


Arduino Nano:Controla 2 motores paso a paso con joystick
Componentes y suministros
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
Aplicaciones y servicios en línea
 |
| |||
 |
|
Acerca de este proyecto
Al compilar Arduino proyectos con motores paso a paso , como CNC máquina, trazador o Arte animado , llega un momento en el que los steppers deben controlarse manualmente. Joysticks analógicos son módulos baratos y fáciles de control manual, con velocidad variable. Parecen ser una buena opción para controlar los steppers . . Resolviendo el problema con el Arduino tradicional el código, sin embargo, no es trivial.
En este tutorial, te mostraré lo fácil que es programar Arduino Nano con Visuino para controlar 2 motores paso a paso con Joystick .
Paso 1:componentes
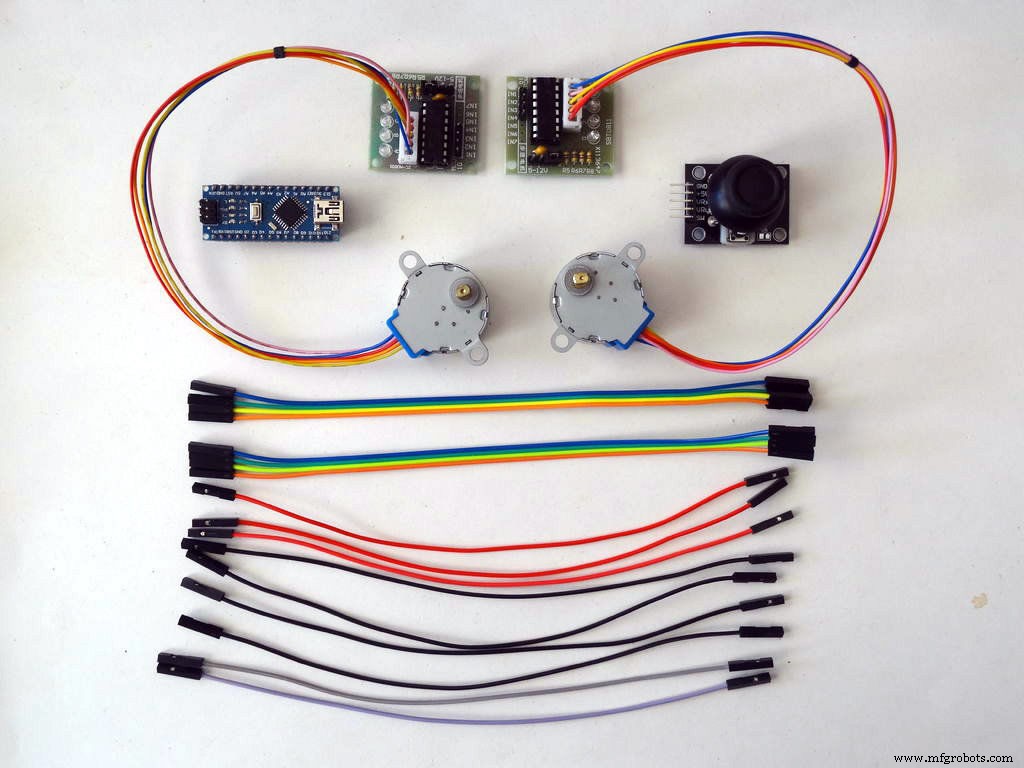
- Un Arduino placa compatible (uso Arduino Nano, porque tengo uno, pero cualquier otro estará bien)
- Un joystick que obtuve de este conjunto económico de 37 sensores
- Dos motores paso a paso de 5 V con placas de controlador (Usé el paso a paso 28BYJ-48 con placa de controlador ULN2003)
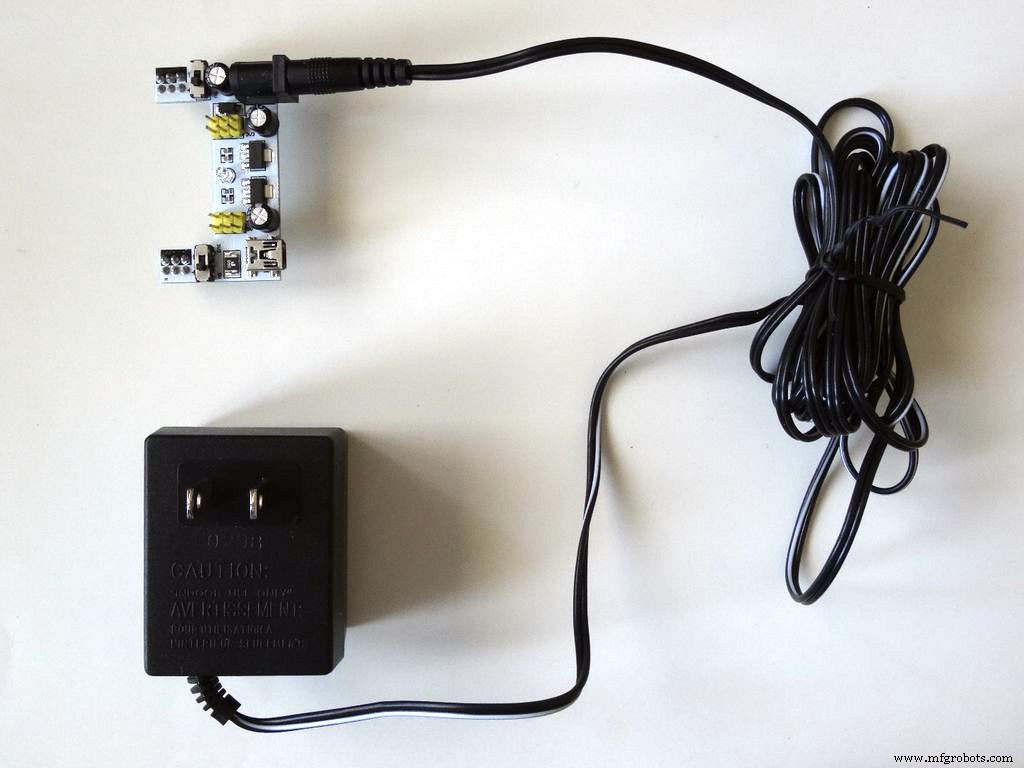
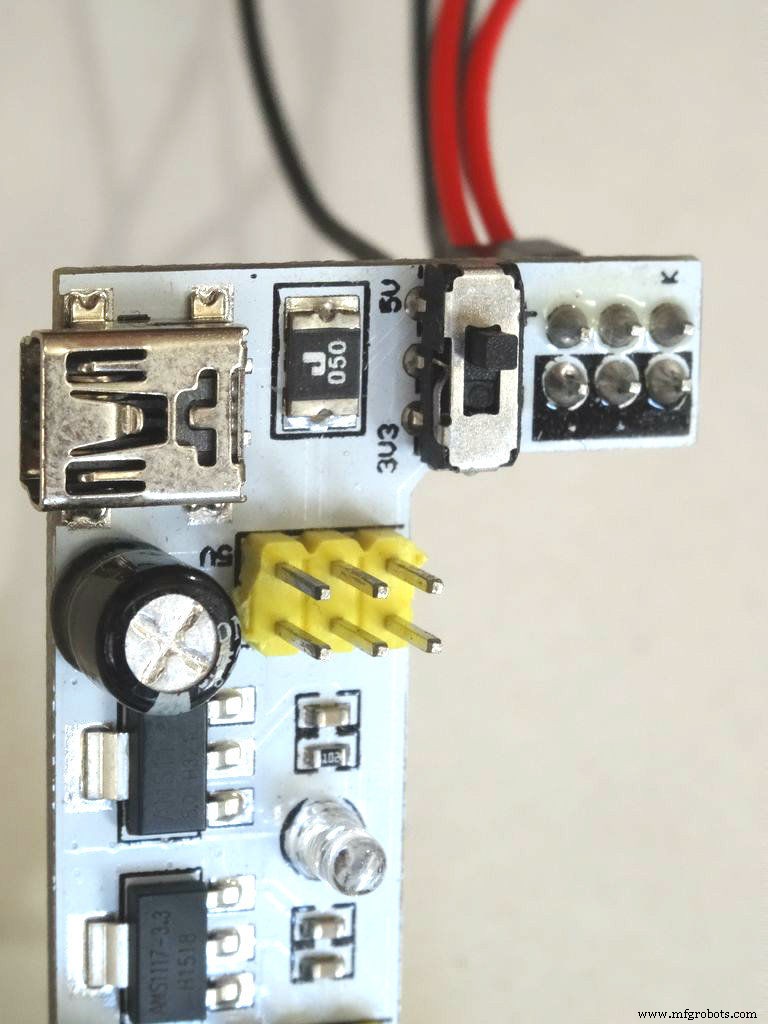
