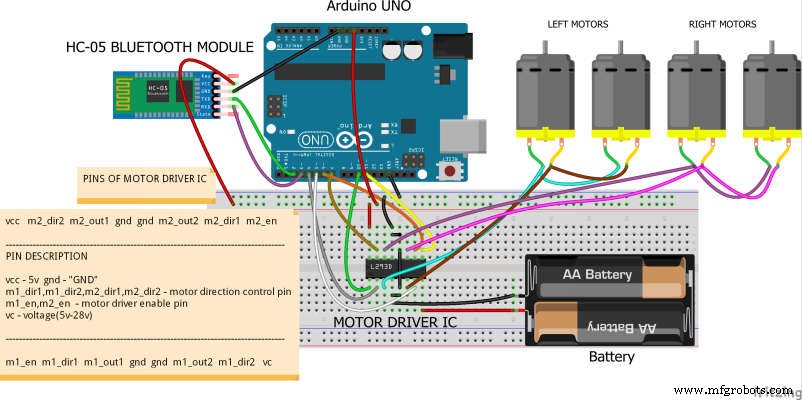
Realice la conexión como se muestra en la siguiente figura.
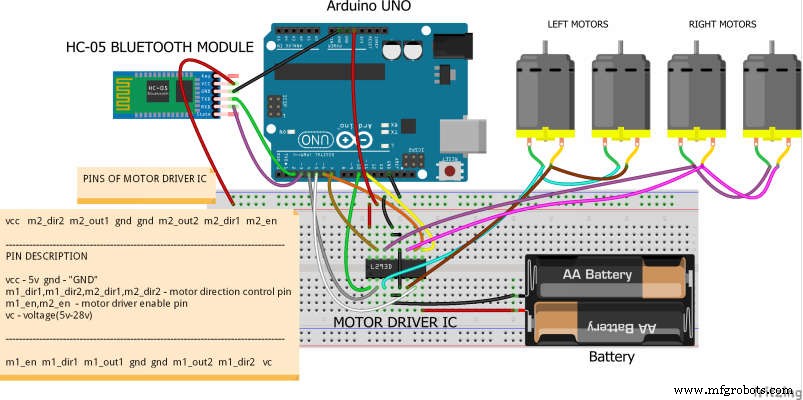
Vamos a hacer uso de los controladores de motor porque Arduino Uno no proporciona suficiente energía para hacer funcionar 4 motores. Por lo tanto, agregaremos el controlador del motor, podremos darle al robot la energía necesaria.
Los dos motores de la izquierda están conectados en paralelo. Del mismo modo, los dos motores de la derecha también están conectados en paralelo. Las conexiones se realizan de la siguiente manera:
- Habilitar pines:pines digitales 10 y 11
- VCC - Arduino 5V
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 - Pin digital 4, 5, 6 y 7
- VC:batería externa
- GND - GND de Arduino y batería Asegúrese de conectar todos los cables GND juntos.
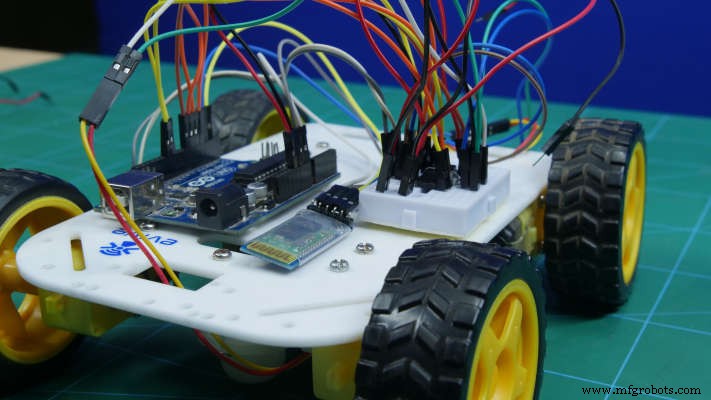
Paso 5:Conexión del teléfono inteligente
Necesitamos agregar un módulo que hará la conexión entre su robot y la aplicación Dabble en el teléfono inteligente.
Estamos tomando el módulo Bluetooth HC05. Conéctelo como se muestra en la figura de conexión.
