


Contador de RPM basado en Arduino con un algoritmo nuevo y más rápido
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Herramientas y máquinas necesarias
 |
| |||
 |
|
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Este proyecto se desarrolla a partir de cero como un intento de medir las RPM exactas (Rotaciones por Minuto) valor de varios motores usando un solo IR sensor, una placa Arduino y un esencial ingrediente clave:un puntero láser (necesariamente rojo).
Este proyecto utiliza el hecho de que el sensor de infrarrojos también lee el bajo número de radiaciones de infrarrojos emitidas por el láser rojo. Sin embargo, cuando se utiliza un láser azul / verde, estas radiaciones de infrarrojos son muy inferiores y el voltaje de lectura analógica desciende a aprox. 0.
Cuando una pala del ventilador unida al motor se interpone en la trayectoria del rayo láser, bloquea la trayectoria y la lectura cae a 0. La pala del ventilador sigue girando y su posición sigue cambiando con un suministro constante de energía. Se produce un cambio constante de ruta. Cuando el camino se vuelve despejado nuevamente, el rayo del puntero láser golpea el sensor nuevamente.
NUEVO CÓDIGO BASADO EN ALGORITMO DE DISPARO ÚNICO, PARA MEDIDAS ADAPTATIVAS MÁS RÁPIDAS Y MUCHO MÁS CAMBIADAS:-
El código de este proyecto que he desarrollado utiliza un algoritmo desarrollado recientemente para este proyecto. El El algoritmo es realmente único y está diseñado para realizar mediciones en menos de 40 milisegundos y ofrecer resultados precisos. Una característica muy importante de este programa es que utiliza un método que llamo Detección de disparo único para Arduino. Calcula las RPM del motor cada vez que la paleta del ventilador crea una obstrucción en la trayectoria del rayo láser. Esto se debe a que la obstrucción de la trayectoria del rayo láser marca una revolución completa 1 / n para n número de aspas en el ventilador. Entonces, el programa es muy sensible a