


Controlador de brazo robótico MK2 Plus
Componentes y suministros
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 3 |
Herramientas y máquinas necesarias
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
El brazo EEZYBOT MK2
Si ha buscado en thingiverse.com brazos robóticos geniales, es probable que se haya topado con esto. El brazo EEZYBOT MK2 (diseñado por el brillante daghizmo) comparte el enlace cinemático del ABB IRB460 reducido con una relación de 1:7. Sin embargo, este brazo está diseñado para funcionar con servos, lo que lo hace un poco inestable y menos elegante. Sin embargo, existe una solución mejor. El brazo MK2 Plus que se encuentra aquí, https://www.thingiverse.com/thing:2520572 es una versión remezclada del brazo MK2 original que usa 3 motores paso a paso para mover sus enlaces.

Imprimir esto lleva un tiempo, así que marque este artículo como favorito, imprima todo y vuelva cuando haya terminado. (Tardará unos días)
Si tiene problemas para ensamblar el brazo, hay muchos tutoriales en línea.
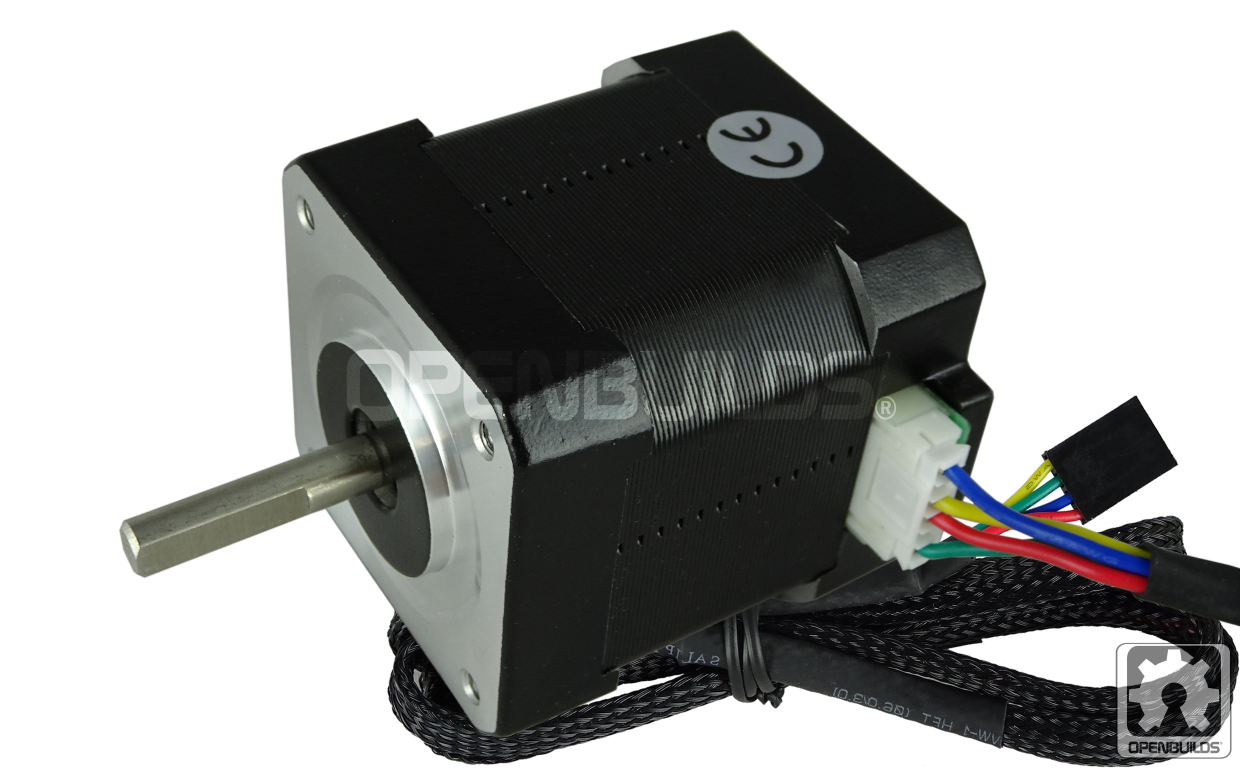
Selección de una posición inicial
A diferencia de los servos, los motores paso a paso no tienen conciencia de posición. Tendremos que remediar esto configurando primero una rutina de inicio cuando el brazo esté encendido. Usaremos 3 interruptores de límite para establecer nuestra posición inicial. Los enlaces funcionan de una manera algo compleja, pero comprenderá fácilmente dónde colocar los interruptores una vez que ensamble el brazo y vea cómo se mueve todo.