- Una fuente de alimentación para placa de pruebas K2 con adaptador ( Imagen 2 ) u otra fuente de alimentación de 5 V para los Steppers
- 17 Mujer-Mujer cables de puente
Paso 2:Conecte la alimentación y conecte a tierra los motores paso a paso
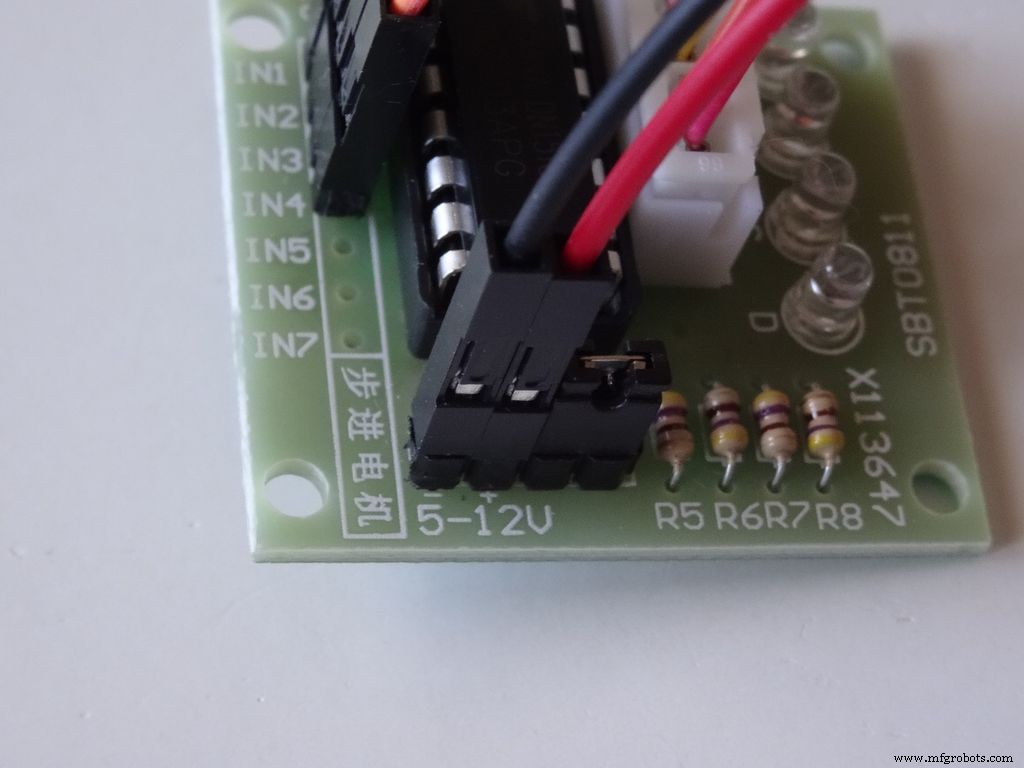

- Conectar Tierra ( Cable negro ) y Energía ( Cable rojo ), a cada uno de los módulos de controlador paso a paso ( Imagen 1 )
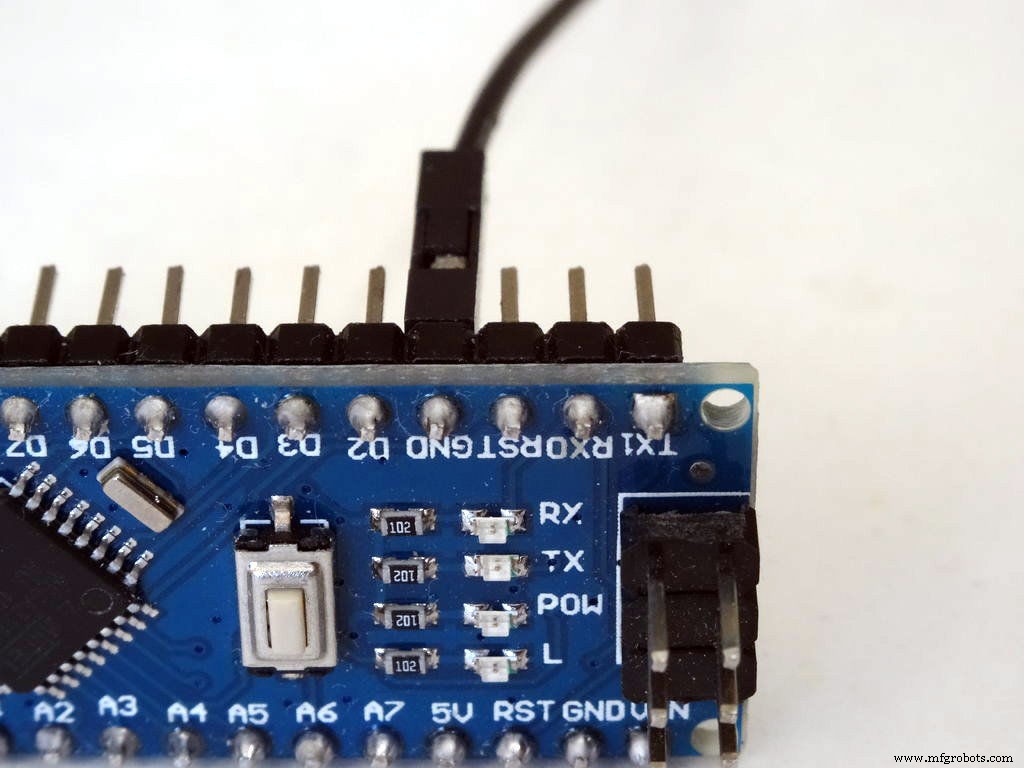
- Conecta otra Tierra ( Cable negro ) a Tierra pin del Arduino tablero ( Imagen 2 )
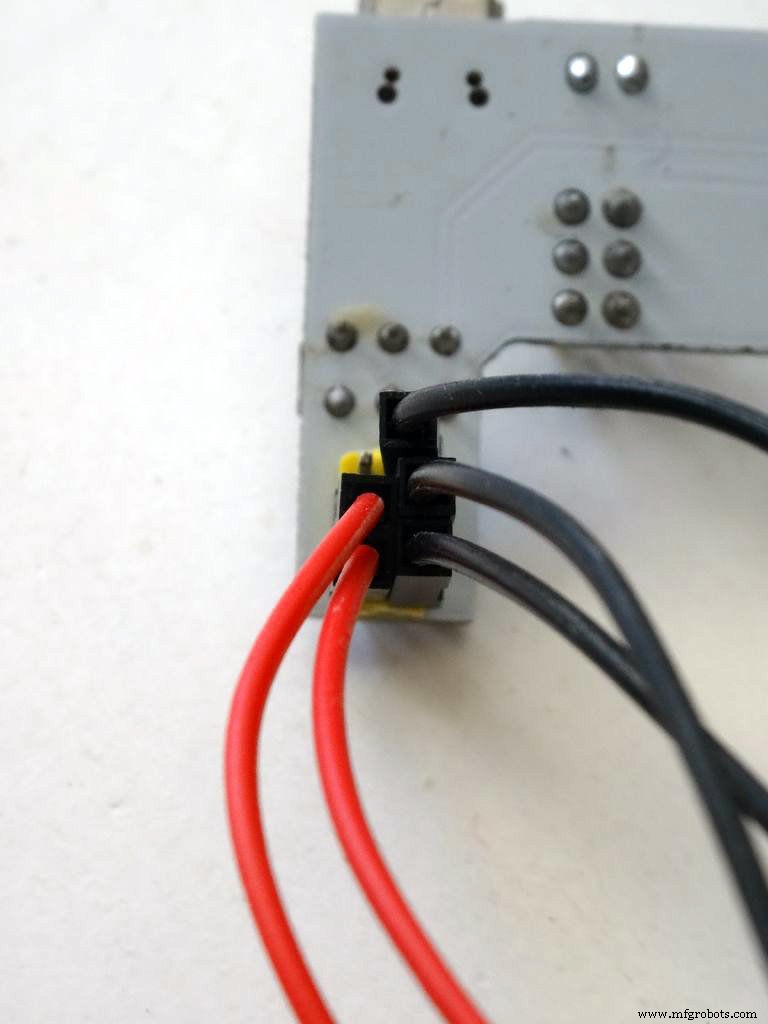
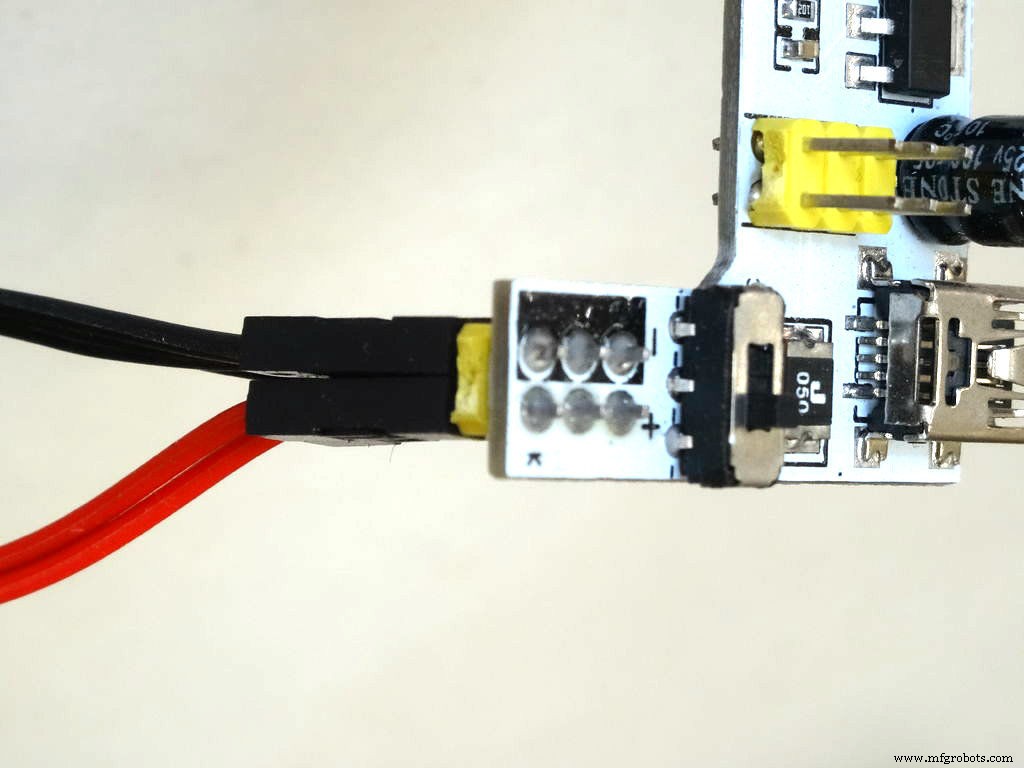
- Conecte el otro extremo del Power ( Cables rojos ) de los módulos de controlador de motor al "" Poder pines de la fuente de alimentación K2 ( Imágenes 3 y 4 )
- Conecta el otro extremo del suelo ( Cables negros ) de los módulos Motor Driver y Arduino al " - " Suelo pines de la fuente de alimentación K2 ( Imágenes 3 y 4 )
- Asegúrese de que el interruptor de selección de energía de la fuente de alimentación K2 está configurado en 5V ( Imagen 5 )
- Imagen 6 muestra dónde está el suelo pin del Arduino Nano
Paso 3:conecta los motores paso a paso al Arduino

- Si aún no está conectado, enchufe los conectores del motor paso a paso en las placas de controlador.
