


Crea un robot para comer con Arduino Nano | Tornillo dorado
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
La idea de este proyecto vino de mi hija.
Quiere un robot, y este robot puede abrir la boca para poder llevarse comida a la boca.
Entonces, busqué en el interior las cosas que estaban disponibles:cartón, Arduino Nano, sensor ultrasónico, servomotor ... para poder crear un robot para que las niñas jueguen en el tiempo más rápido y al menor costo posible.
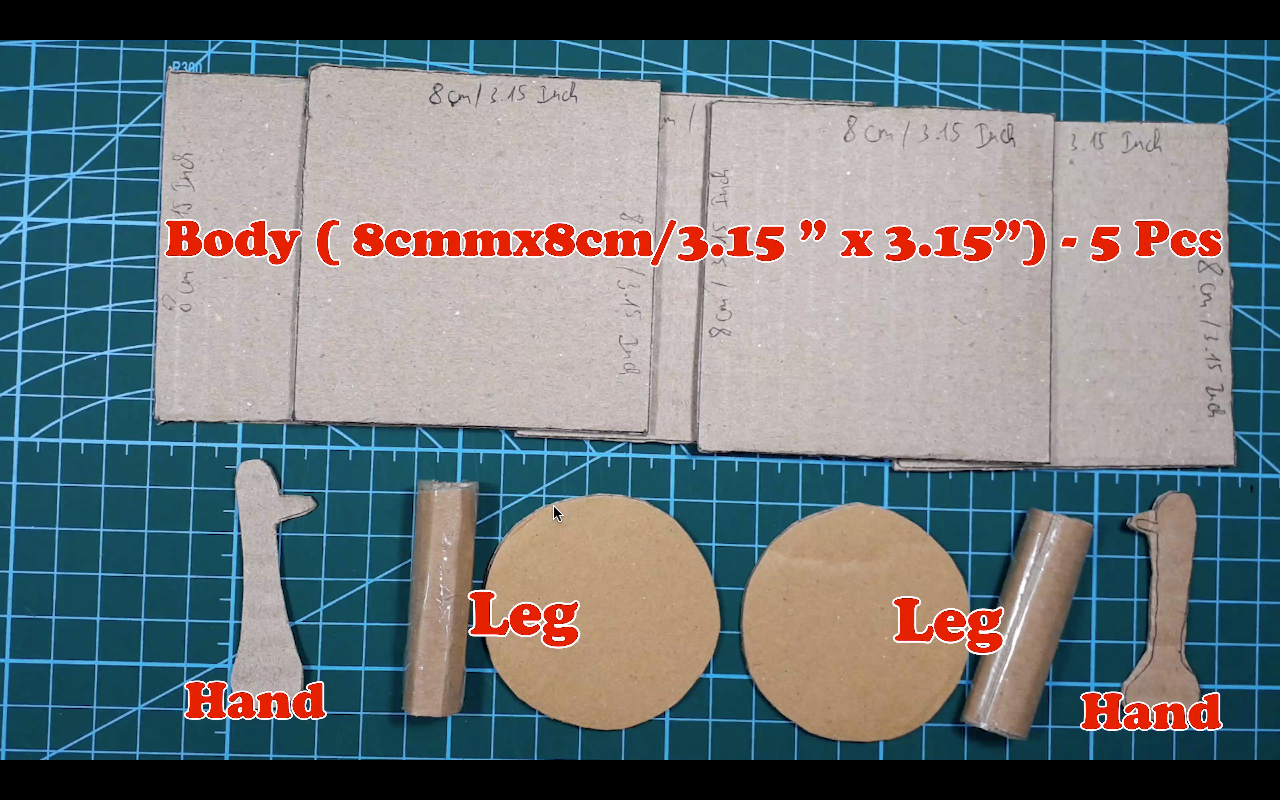
Crear cuerpo
