


Control del servomotor con Arduino y MPU6050
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Componentes
- Arduino UNO
- MPU6050
- Servomotor MG 996R
- Cables de puente
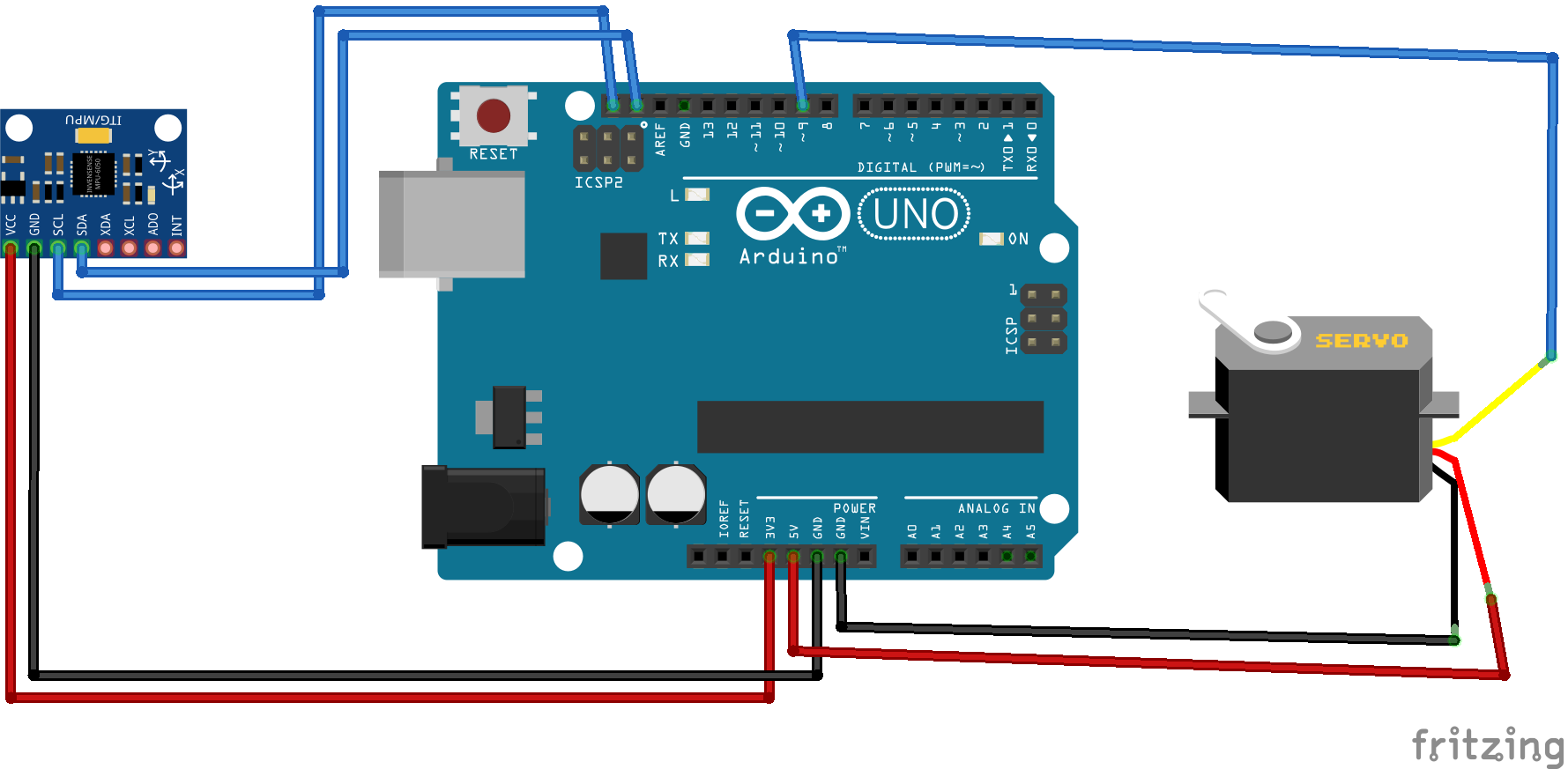
Conexiones
Verifique el diagrama adjunto para ver las conexiones
Nota:También puede conectar los pines SDA y SCL del MPU6050 al pin A4 y A5 de Arduino respectivamente.
Programación
Incluya la biblioteca adjunta en su arduino IDE, luego cargue el código en su placa Arduino.
Nota
Vea el video para una comprensión completa y suscríbase a nuestro canal para obtener más información.
Gracias.
Código
- Biblioteca MPU6050
- Código para el proyecto
Biblioteca MPU6050 C / C ++
Sin vista previa (solo descarga).
Código para el proyecto C / C ++
//hammadiqbal12@gmail.com//https://www.youtube.com/watch?v=Cvtr3LKdqvk#include// biblioteca para GYRO #include #include Servo myservo; // crea un objeto servo para controlar un servoint X =0; int Y =0; GY6050 gyro (0x68); // para guardar GYRO datavoid setup () {Wire.begin (); // inicializando GYRO gyro.initialisation (); retraso (100); myservo.attach (9);} bucle vacío () {X =map (gyro.refresh ('A', 'X'), -90, 90, 0, 180); // mapeo de los datos del giróscopo de acuerdo con la limitación de ángulo del servomotor Y =map (gyro.refresh ('A', 'Y'), -90, 90, 0, 180); myservo.write (Y); // el movimiento del eje Y controlará el retardo del servo (15);}
Esquemas
Proceso de manufactura
- Control de un efecto con sensores reales
- Sistema de asistencia que usa Arduino y RFID con Python
- Sensor DHT11 con LED y altavoz piezoeléctrico
- Arduino Temp. Monitor y reloj en tiempo real con pantalla 3.2
- Obstáculos que evitan el robot con servomotor
- Controlar un robot Roomba con Arduino y un dispositivo Android
- Control del brillo del LED usando Bolt y Arduino
- Módulo GPS u-blox LEA-6H 02 con Arduino y Python
- Reconocimiento y síntesis de voz con Arduino
- Controlar una matriz de LED con Arduino Uno
- ¿Qué es un servomotor?