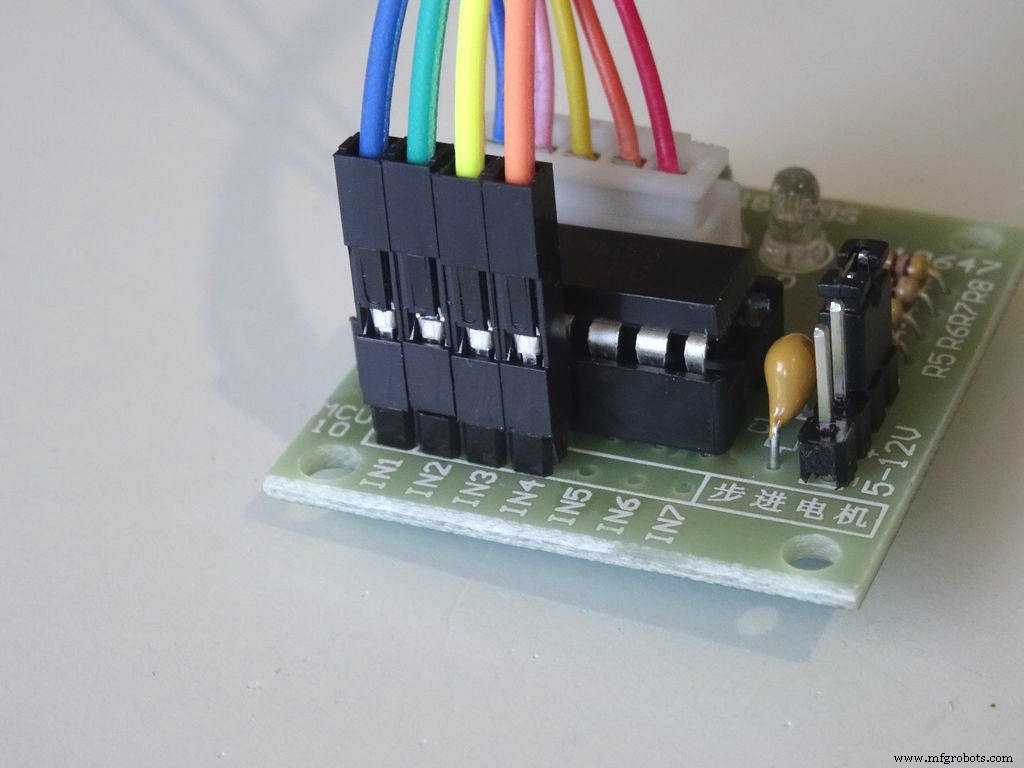
- Conecte un extremo de los cables de puente hembra-hembra ( Cables azul, verde, amarillo y naranja ) a los pines IN1 a IN4 del controlador paso a paso para el primer motor ( Imagen 1 )
- Conecte un extremo de los cables de puente hembra-hembra ( Cables azul, verde, amarillo y naranja ) a los pines IN1 a IN4 del controlador paso a paso para el segundo motor ( Imagen 1 )
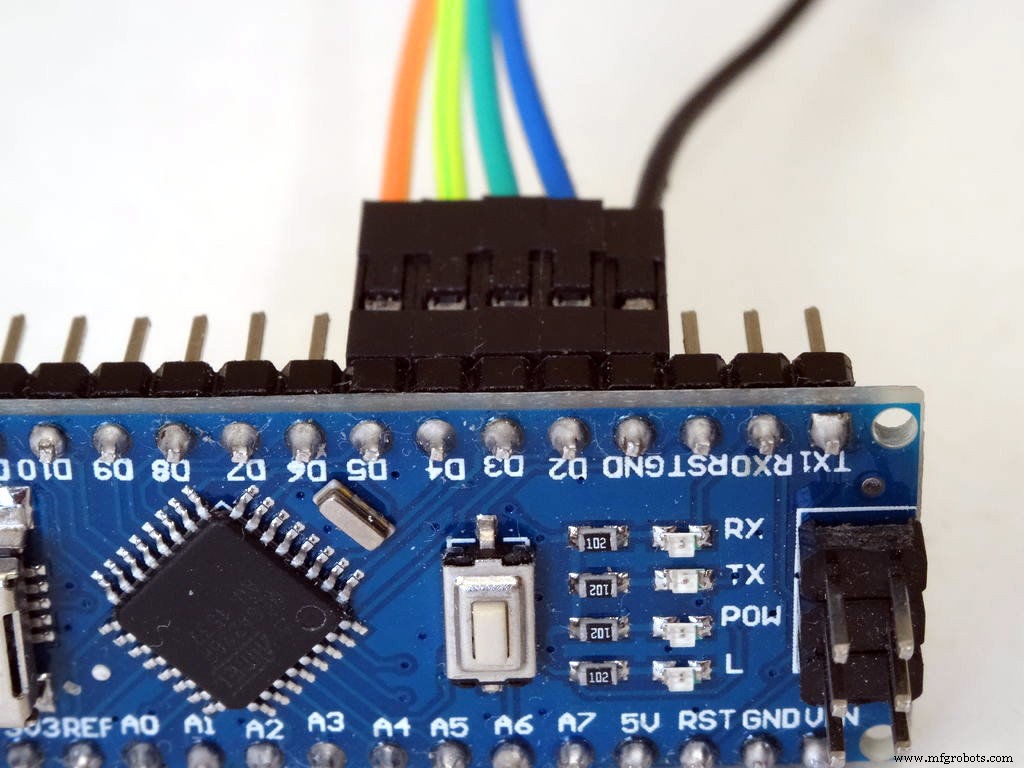
- Conecte el cable IN1 del Primer motor ( Cable azul ) al Pin digital 2 del Arduino tablero ( Imagen 2 )
- Conecte el cable IN2 del Primer motor ( Cable verde ) al Pin digital 3 del Arduino tablero ( Imagen 2 )
- Conecte el cable IN3 del Primer motor ( Cable amarillo ) al Pin digital 4 del Arduino tablero ( Imagen 2 )
- Conecte el cable IN4 del Primer motor ( Cable naranja ) al Pin digital 5 del Arduino tablero ( Imagen 2 )
- Conecte el cable IN1 del Segundo motor ( Cable azul ) al Pin digital 6 del Arduino tablero ( Imagen 3 )
- Conecte el cable IN2 del Segundo motor ( Cable verde ) al Pin digital 7 del Arduino tablero ( Imagen 3 )
- Conecte el cable IN3 del Segundo motor ( Cable amarillo ) al Pin digital 8 del Arduino tablero ( Imagen 3 )
- Conecte el cable IN4 del Segundo motor ( Cable naranja ) al Pin digital 9 del Arduino tablero ( Imagen 3 )
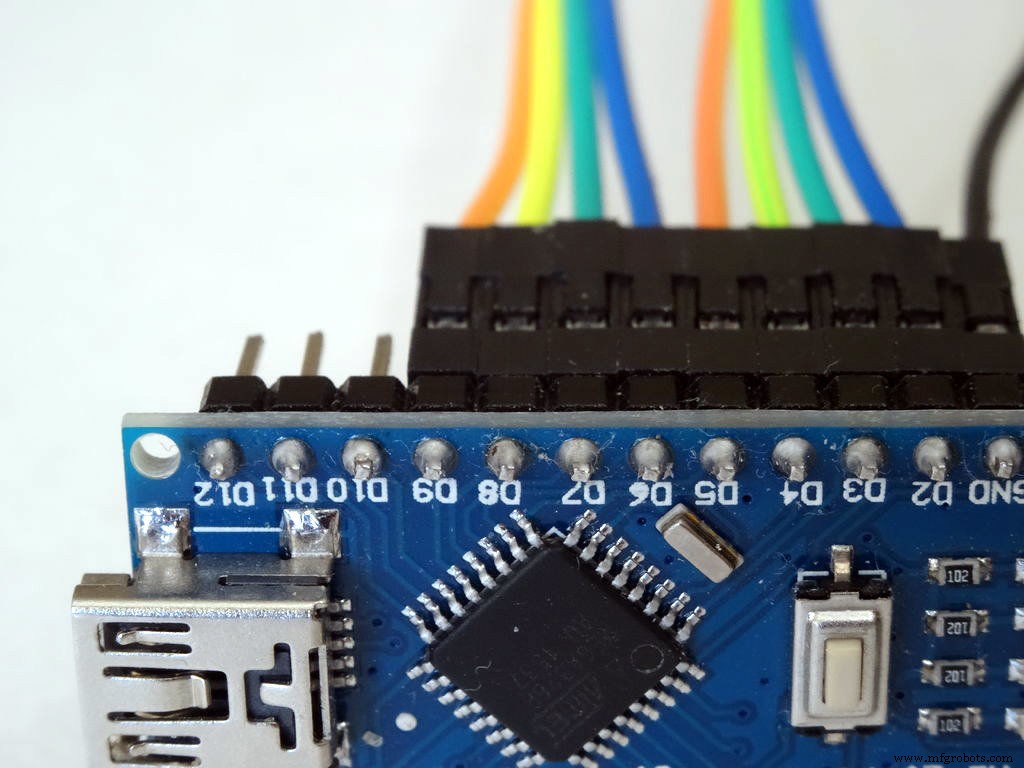
- Imagen 4 se muestra en rojo ¿Dónde están los Digital 2 a Digital 9 ? pines del Arduino Nano. En azul se muestra la conexión realizada en el paso anterior.
Paso 4:Conecta el Joystick al Arduino