Estoy usando cartón para hacer el cuerpo del robot
Usando pegamento caliente para conectar todas las partes
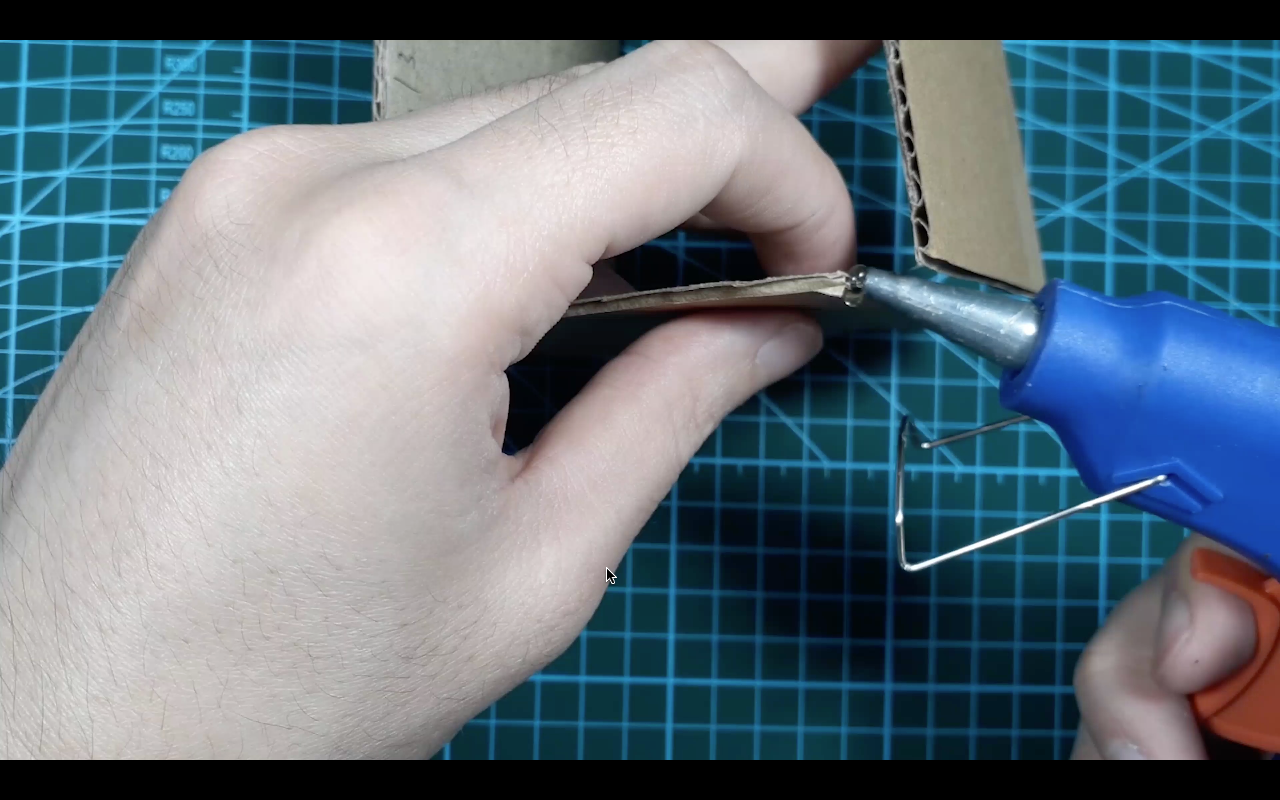
La mayor parte del cuerpo hecho

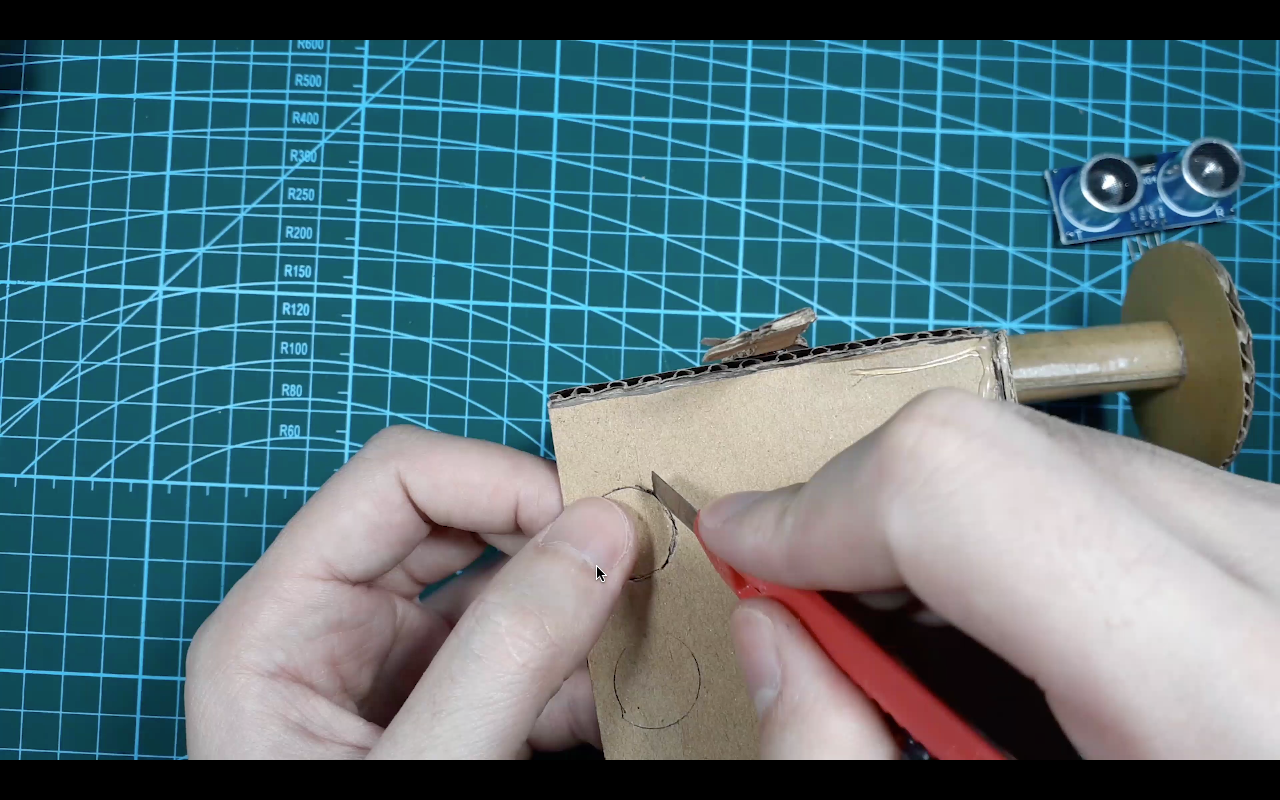
Haz agujeros para los ojos
Hacer boca
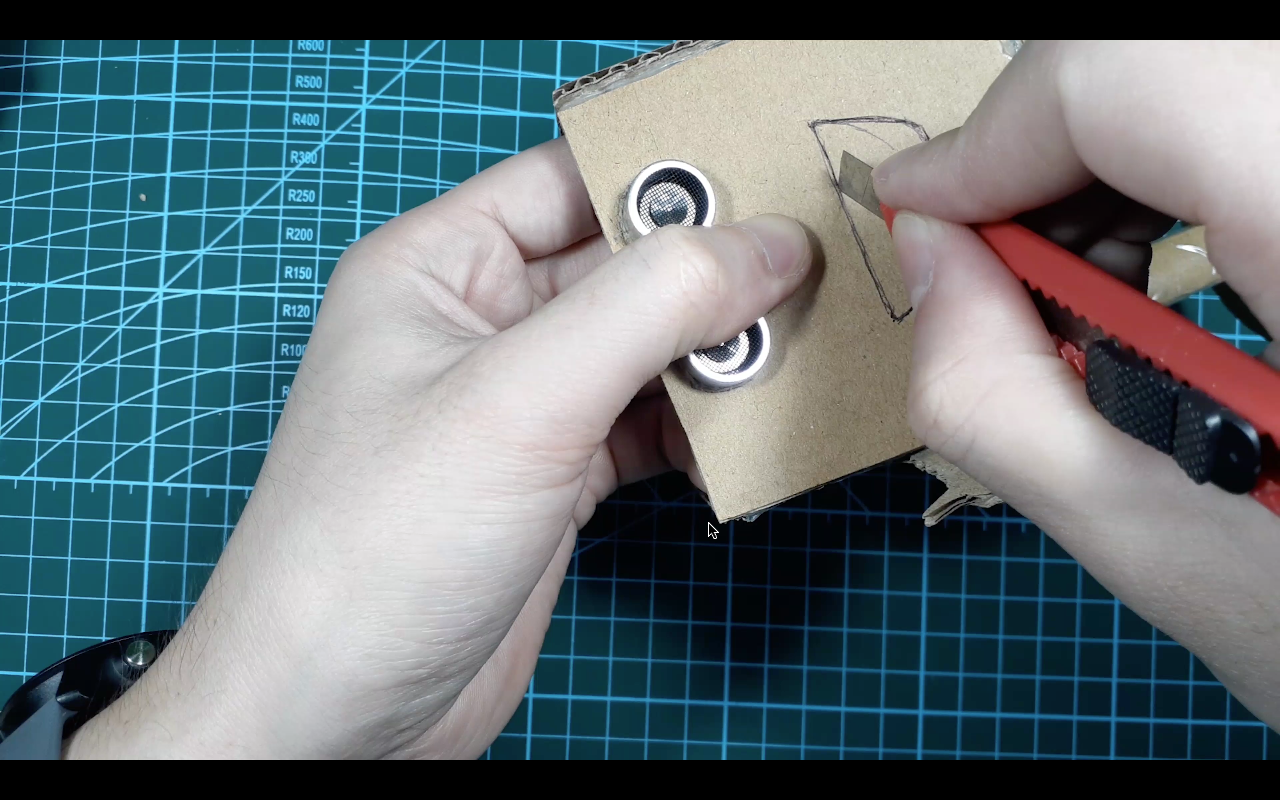
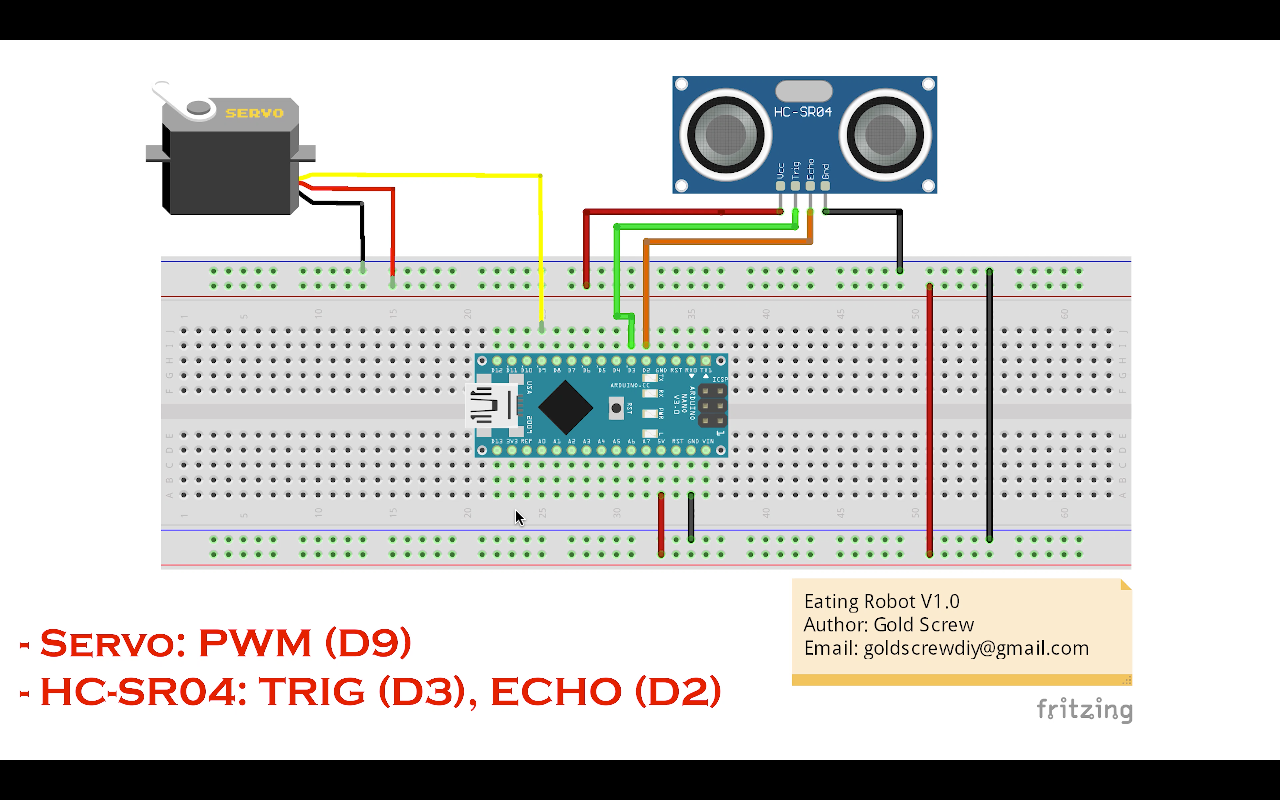
Diagrama de conexión de componentes / piezas
Conecte la alimentación USB
Prueba y depuración
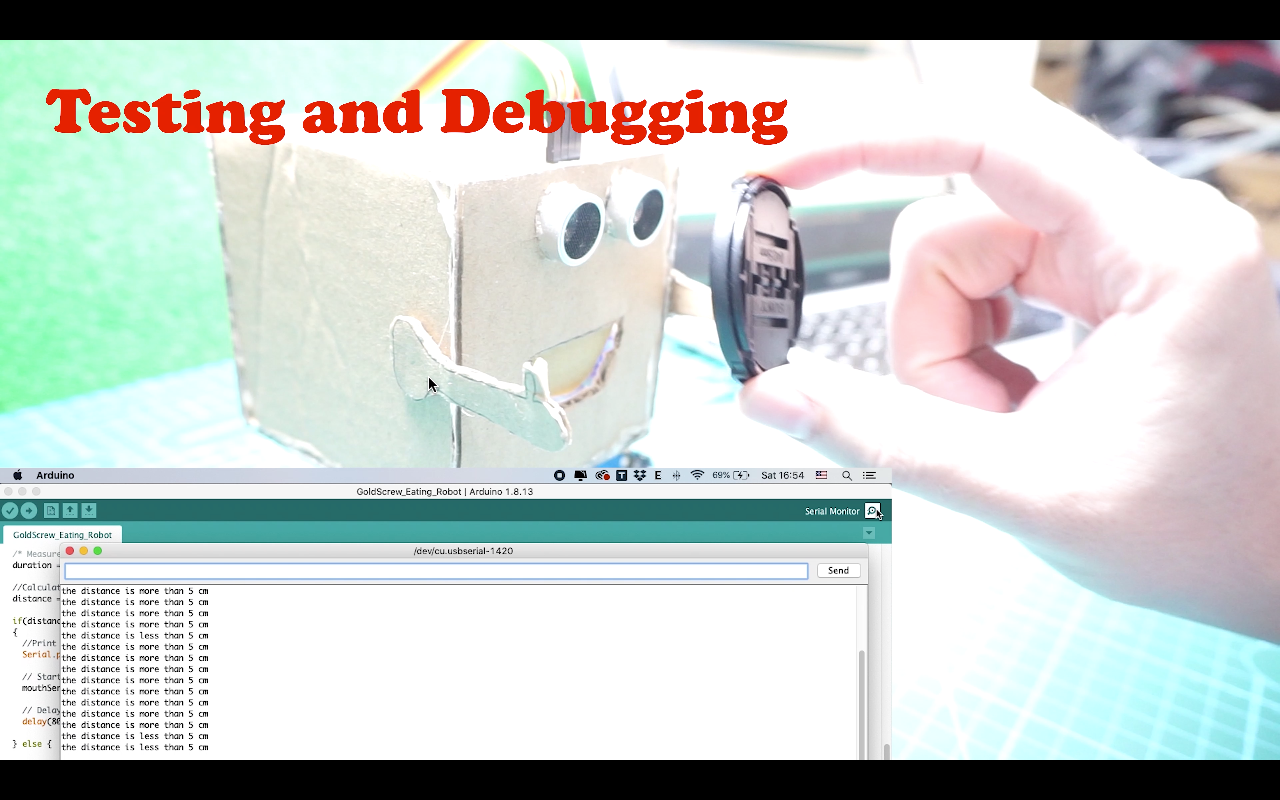
¡Está hecho!

Código
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.ino Arduino