incluso cambios mínimos en las RPM ( hasta 2 decimales) en cada 1 / n th revolución de el fan hoja otra vez dónde n es el número de cuchillas de el ventilador. Por lo tanto, este algoritmo único de detección de disparo único proporciona una precisión extrema valor de RPM y mayor sensibilidad a cambios en las medidas.
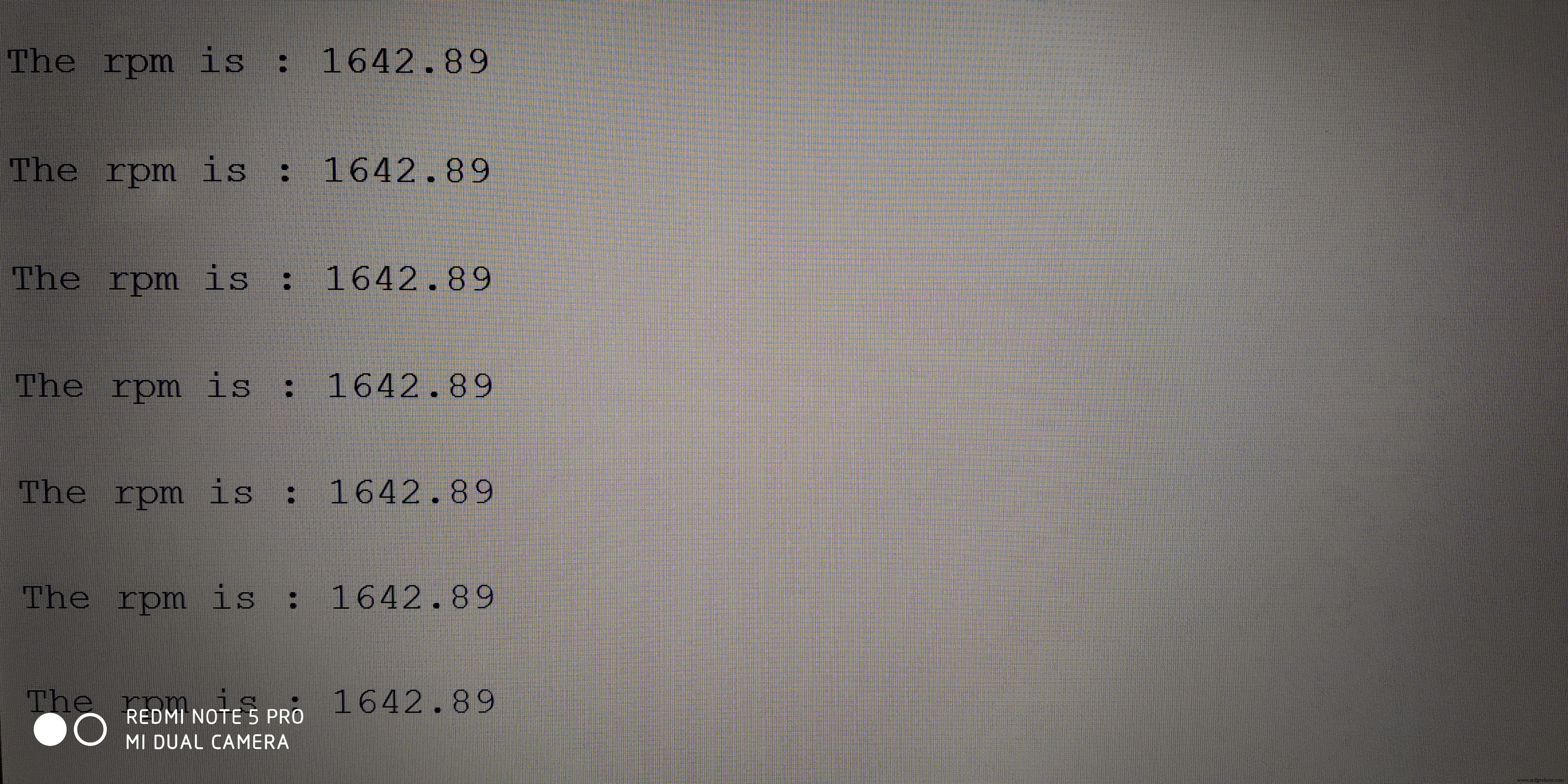
En el arriba mostrado imagen de an salida muestra de el de serie supervisar en a prueba corre, el calificar de salida cribado puede claramente ser visto cuál es acerca de 2 veces a segundo. El RPM valores son calculado hasta dos lugares de decimales cada tiempo.
Todos los que vean esto deben probar este proyecto una vez y compartir sus valiosas reseñas. Cuéntenos sobre sus experimentos y sus resultados relacionados con este algoritmo. Las sugerencias para nuevos proyectos son bienvenidas en la sección de comentarios. Si te gusta el proyecto, respétalo.