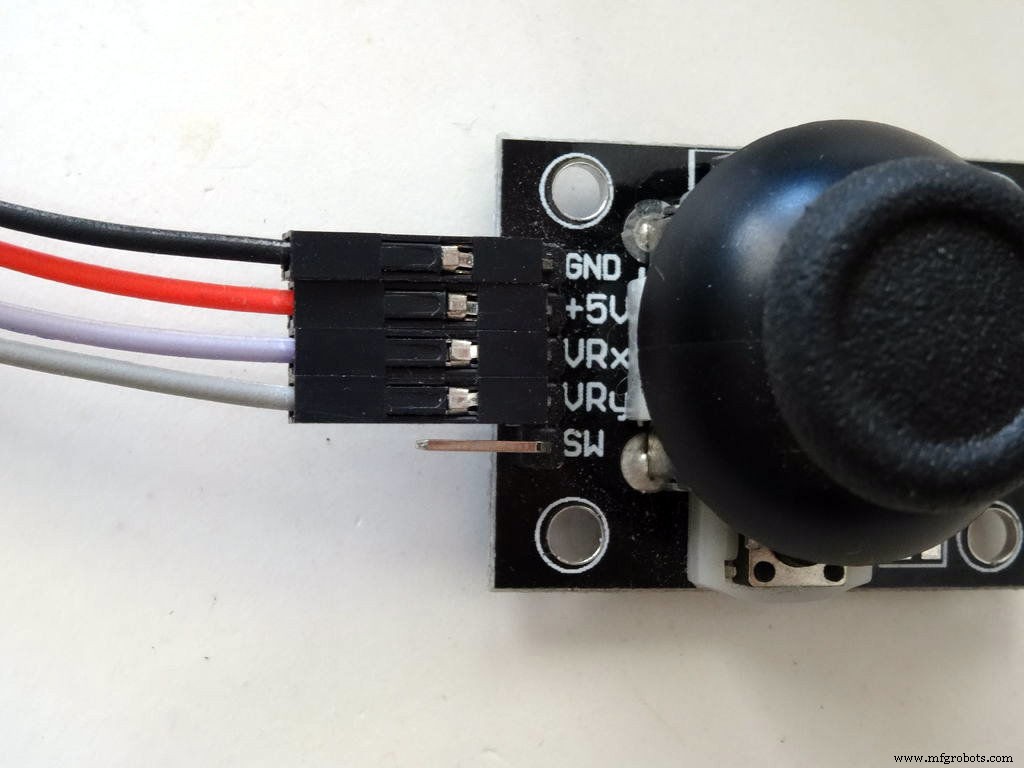
- Conectar Mujer-Mujer cables al suelo ( Cable negro ), Energía ( Cable rojo ), VRx ( Cable morado ) y VRy ( Cable gris ) del Joystick como se muestra en Imagen 1
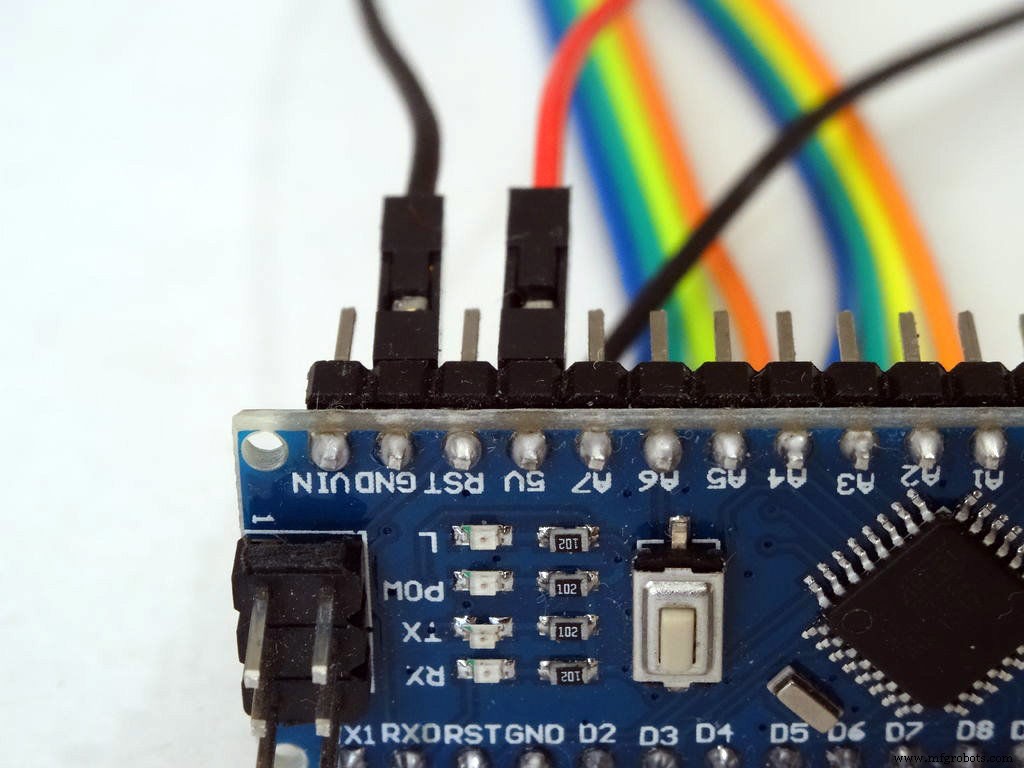
- Conecte el cable de tierra ( Cable negro ) al suelo pin del Arduino tablero ( Imagen 2 )
- Conecte el cable de alimentación ( Cable rojo ) al 5V Pin de alimentación del Arduino ( Imagen 2 )
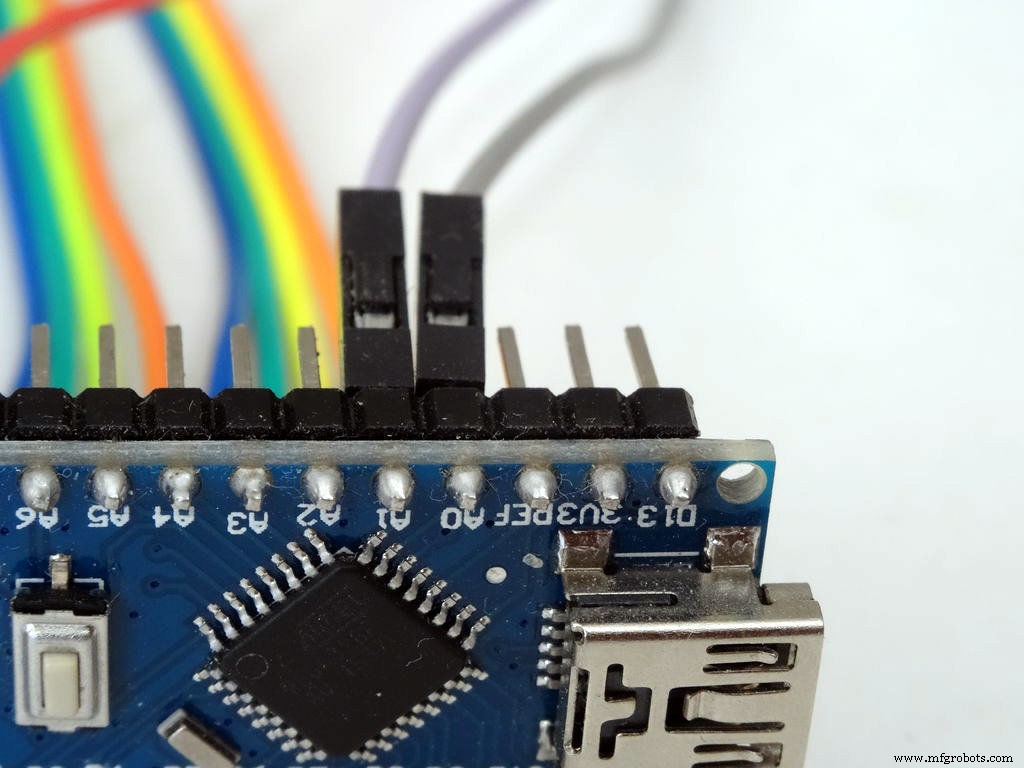
- Conecte el cable VRx ( Cable marrón ) el Analog 1 pin del Arduino tablero ( Imagen 3 )
- Conecte el cable VRy ( Cable gris ) el Analog 0 pin del Arduino tablero ( Imagen 3 )
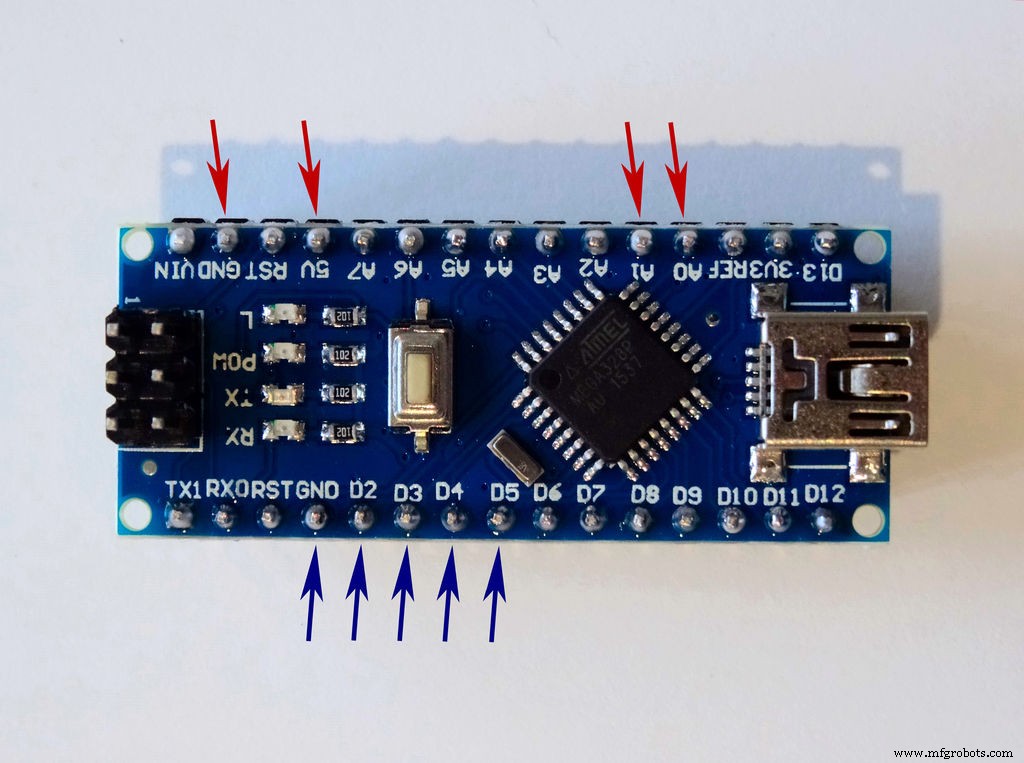
- Imagen 4 se muestra en rojo ¿Dónde están los Terrenos , 5V Energía, Analógico 0 y Analógico 1 pines del Arduino Nano. En azul se muestra la conexión realizada en los pasos anteriores.
Paso 5:Inicie Visuino y seleccione el tipo de placa Arduino
Para comenzar a programar Arduino, necesitará tener el IDE de Arduino instalado desde aquí:http://www.arduino.cc/.
¡Asegúrate de instalar 1.6.7 superior, de lo contrario, este tutorial no funcionará!
El Visuino :https://www.visuino.com también debe estar instalado.
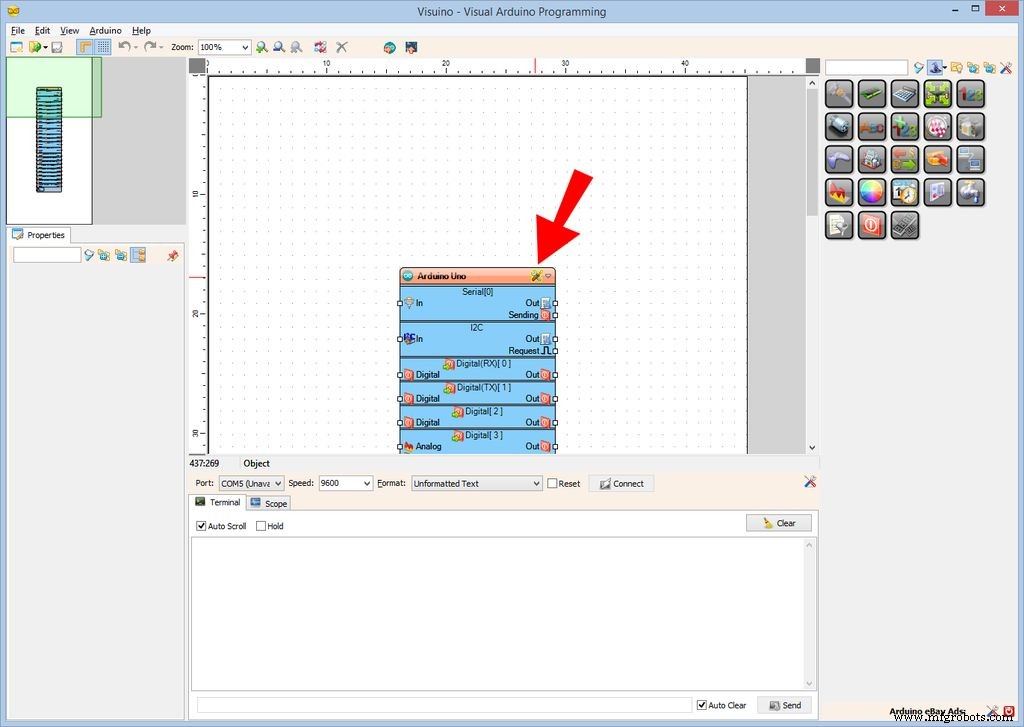
- Inicie Visuino como se muestra en la primera imagen
- Haga clic en " Herramientas "botón en el componente Arduino ( Imagen 1 ) en Visuino
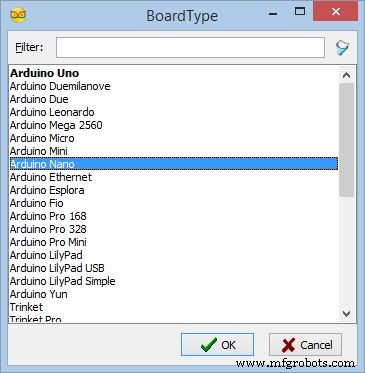
- Cuando aparezca el cuadro de diálogo, seleccione Arduino Nano como se muestra en Imagen 2
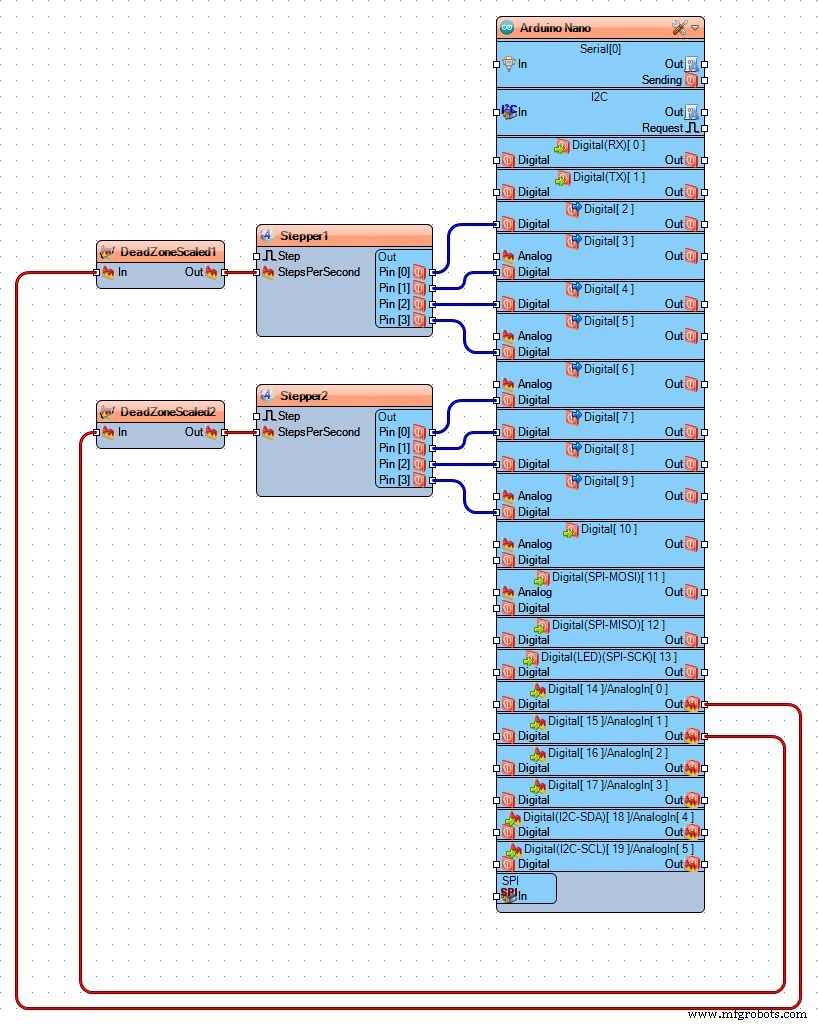