(es decir, no hay XY como un sistema cartesiano, pero los llamaremos así de todos modos para facilitar las cosas)
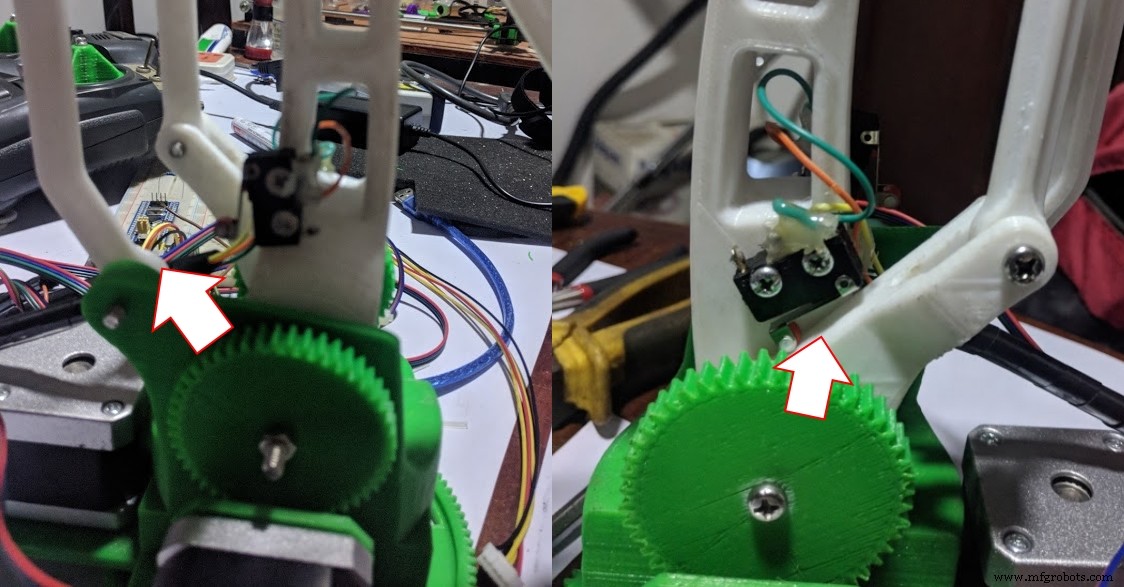
Puede configurar el interruptor de límite Z en cualquier lugar de la base principal del brazo. Agrega un poco de pegamento termofusible para que los cables no se salgan cuando el brazo se mueva.
Cableado
El cableado es bastante sencillo, ya que todos los terminales están marcados en el escudo del CNC. ¡Simplemente no conecte sus controladores A4988 de manera incorrecta! El motor paso a paso en el lado con el interruptor de límite Y debe enchufarse al terminal para el motor paso a paso Y en su escudo CNC. Lo mismo ocurre con el motor en el lado del interruptor de límite X. (Los llamamos X e Y, ya que es más fácil lidiar con el blindaje del CNC de esta manera). Conecte el paso a paso final que gira la base del brazo al terminal Z y cablee los topes finales de acuerdo con sus nombres. La polaridad no importa.