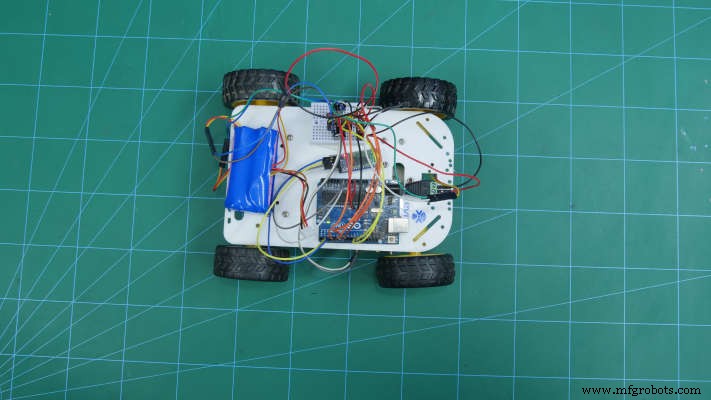
Paso 6:agregar la batería
Necesitaremos agregar una fuente de energía adicional a nuestro robot. Además, para conectar Arduino Uno con la batería vamos a utilizar DC Terminal Block o DC Jack.
Paso 7:Código Arduino
Sube el siguiente código:
robot.ino
Paso 8:trabajando
Podemos conectar fácilmente nuestro robot a nuestro teléfono inteligente usando Dabble.
Antes de trabajar con cualquiera de los módulos, debe conectar el Bluetooth en el que está trabajando.
Hay muchos módulos disponibles en la aplicación para otras funcionalidades.
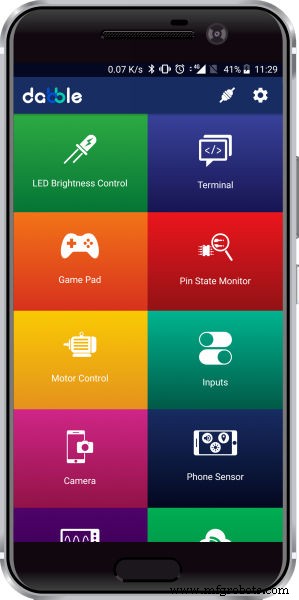
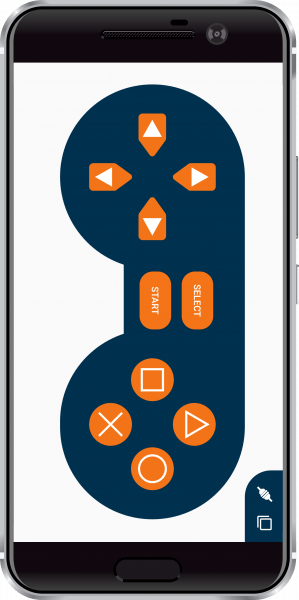
Hoy trabajaremos con el módulo Gamepad.
Y usaremos el conjunto de botones izquierdo:
- Arriba - Avanzar
- Abajo - Mover hacia atrás
- Izquierda - Gire a la izquierda
- Derecha - Gire a la derecha
Paso 9:Conclusión
¡Con esto, su robot de 4 ruedas controlado por DIYDabble está listo para la acción!
Psst! Para tu información, Dabble puede hacer mucho más que controlar robots de forma inalámbrica. ¡Puedes explorar más sobre esto aquí!