Paso 6:En Visuino:agregue y conecte los componentes del motor paso a paso
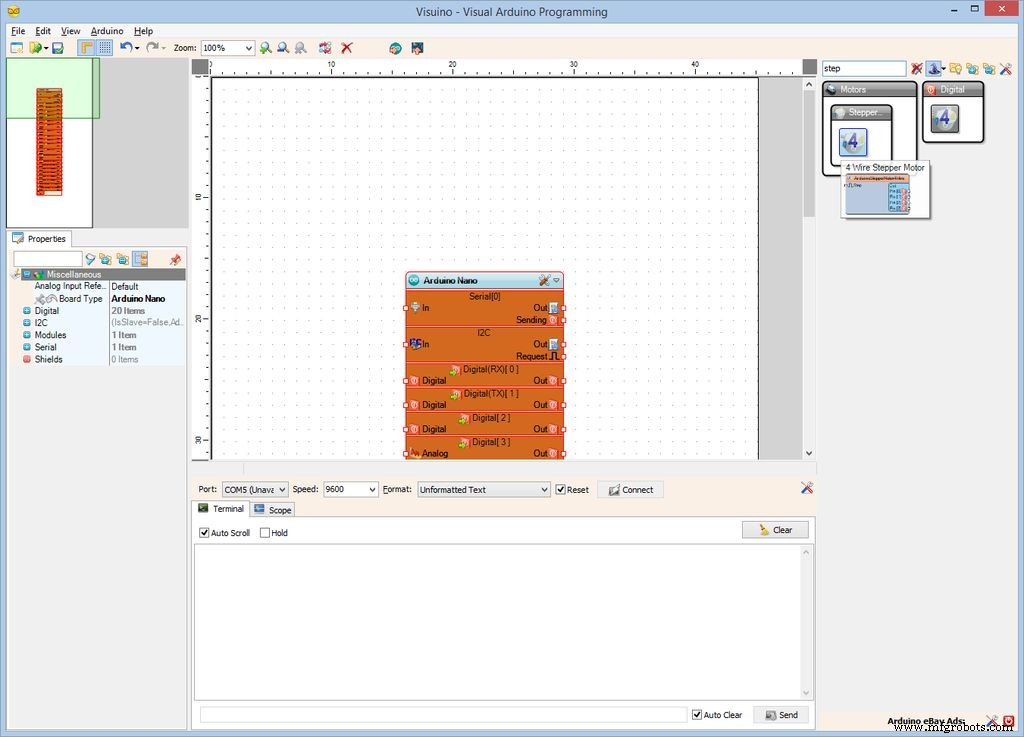

Primero necesitamos agregar componentes para controlar los motores paso a paso:
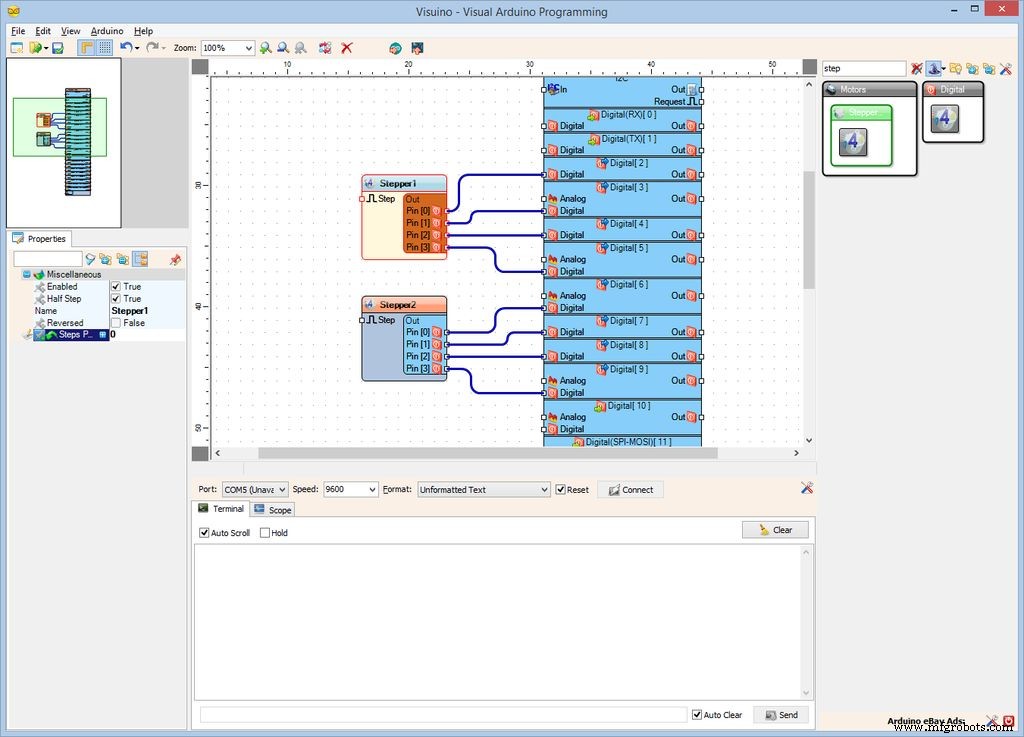
- Escriba " paso "en el cuadro Filtro de la Caja de herramientas de componentes y, a continuación, seleccione" Motor paso a paso de 4 cables "componente ( Imagen 1 ) y suelte dos de ellos en el área de diseño
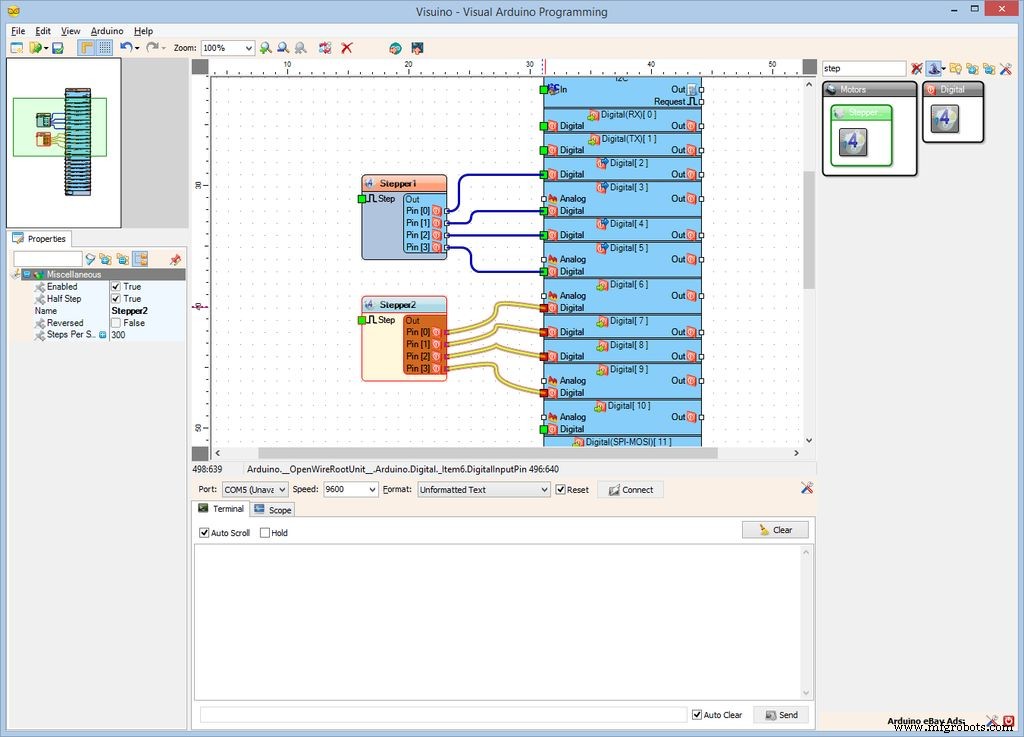
- Haga clic en " Fuera " cuadro que contiene los pines del Stepper1 componente para comenzar a conectar todos los pines de salida a la vez ( Imagen 2 )
- Mueva el mouse sobre el " Digital "pin de entrada del" Digital [2] "canal del Arduino componente. El Visuino extenderá automáticamente los cables para que se conecten correctamente al resto de los pines ( Imagen 2 )
- Haga clic en " Fuera " cuadro que contiene los pines del Stepper2 componente para comenzar a conectar todos los pines de salida a la vez ( Imagen 3 )
- Mueva el mouse sobre el " Digital "pin de entrada del" Digital [6] "canal del Arduino componente. El Visuino extenderá automáticamente los cables para que se conecten correctamente al resto de los pines ( Imagen 3 )
Paso 7:En Visuino:configure las propiedades del componente del motor paso a paso y agregue pines para controlar la velocidad
Como queremos controlar la velocidad de los steppers, necesitamos agregar pines a la propiedad "Pasos por segundo":
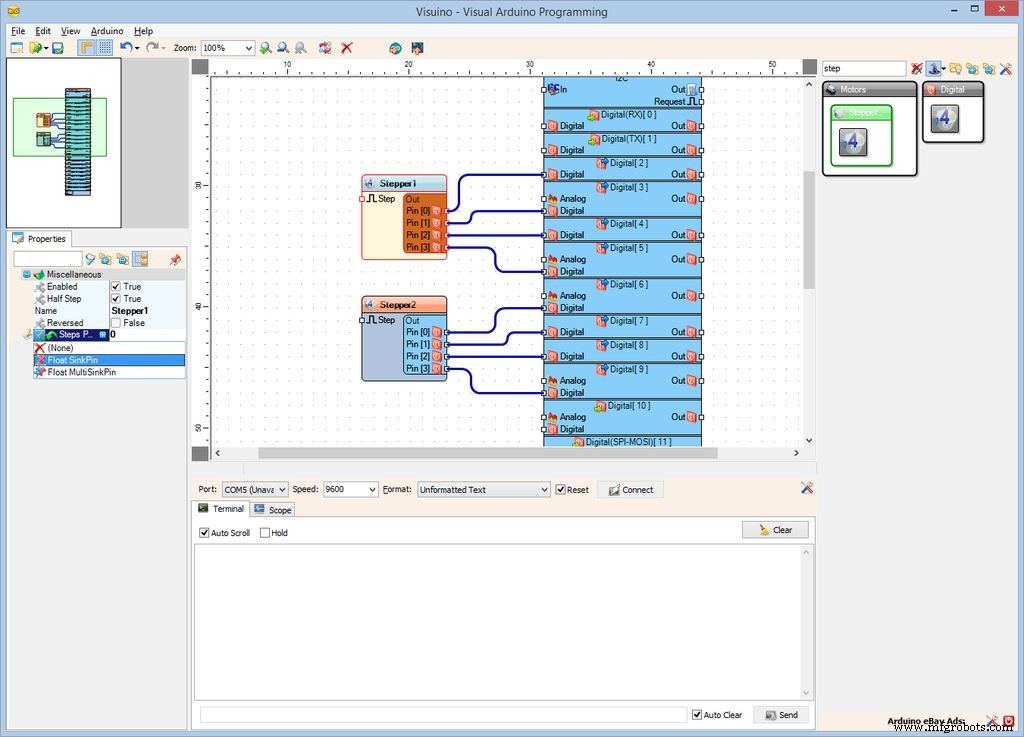