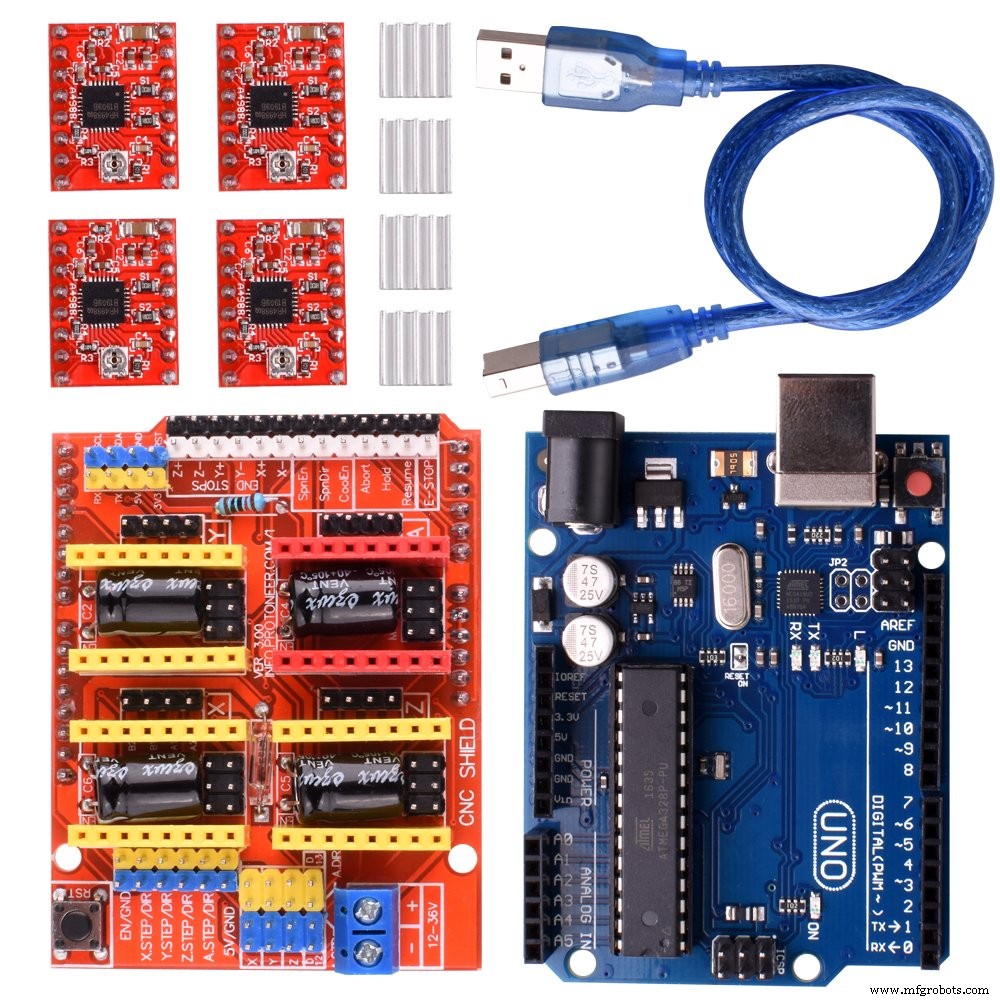
Encuentre una fuente de alimentación de 12 V decente que pueda proporcionar la corriente para que los motores funcionen sin detenerse.