Código
- robot.ino
- biblioteca evive
robot.ino Arduino
/ * * * este proyecto demuestra el control del robot arduino de 4 ruedas usando la aplicación Dabble * usaremos el módulo gamepad en modo digital * para obtener más información sobre gamepad, visite https://thestempedia.com/docs/dabble/game- pad-module / * * en este proyecto usaremos el módulo bluetooth HC-05 * para arduino "UNO" use el módulo bluetooth buadrate por debajo de 38400 * * conexión del módulo bluetooth con arduino * * módulo bluetooth HC-05 ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Escrito por Punit chotaliya, STEMpedia * el 16 de enero de 2019 * * /// Para incluir el módulo GamePad en el programa Arduino, tiene que // incluir el siguiente encabezado:#define CUSTOM_SETTINGS # definir INCLUDE_GAMEPAD_MODULE // incluir la biblioteca de aplicaciones Dabble #include#define motor1_en 10 // motor 1 enable pin #define motor2_en 11 // motor 2 enable pin # define motor1_dir1 4 // motor 1 input1 (InputA) #define motor1_dir2 5 // motor 1 input2 (InputA) #define motor2_dir1 6 // motor 2 input1 (InputB) #define mo tor2_dir2 7 // motor 2 input2 (InputB) void setup () {// ponga su código de configuración aquí, para que se ejecute una vez:Serial.begin (9600); // iniciar la comunicación serial usando 9600 baudrate Dabble.begin (38400); // Ingrese la velocidad en baudios del módulo bluetooth // NOTA:para arduino "UNO" use el módulo bluetooth buadrate por debajo de 38400 para (unsigned int i =4; i <8; i ++) {pinMode (i, OUTPUT); // declarando los pines de entrada de motor1 y motor2 como un pin de salida} pinMode (motor1_en, OUTPUT); // declarando los pines de habilitación del motor como salida pinMode (motor2_en, OUTPUT); } void loop () {// ponga su código principal aquí, para que se ejecute repetidamente:Dabble.processInput (); // Para actualizar los datos que el arduino UNO obtuvo de la aplicación móvil, debe usar la siguiente línea de código if (GamePad.isUpPressed ()) // si se presiona ARRIBA en el gamepad, mueva el robot hacia adelante {Serial.print ("ARRIBA"); adelante(); } else if (GamePad.isDownPressed ()) // si se presiona ABAJO en el gamepad, mueva el robot hacia atrás {Serial.print ("ABAJO"); hacia atrás(); } else if (GamePad.isLeftPressed ()) // si se presiona IZQUIERDA en el controlador, mueva el robot IZQUIERDA {Serial.print ("Izquierda"); izquierda(); } else if (GamePad.isRightPressed ()) // si se presiona DERECHA en el gamepad, mueva el robot a la DERECHA {Serial.print ("Derecha"); derecho(); } else // detener el robot {Serial.println ("strop"); Detener(); }} void forward () // función para el movimiento de avance del robot {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, ALTO); digitalWrite (motor1_dir2, BAJO); digitalWrite (motor2_dir1, ALTO); digitalWrite (motor2_dir2, BAJO); } void backward () // función para el movimiento hacia atrás del robot {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, BAJO); digitalWrite (motor1_dir2, ALTO); digitalWrite (motor2_dir1, BAJO); digitalWrite (motor2_dir2, ALTO); } void left () // función para movimiento a la izquierda del robot {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, BAJO); digitalWrite (motor1_dir2, ALTO); digitalWrite (motor2_dir1, ALTO); digitalWrite (motor2_dir2, BAJO); } void right () // función para el movimiento a la derecha del robot {analogWrite (motor1_en, 255); analogWrite (motor2_en, 255); digitalWrite (motor1_dir1, ALTO); digitalWrite (motor1_dir2, BAJO); digitalWrite (motor2_dir1, BAJO); digitalWrite (motor2_dir2, ALTO); } void Stop () // // función para ningún movimiento {analogWrite (motor1_en, 0); analogWrite (motor2_en, 0); digitalWrite (motor1_dir1, BAJO); digitalWrite (motor1_dir2, BAJO); digitalWrite (motor2_dir1, BAJO); digitalWrite (motor2_dir2, BAJO); }
biblioteca evive C / C ++
Sin vista previa (solo descarga).
Esquemas
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Cree su robot de transmisión de video controlado por Internet con Arduino y Raspberry Pi
- Robot controlado por Wifi usando Raspberry Pi
- Atenuación de luces con PWM usando el botón pulsador
- Juguete controlado por Android con Raspberry Motor Shield
- Obstáculos que evitan el robot con servomotor
- Robot seguidor de línea
- Brazo robótico controlado por Nunchuk (con Arduino)
- Robot controlado por voz
- MobBob:Robot Arduino DIY controlado por un teléfono inteligente Android
- Robot de piano controlado por Arduino:PiBot