- Seleccione Stepper1 componente ( Imagen 1 )
- En el Inspector de objetos, establezca el valor de " Pasos por segundo "propiedad a" 0 "( Imagen 1 )
- En el Inspector de objetos, haga clic en Pin botón en la parte delantera de " Pasos por segundo "y seleccione" Float SinkPin "( Imagen 2 )
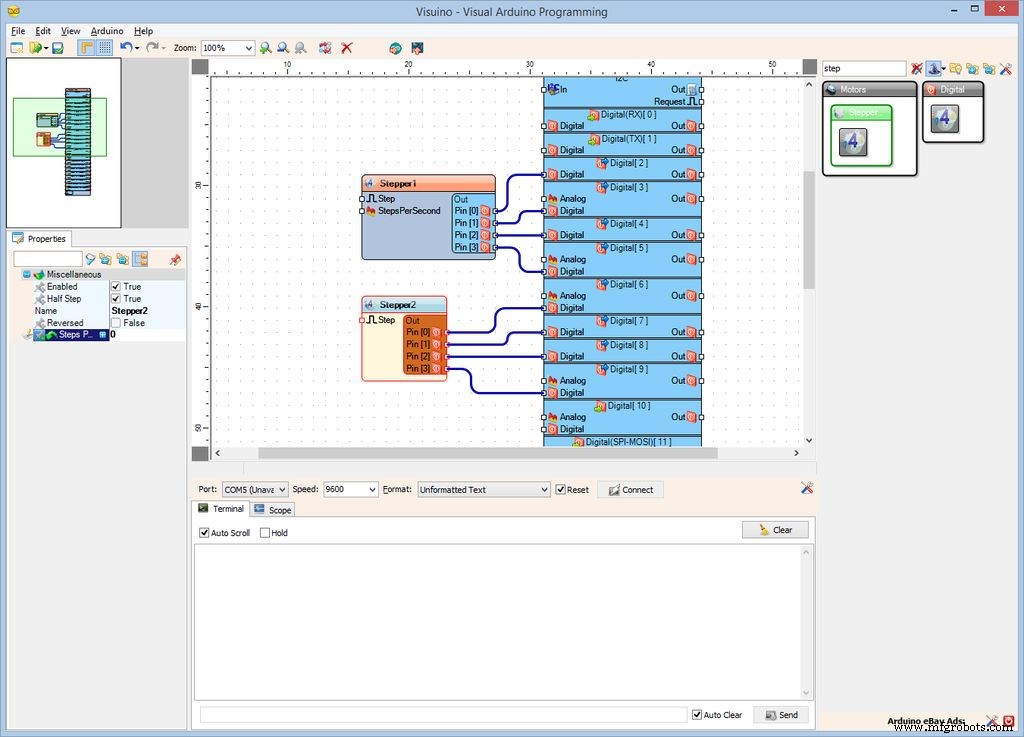
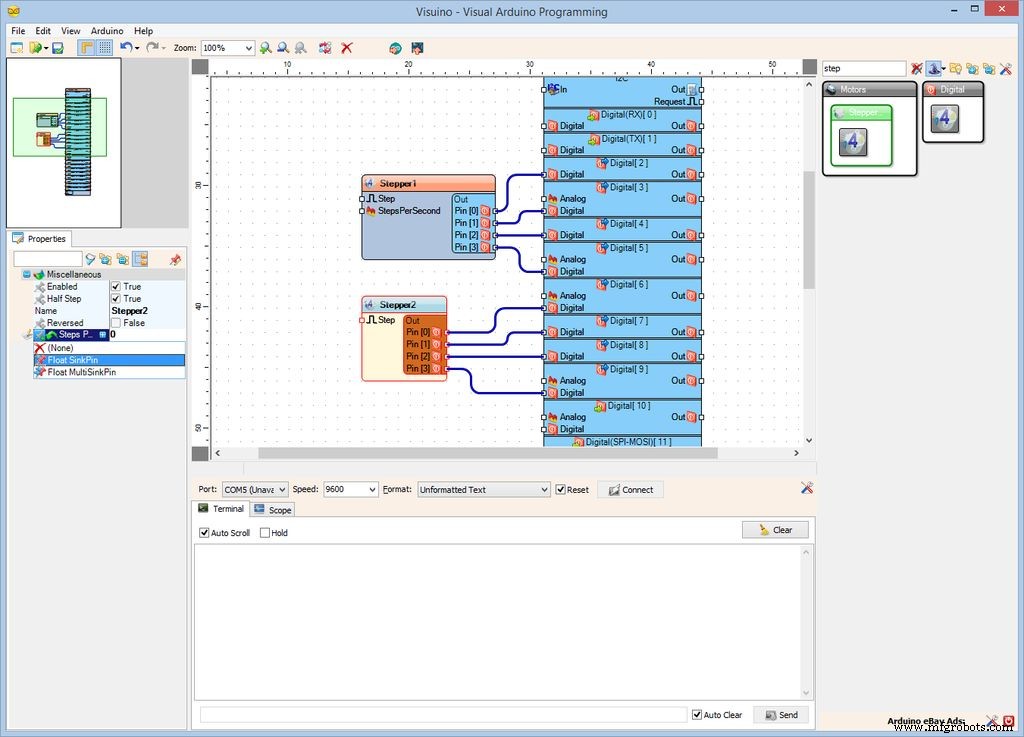
- Seleccione Stepper2 componente ( Imagen 3 )
- En el Inspector de objetos, establezca el valor de " Pasos por segundo "propiedad a" 0 "( Imagen 3 )
- En el Inspector de objetos, haga clic en Pin botón en la parte delantera de " Pasos por segundo "y seleccione" Float SinkPin "( Imagen 4 )
Paso 8:En Visuino:agregue y conecte componentes analógicos escalados de zona muerta
Los Pines Analógicos donde está conectado el Joystick generan valores normalizados entre 0.0 y 1.0. Necesitamos convertirlos a +/- 300 pasos por segundo. Dado que el joystick no es muy preciso cuando está en la posición central liberada, queremos que una pequeña zona alrededor del centro se considere 0,5, por lo que debemos introducir "Zona muerta":
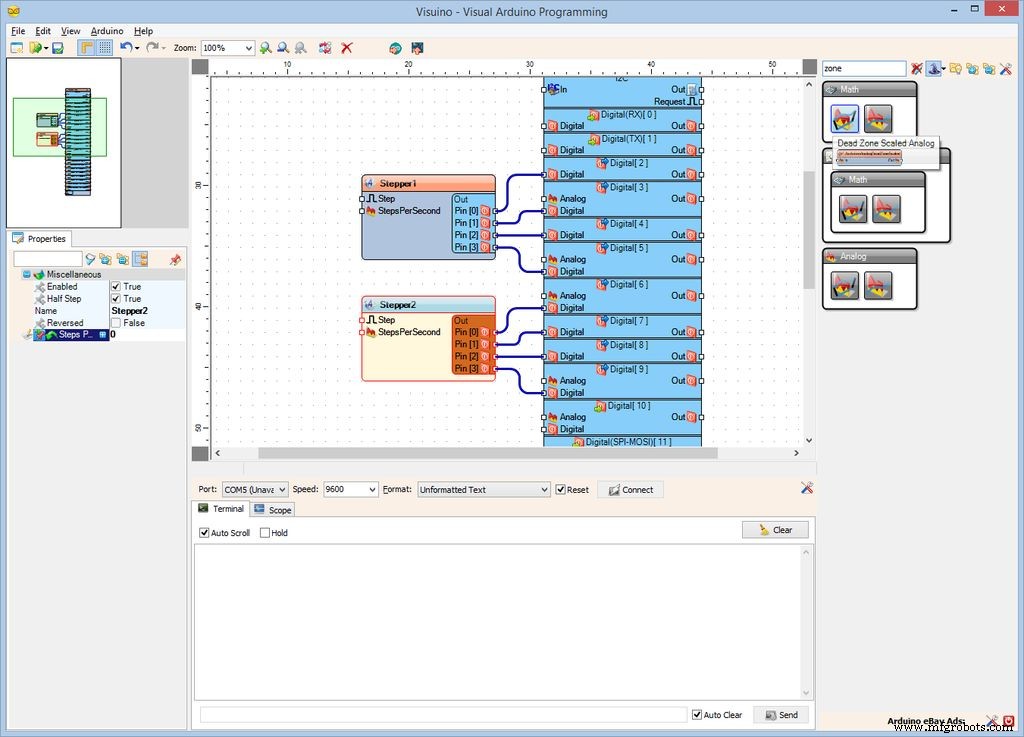
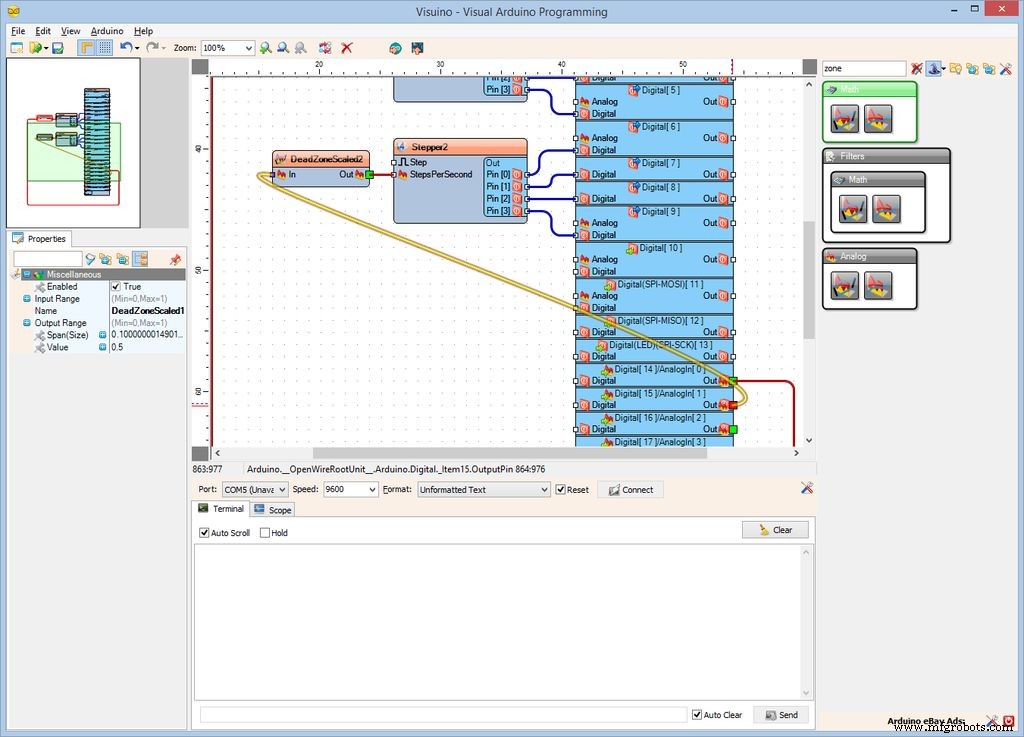
- Escriba " zona "en el cuadro Filtro de la Caja de herramientas de componentes y, a continuación, seleccione" Analógico escalado de zona muerta "componente ( Imagen 1 ) y suelte dos de ellos en el área de diseño
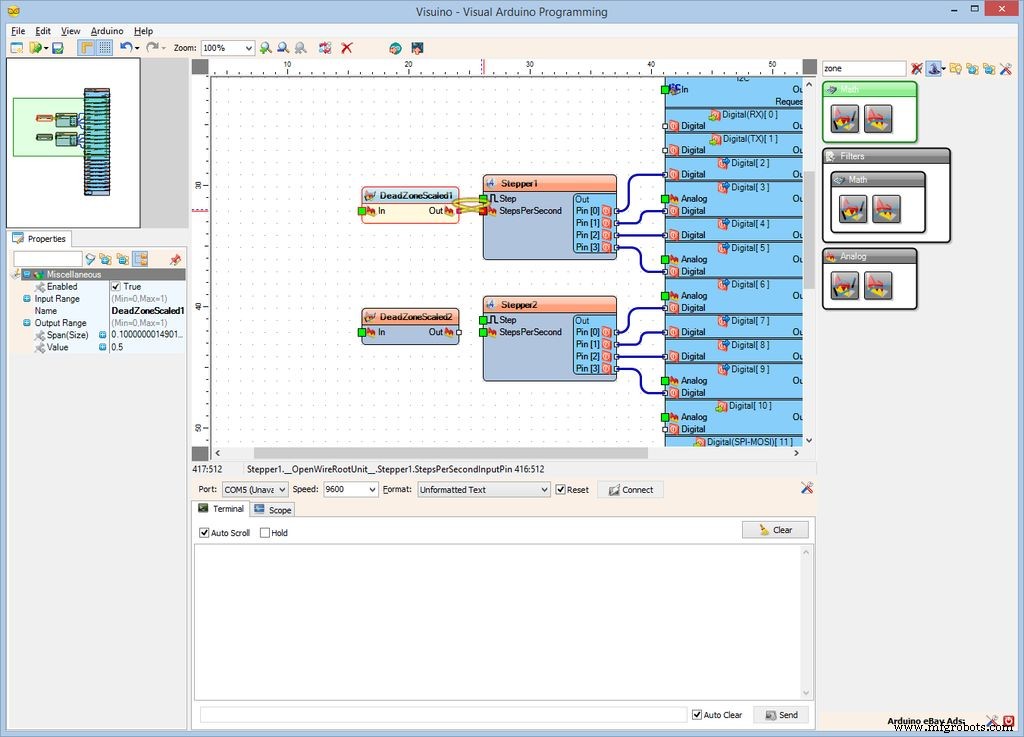
- Conecte el " Out "pin de salida de DeadZoneScaled1 del componente " StepsPerSecond "pin de entrada del Stepper1 componente ( Imagen 2 )