Código
Vamos a ir al grano. Usaremos la biblioteca AccelStepper para Arduino para manejar los steppers sin problemas. Esta biblioteca le permite acelerar, desacelerar y ejecutar fácilmente varios motores paso a paso simultáneamente. Puede obtener esta biblioteca directamente a través del IDE de Arduino utilizando el Administrador de bibliotecas (Sketch> Incluir biblioteca> Administrador de bibliotecas)
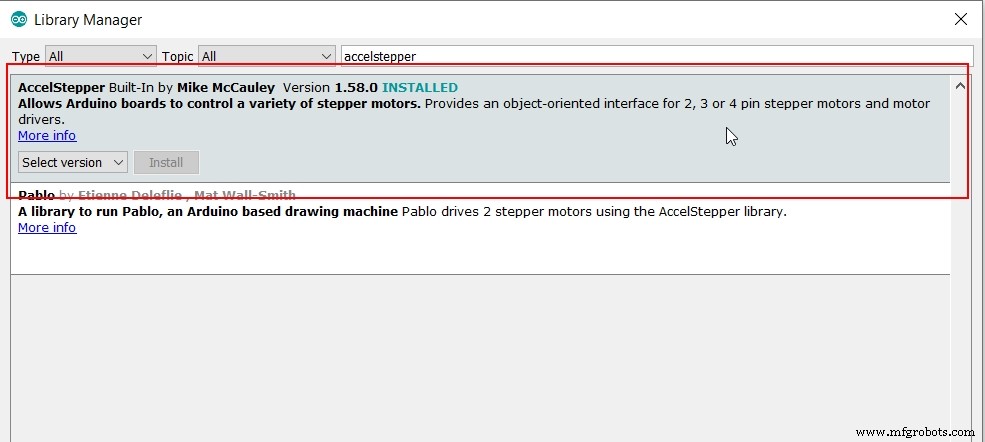
También puede obtenerlo en la página de creadores originales en airspayce. https://www.airspayce.com/mikem/arduino/AccelStepper/
Ahora que tenemos todo lo que necesitamos, repasemos el código paso a paso.
Primero definiremos algunos nombres para los pines que vamos a usar. Puede encontrar un diagrama de pines del escudo CNC con una búsqueda rápida de imágenes en Google. También crearemos los objetos AccelStepper para nuestros 3 motores paso a paso.
#define XSTEP 2 // Pin de paso del motor paso a paso
#define YSTEP 3
#define ZSTEP 4
#define XDIR 5 // Pin de control de dirección del motor paso a paso
#define YDIR 6
#define ZDIR 7
#define ENABLE 8 // Pin de habilitación del blindaje del CNC
#define XLIMIT 9 // Pines del interruptor de límite
#define YLIMIT 10
# define ZLIMIT 11
#define XMOTORACC 250 // Valores de aceleración y velocidad máxima
#define XMOTORMAXSPEED 1000
#define YMOTORACC 250
#define YMOTORMAXSPEED 1000
# incluir
AccelStepper XMOTOR (1, XSTEP, XDIR);
AccelStepper YMOTOR (1, YSTEP, YDIR);
AccelStepper ZMOTOR (1, ZSTEP, ZDIR); Hagamos una pequeña función de ayuda para configurar nuestros pines.
void pinsetup () {
pinMode (ENABLE, OUTPUT);
digitalWrite (ENABLE, LOW);
pinMode (XLIMIT, INPUT_PULLUP);
pinMode ( YLIMIT, INPUT_PULLUP);
pinMode (ZLIMIT, INPUT_PULLUP);
} Ahora que está hecho, repasemos la lógica de nuestra rutina de búsqueda.
void autohome () {// Estamos usando esto para llamar a nuestra rutina de inicio
xyhome ();
zhome ();
}
void xyhome () {
int initial_xhome =-1;
int initial_yhome =-1;
// Establezca la velocidad máxima y la aceleración de cada paso a paso al inicio para el inicio
XMOTOR.setMaxSpeed (500.0 ); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
XMOTOR.setAcceleration (50.0); // Establecer la aceleración de Stepper
YMOTOR.setMaxSpeed (500.0); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
YMOTOR.setAcceleration (50.0); // Establecer la aceleración del motor paso a paso
// Iniciar el procedimiento de inicio del motor paso a paso al inicio
while (digitalRead (YLIMIT)) {// Hacer que el paso a paso se mueva en sentido antihorario hasta que se active el interruptor
XMOTOR. moveTo (initial_xhome); // Establece la posición para mover a
YMOTOR.moveTo (initial_yhome); // Establece la posición para mover a
initial_xhome--; // Disminuir en 1 para el siguiente movimiento si es necesario
initial_yhome--;
XMOTOR.run (); // Empiece a mover el paso a paso
YMOTOR.run ();
delay (5);
}
XMOTOR.setCurrentPosition (0); // Establece la posición actual como cero por ahora
YMOTOR.setCurrentPosition (0);
initial_xhome =-1;
initial_yhome =1;
while (digitalRead (XLIMIT)) {
XMOTOR.moveTo (initial_xhome); // Establece la posición para mover a
YMOTOR.moveTo (initial_yhome); // Establece la posición para mover a
initial_xhome--; // Disminuir en 1 para el siguiente movimiento si es necesario
initial_yhome ++;