Siga mi perfil tocando este enlace (https://create.arduino.cc/projecthub/YASH36) @ YASH36 para conocer algunas actualizaciones del nuevo proyecto.
Hasta entonces, ¡manténgase seguro y disfrute de Arduino!
Código
- RPM_counter_101
RPM_counter_101 Arduino
Este es el código para el contador de RPM. // código de YaSh.int sen =A0; const float wid =0.012; // ajusta el ancho de la paleta del ventilador según tus necesidades. const float rad =0.045; // ajusta el radio del punto de detección en la pala del ventilador.const float konst =6.2832; // 2 * pi.float time_1; float time_2; float vel; float diff; float tnet; float rpm; void setup () {Serial.begin (9600); pinMode (sen, ENTRADA); Serial.print ("\ n por favor arranque el motor al menos 3 segundos antes. \ N"); delay (3000);} bucle vacío () {if (analogRead (sen) <950) {time_1 =millis (); retraso (30); } if (analogRead (sen)> 950) {time_2 =millis (); diff =(tiempo_2-tiempo_1); vel =wid / diff; // velocidad de rotación tnet =(konst * rad) / vel; // tiempo =(2 * pi * radio) / velocidad. rpm =(60000) / tnet; // tiempo en ms a minutos y luego al paso de conversión de rpm. } Serial.print ("\ n El rpm es:"); Serial.println (rpm);} Esquemas