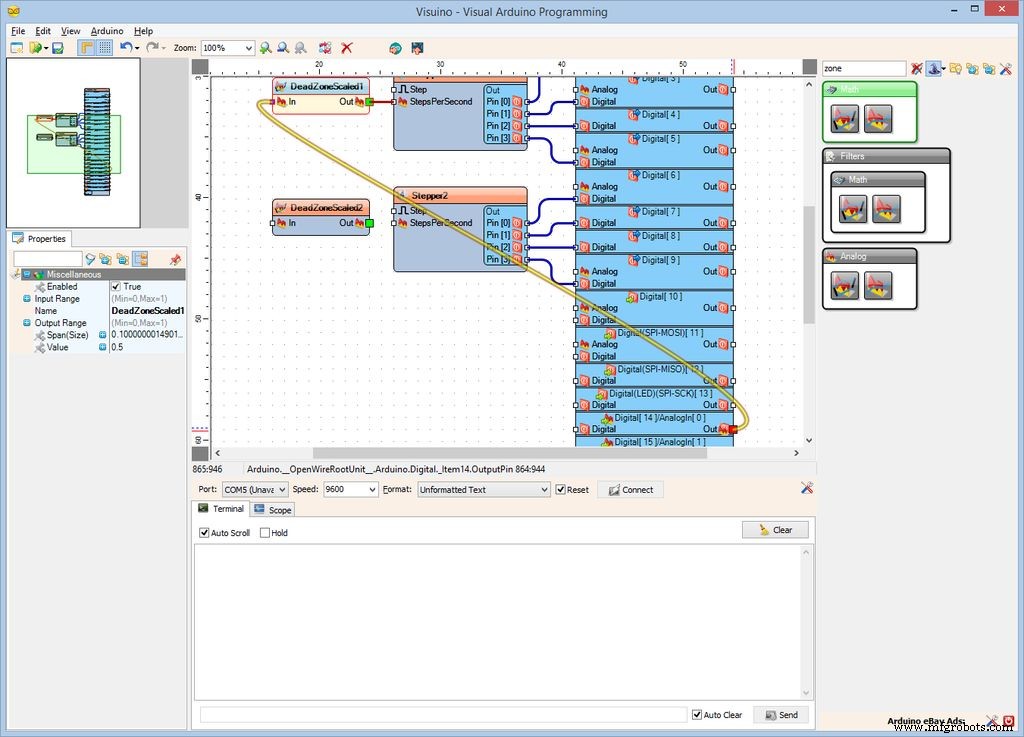
- Conecte el " Out "pin de salida del" Digital [14] / Analógico [0] "canal del Arduino componente al " En "pin de entrada de DeadZoneScaled1 componente ( Imagen 3 )
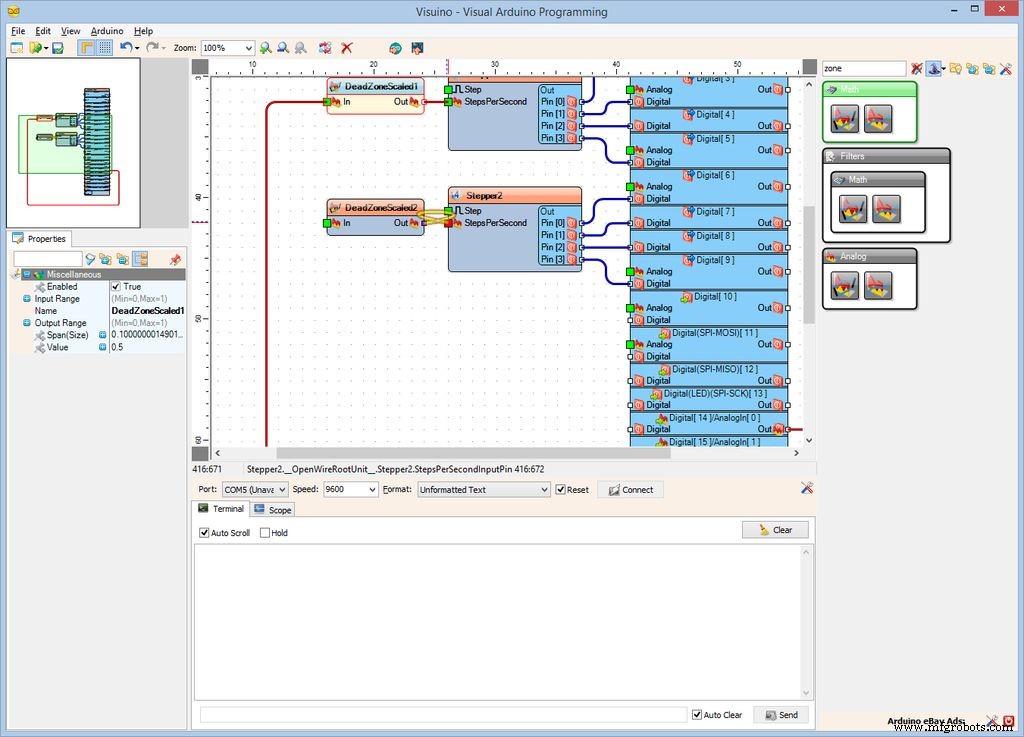
- Conecte el " Out "pin de salida de DeadZoneScaled2 del componente " StepsPerSecond "pin de entrada del Stepper2 componente ( Imagen 4 )
- Conecte el " Out "pin de salida del" Digital [15] / Analógico [1] "canal del Arduino componente al " En "pin de entrada de DeadZoneScaled2 componente ( Imagen 5 )
Paso 9:En Visuino:establezca las propiedades de los componentes analógicos escalados de la zona muerta
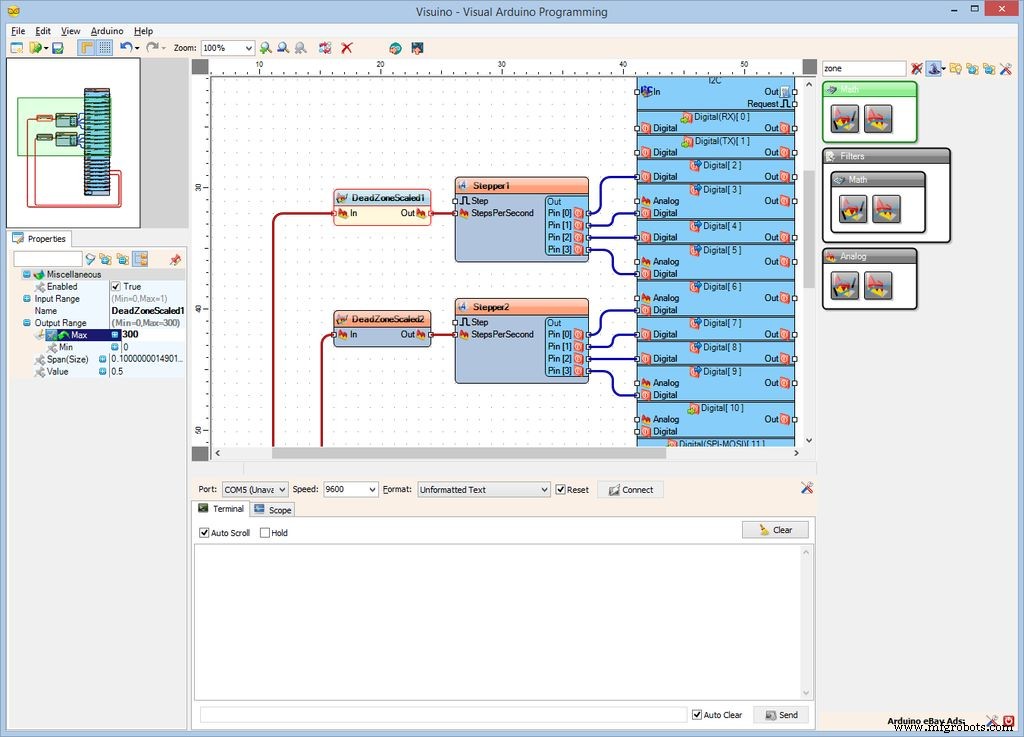
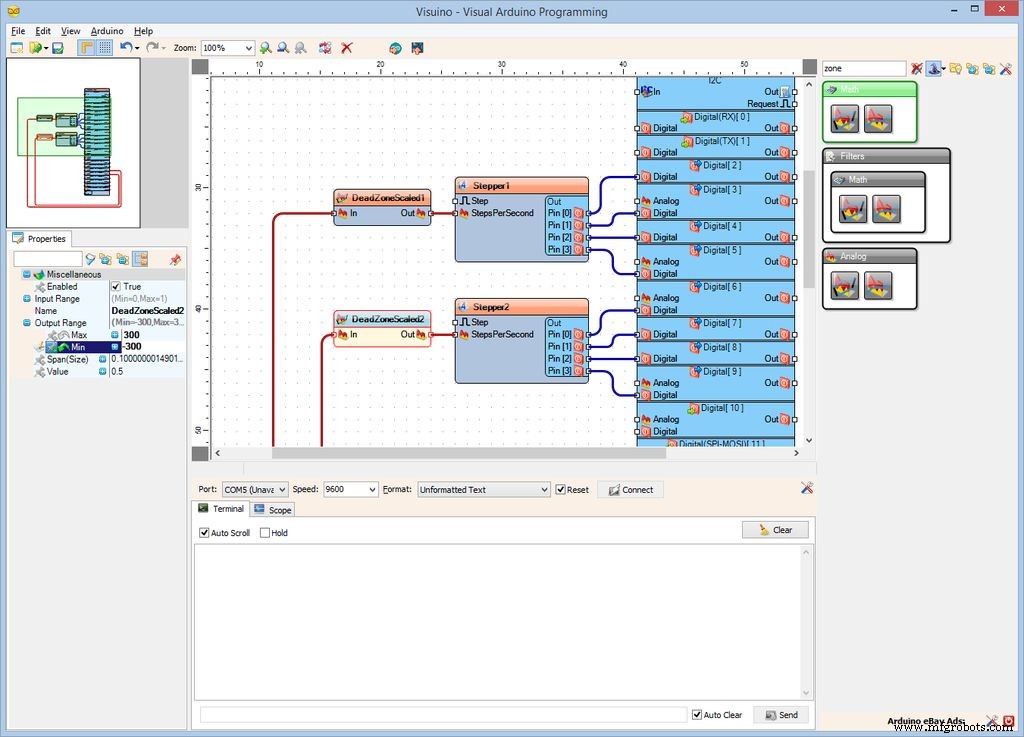
- En el área de diseño, seleccione DeadZoneScaled1 componente ( Imagen 1 )
- En el Inspector de objetos, expanda el " Rango de salida "propiedad ( Imagen 1 )
- En el Inspector de objetos, establezca el valor de " Máx. "subpropiedad del" Rango de salida "propiedad a" 300 "( Imagen 1 )
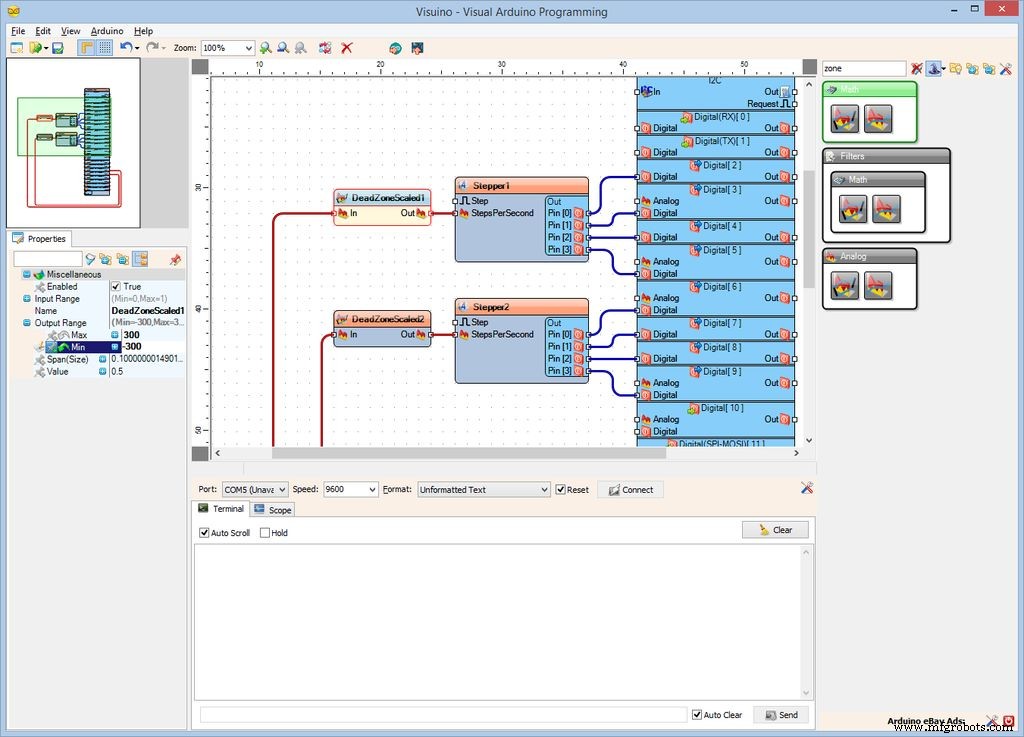
- En el Inspector de objetos, establezca el valor de " Mín. "subpropiedad del" Rango de salida "propiedad a" -300 "( Imagen 2 )
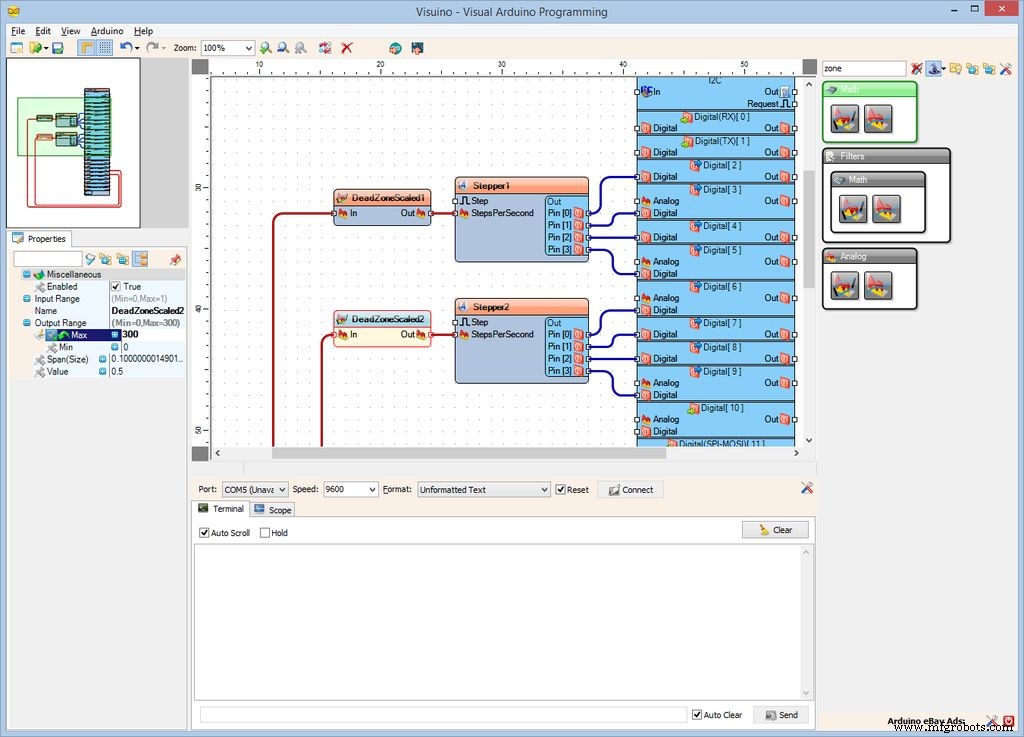
- En el área de diseño, seleccione DeadZoneScaled2 componente ( Imagen 3 )
- En el Inspector de objetos, expanda el " Rango de salida "propiedad ( Imagen 3 )
- En el Inspector de objetos, establezca el valor de " Máx. "subpropiedad del" Rango de salida "propiedad a" 300 "( Imagen 3 )