XMOTOR.run (); // Empiece a mover el paso a paso
YMOTOR.run ();
delay (5);
}
YMOTOR.setCurrentPosition (0); // Establecer la posición actual como cero por ahora
YMOTOR.setMaxSpeed (250.0); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
YMOTOR.setAcceleration (10.0); // Establecer la aceleración de Stepper
initial_yhome =1;
while (! DigitalRead (YLIMIT)) {// Hacer que el Stepper se mueva CW hasta que se desactive el interruptor
YMOTOR.moveTo (initial_yhome);
YMOTOR.run ();
initial_yhome ++;
delay (5);
}
YMOTOR.setCurrentPosition (0);
YMOTOR.setMaxSpeed (YMOTORMAXSPEED ); // Establecer la velocidad máxima de paso a paso (más rápido para movimientos regulares)
YMOTOR.setAcceleration (YMOTORACC); // Establecer la aceleración de Stepper
XMOTOR.setCurrentPosition (0); // Establecer la posición actual como cero por ahora
XMOTOR.setMaxSpeed (250.0); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
XMOTOR.setAcceleration (10.0); // Establecer la aceleración de Stepper
initial_xhome =1;
while (! DigitalRead (XLIMIT)) {// Hacer que el Stepper se mueva CW hasta que se desactive el interruptor
XMOTOR.moveTo (initial_xhome);
XMOTOR.run ();
initial_xhome ++;
delay (5);
}
XMOTOR.setCurrentPosition (0);
XMOTOR.setMaxSpeed (XMOTORMAXSPEED ); // Establecer la velocidad máxima de paso a paso (más rápido para movimientos regulares)
XMOTOR.setAcceleration (XMOTORACC); // Establecer la aceleración de Stepper
}
void zhome () {
int initial_zhome =-1;
// Establecer la velocidad máxima y la aceleración de cada Stepper al inicio para el inicio
ZMOTOR.setMaxSpeed (100.0); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
ZMOTOR.setAcceleration (100.0); // Establecer la aceleración del motor paso a paso
// Iniciar el procedimiento de inicio del motor paso a paso al inicio
while (digitalRead (ZLIMIT)) {// Hacer que el paso a paso se mueva en sentido antihorario hasta que se active el interruptor
ZMOTOR. moveTo (initial_zhome); // Establece la posición para mover a
initial_zhome--; // Disminuir en 1 para el próximo movimiento si es necesario
ZMOTOR.run (); // Empiece a mover el paso a paso
delay (5);
}
ZMOTOR.setCurrentPosition (0); // Establecer la posición actual como cero por ahora
ZMOTOR.setMaxSpeed (50.0); // Establece la velocidad máxima de paso a paso (más lenta para obtener una mejor precisión)
ZMOTOR.setAcceleration (50.0); // Establecer la aceleración de Stepper
initial_zhome =1;
while (! DigitalRead (ZLIMIT)) {// Hacer que el Stepper se mueva CW hasta que se desactive el interruptor
ZMOTOR.moveTo (initial_zhome);
ZMOTOR.run ();
initial_zhome ++;
delay (5);
}
ZMOTOR.setCurrentPosition (0);
ZMOTOR.setMaxSpeed (1000.0 ); // Establecer la velocidad máxima de Stepper (más rápido para movimientos regulares)
ZMOTOR.setAcceleration (1000.0); // Establecer la aceleración de Stepper
} Bien, eso es mucho código. ¿Qué está pasando realmente aquí? El brazo primero realiza una rutina de referencia en los motores X e Y. Debido a la forma en que funcionan los vínculos, esto se hace en unos pocos pasos. (Puede ver el video al final para ver esto en acción)
- Primero, los motores X e Y se mueven en direcciones opuestas para que el interruptor de límite Y se presione primero.
- Tan pronto como se presiona el interruptor de límite Y, ambos motores giran en la misma dirección de modo que se presiona el interruptor de límite X.