/ * * Robot come cartoncillo * Autor:GoldScrew * Correo electrónico:[email protected] * Descripción:Está usando HC-SR04 (Detecta comida por distancia <=5 cm) y Servidor (para abrir y cerrar la boca) * / #include#define SERVO_PIN 9 // Establecer el pin 9 para el servo // Sensor ultrasónico HC-SR04const int trig =3; // trig de HC-SR04const int echo =2; // eco de HC-SR04 // ServoServo mouthServo; void setup () {// Conexión serial con baudrate 960 Serial.begin (9600); // Enviar señal con TRIG pinMode (trig, OUTPUT); // Recibir señal con ECHO pinMode (echo, INPUT); // Servidor de boca mouthServo.attach (SERVO_PIN); mouthServo.write (90); } bucle void () {/ * Duración * / larga duración sin firmar; int distancia; // Distancia / * Enviar señal desde el pin TRIG * / digitalWrite (trig, 0); // Detener el pin de disparo delayMicroseconds (2); // Retraso 2 microsegundos digitalWrite (trig, 1); // Enviar señal desde el pin TRIG delayMicroseconds (10); // Retraso 10 microsegundos digitalWrite (trig, 0); // Detener el pin de activación / * Medir el ancho de pulso ALTO en el pin ECHO * / duration =pulseIn (echo, HIGH); // Calcula la distancia distancia =int (duración / 2 / 29.412); if (distancia <=5) {// Distancia de impresión Serial.println ("la distancia es inferior a 5 cm"); // Iniciar boca abierta mouthServo.write (0); // Retraso de retardo (1200); } else {// Distancia de impresión Serial.println ("la distancia es más de 5 cm"); // Cerrar la boca mouthServo.write (90); } // Delay delay (200);}
Esquemas
Proceso de manufactura
- Juego de giroscopio Arduino con MPU-6050
- Unopad - Controlador MIDI Arduino con Ableton
- Obstáculos que evitan el robot con servomotor
- Sensor de obstáculos simple con Arduino
- Arduino Nano:Controla 2 motores paso a paso con joystick
- Robot de piano controlado por Arduino:PiBot
- Contador Geiger de mano con Arduino Nano
- Cómo hacer música con un Arduino
- Cómo hacer una apertura automática de puerta basada en Arduino
- Controla el brazo del robot Arduino con la aplicación de Android
- Robot de 4 ruedas hecho con Arduino controlado usando Dabble