- En el Inspector de objetos, establezca el valor de " Mín. "subpropiedad del" Rango de salida "propiedad a" -300 "( Imagen 4 )
Paso 10:Genere, compile y cargue el código Arduino
- En Visuino , Presione F9 o haga clic en el botón que se muestra en Imagen 1 para generar el código Arduino y abrir el IDE de Arduino
- En Arduino IDE , haz clic en Subir , para compilar y cargar el código ( Imagen 2 )
Paso 11:Y juega ...

¡Felicitaciones! Has completado el proyecto.
Imagen 1 y el Video muestra el proyecto conectado y encendido.
Puedes controlar los Steppers con el Joystick como se ve en el video . Mover el joystick hacia arriba y Abajo controlará el Reenvío y al revés rotación de uno de los Steppers . Mover el joystick a la izquierda y Derecha controlará el otro Stepper .
En Imagen 2 puedes ver el Visuino completo diagrama.
También se adjunta el Visuino proyecto, que creé para este Tutorial. Puedes descargarlo y abrirlo en Visuino :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
Proceso de manufactura
- Controlar el aceptador de monedas con Arduino
- ¡Arduino con Bluetooth para controlar un LED!
- Determinación de la salud de una planta con TinyML
- Contador Geiger de mano con Arduino Nano
- ThimbleKrox - Control del mouse con los dedos
- Joystick de Arduino
- Controla una cucaracha con Arduino por menos de $ 30
- Control de coche con Arduino Uno y Bluetooth
- Controla el brazo del robot Arduino con la aplicación de Android
- Crea un robot para comer con Arduino Nano | Tornillo dorado
- Control de ventilador PWM de 4 pines y 25 kHz con Arduino Uno