- Después de presionar el interruptor X, los motores se mueven un poco para que los interruptores se presionen (presionados como en, no el triste un poco presionado).
- Finalmente, el motor Z se gira de manera que se presiona el interruptor de límite Z.
Deberá tener mucho cuidado al realizar el procedimiento de inicio por primera vez. Si sus motores paso a paso se mueven hacia el otro lado, simplemente APAGUE LA CORRIENTE y LUEGO gire el conector del motor.
Ahora que está hecho, llame a autohome () desde su función setup () para que solo se ejecute una vez. Deje su bucle () en blanco. Y mantenga una mano sobre la fuente de alimentación para apagarla si algo sale mal.
void setup () {
// ponga su código de configuración aquí, para que se ejecute una vez:
Serial.begin (9600);
pinsetup ();
autohome ();
Serial.println ("HOMING OK");
} Si tiene suerte, sus motores girarán en la dirección correcta, los interruptores de límite harán clic correctamente y la rutina de inicio funcionará sin ningún problema. Pero si eres como yo, tendrás que hacer pequeños cambios antes de que todo esté listo y funcionando. Por lo tanto, desconecte siempre la alimentación si el inicio no funciona correctamente para no estropear su brazo impreso en 3D.
Finalmente, puede escribir su propia lógica en el bucle () para que su brazo se mueva a las posiciones que desee. Debido a la forma en que está vinculado el brazo, los motores X e Y controlan el efector final de una manera casi cartesiana.
void loop () {
XMOTOR.runToNewPosition (100);
delay (1000);
YMOTOR.runToNewPosition (50);
delay (1000);
YMOTOR.runToNewPosition (-50);
delay (1000);
YMOTOR.runToNewPosition (0);
delay (1000);
XMOTOR.runToNewPosition ( 0);
retraso (1000);
}
Conclusión
He visto muchos tutoriales sobre cómo usar el popular firmware GRBL para controlar este brazo. Sin embargo, esto significa que necesita una computadora para enviar comandos en serie al brazo para que se mueva. Si solo necesita que el brazo MK2 haga unos pocos movimientos, puede codificarlos fácilmente en el Arduino y dejar que haga lo suyo.
¡Eso no significa que no puedas controlar esto con comandos en serie! Simplemente puede incorporar un código delimitador de serie en este y enviar los pasos del motor XY y Z como una cadena (delimitada con caracteres especiales, por ejemplo, 5, 6, 7 * que movería el motor X en 5 pasos, el Y en 6 y la Z por 7. El * se usa para indicar el final de la cadena).
También puede desarrollar esto aún más para enviar las coordenadas espaciales 3D del efector final y hacer que el arduino descubra los pasos requeridos usando cinemática inversa, o incluso trigonometría básica.
¡Divertirse! ¡Y mi más sincero agradecimiento a todos los brillantes diseñadores de Thingiverse!
Código
- robotArm
robotArm Arduino
Extraiga los archivos y ábralos con Arduino IDESin vista previa (solo descarga).
Controlador de brazo robótico MK2 - Github
Enlace al repositorio de github https://github.com/yasaspeiris/MK2-Robot-Arm-ControllerPiezas y carcasas personalizadas
Robot Arm MK2 Plus en Thingiverse
Créditos para un archivo CAD de ackyltle en thingiverse.comProceso de manufactura
- El controlador del motor integra el núcleo Arm Cortex-M0
- Robot SCARA de doble brazo
- Brazo robótico MeArm - Su robot - V1.0
- Brazo robótico controlado a través de Ethernet
- Littlearm 2C:Construya un brazo robótico Arduino impreso en 3D
- Brazo de robot Arduino DIY:controlado por gestos con las manos
- Controla el brazo del robot Arduino con la aplicación de Android
- Controlador de joystick para el robot MeArm - Grabación de coordenadas
- Realtime Robotics presenta una nueva computadora controladora de robots
- Centro de torneado equipado con brazo robótico
- Robot combina brazo robótico colaborativo con plataforma móvil