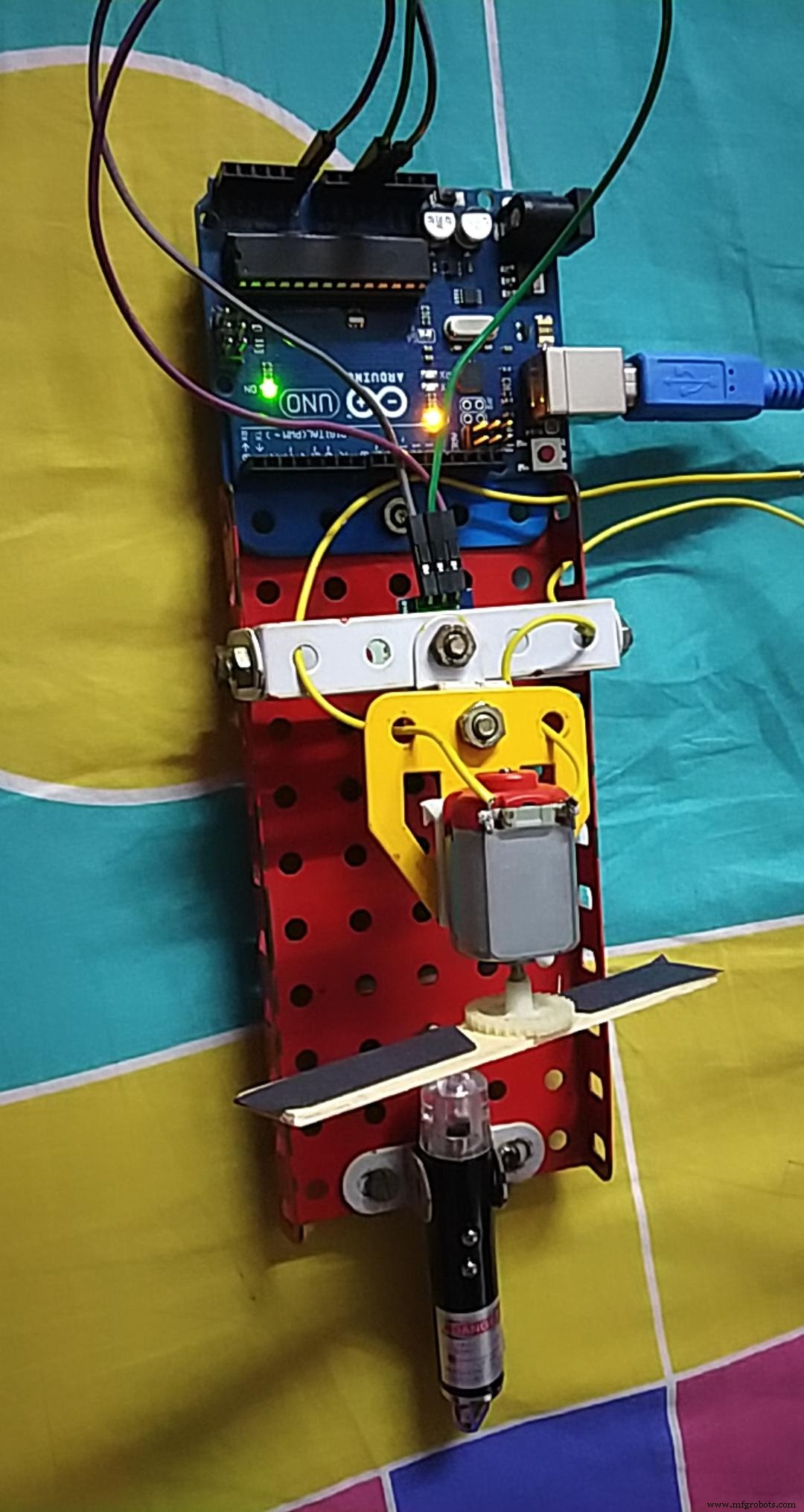
esta es la imagen para la ubicación de la base y otros componentes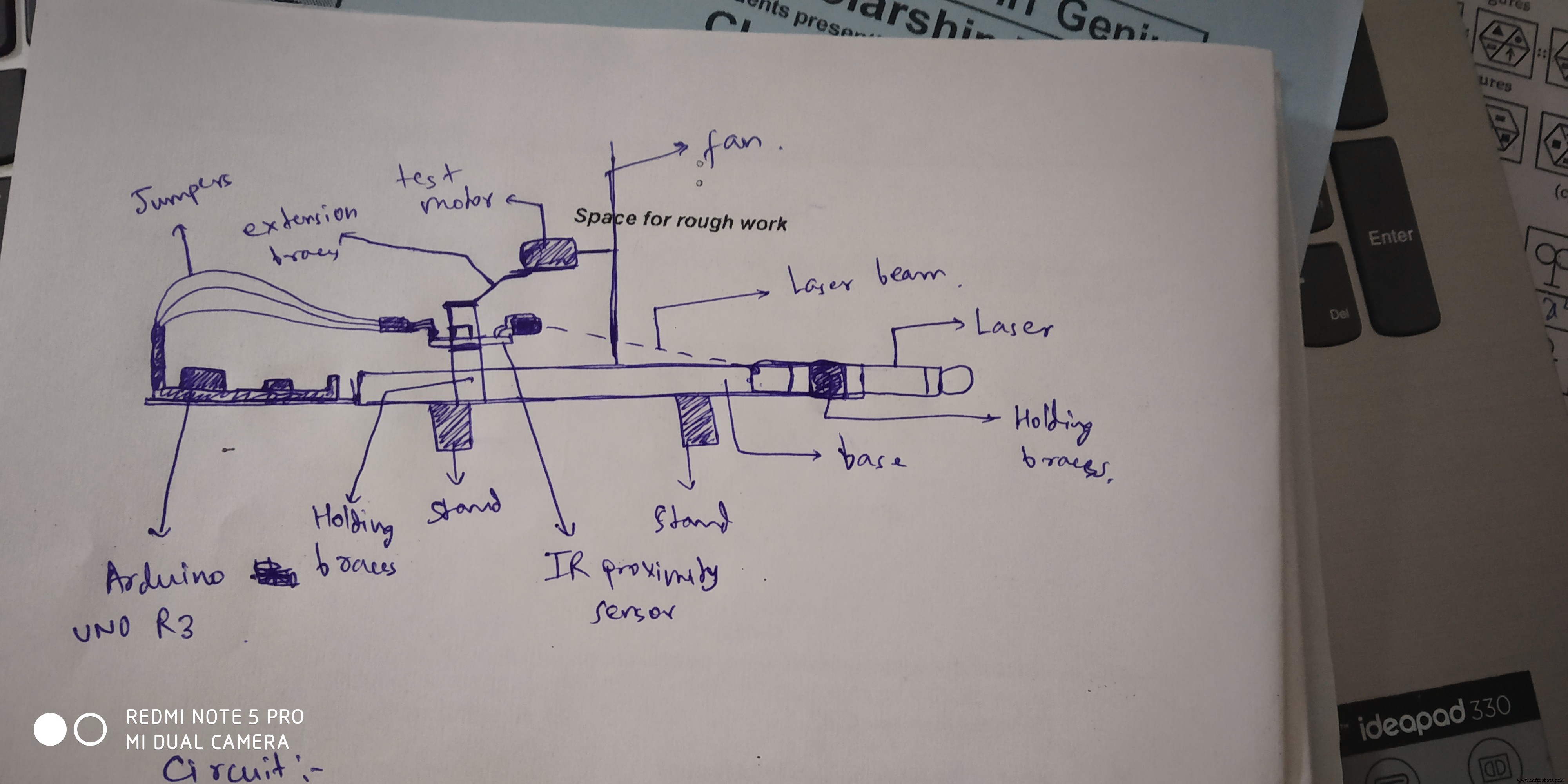 esquema para conectar el sensor a la placa arduino
esquema para conectar el sensor a la placa arduino 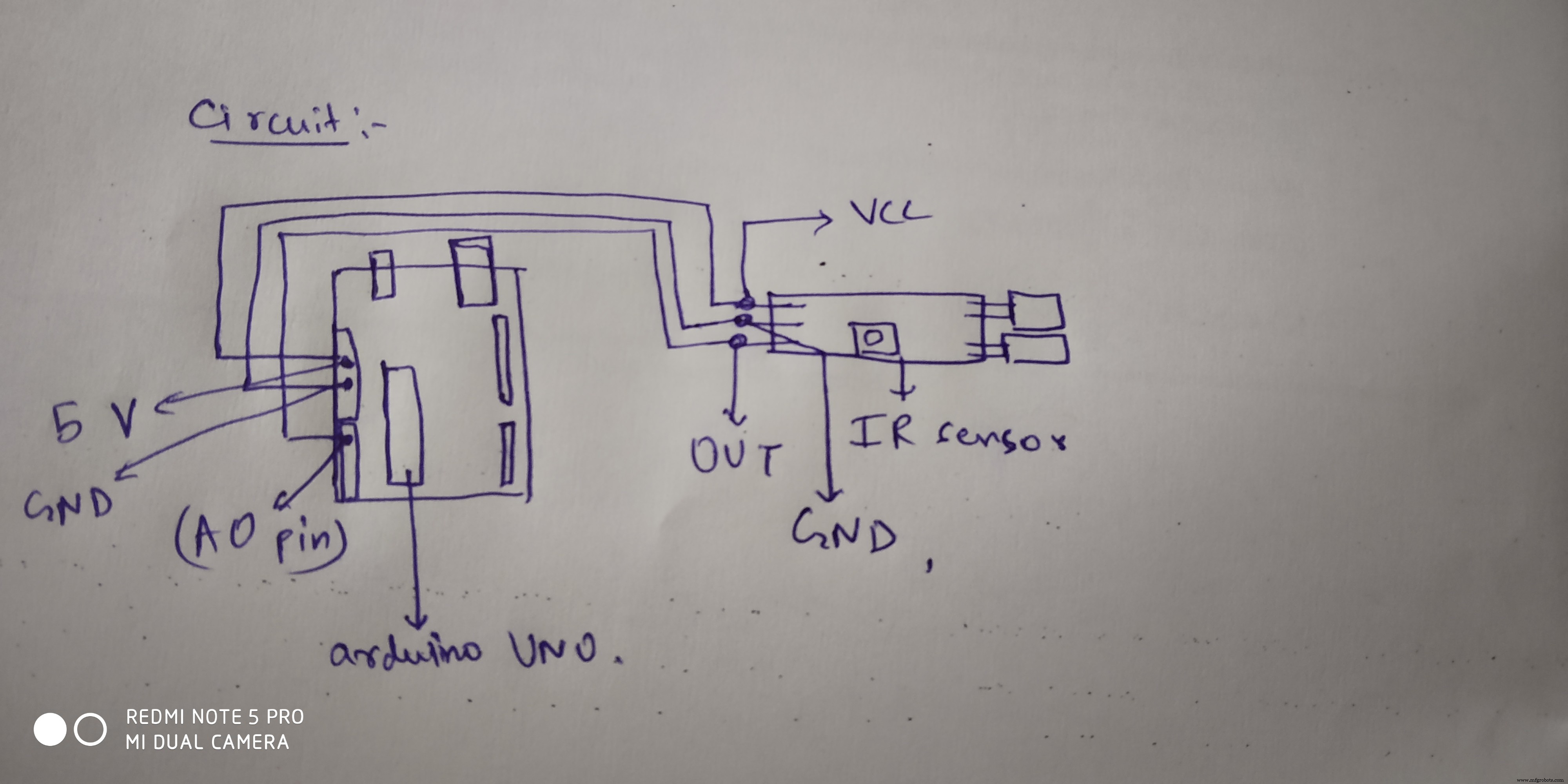
Proceso de manufactura
- Aeroponía con Raspberry Pi y sensor de humedad
- Portenta y sensor de termopar (con MAX6675)
- Juego de giroscopio Arduino con MPU-6050
- Sensor DHT11 con LED y altavoz piezoeléctrico
- Monitoreo de CO2 con sensor K30
- Unopad - Controlador MIDI Arduino con Ableton
- Registrador de datos de temperatura y humedad
- IOT - Smart Jar usando ESP8266, Arduino y sensor ultrasónico
- Sensor de obstáculos simple con Arduino
- Sensor capacitivo de huellas dactilares con Arduino o ESP8266
- Autómatas celulares basados en Arduino y OLED