


Cómo medir la masa de la Tierra usando Arduino
Componentes y suministros
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 2 | |||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Introducción
Un buen día, me estaba pesando en una balanza. De repente me vino a la mente un pensamiento:'¿Cuál sería la masa de la Tierra?' Deje eso aparte '¿Cómo podemos siquiera medirlo?' No existe tal báscula en la que se pueda colocar la Tierra. Tiene que haber alguna forma indirecta de medir la masa de la Tierra. Aquí presento la implementación de uno de esos métodos indirectos para medir la masa de la Tierra.
Paso 1:el método indirecto
A principios del siglo XIX, los científicos utilizaron la segunda ley de Newton y la ley de gravitación universal de Newton para medir la masa de la Tierra. Estas ecuaciones son F =ma y F =(GmM) / (r ^ 2) respectivamente (m =masa del objeto, a =aceleración, G =constante gravitacional, M =masa de la Tierra, r =Radio de la Tierra) . Si sustituimos g, es decir, aceleración debida a la gravedad por el término de aceleración 'a' y combinamos estas dos ecuaciones, obtenemos.
mg =GmM / r ^ 2
Esta ecuación se puede resolver para M, es decir, la masa de la tierra.
M =(gr ^ 2) / G.
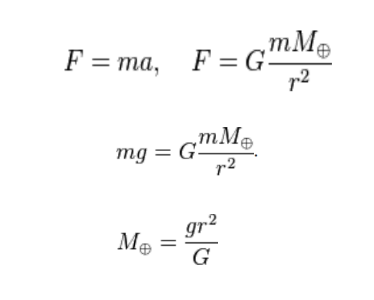
Supondremos que conocemos el valor de G y r. Encontraremos g, es decir, aceleración debida a la gravedad utilizando un pequeño experimento, que involucra arduino y algunos sensores. Finalmente, juntaremos todas las cosas para encontrar el valor de M.
mire la imagen adjunta para ver las expresiones matemáticas adecuadas.
Comencemos con el experimento.
Paso 2:descripción general del experimento
(tengan paciencia conmigo por un poco de matemáticas aquí arduino se activará pronto)
Para determinar la aceleración debida a la gravedad, necesitamos saber algo llamado "caída libre", es un movimiento en el que un cuerpo / objeto se mueve hacia la tierra, solo bajo la fuerza de la gravedad. Ahora bien, son pocos los términos científicos que caracterizan esta caída libre. Son velocidad inicial, velocidad final, distancia recorrida, tiempo de vuelo y aceleración.
- Velocidad inicial - velocidad del cuerpo en caída libre al inicio de la caída libre o al inicio del experimento.
- Velocidad final - velocidad del cuerpo en caída libre al final de la caída libre del final del experimento.
- Distancia recorrida - distancia recorrida por el cuerpo en caída libre durante la caída libre.
- Hora de vuelo - tiempo necesario para cubrir la distancia recorrida en caída libre.
- Aceleración - la tasa de cambio de velocidad observada por el cuerpo en caída libre. Es igual a la aceleración debida a la gravedad.
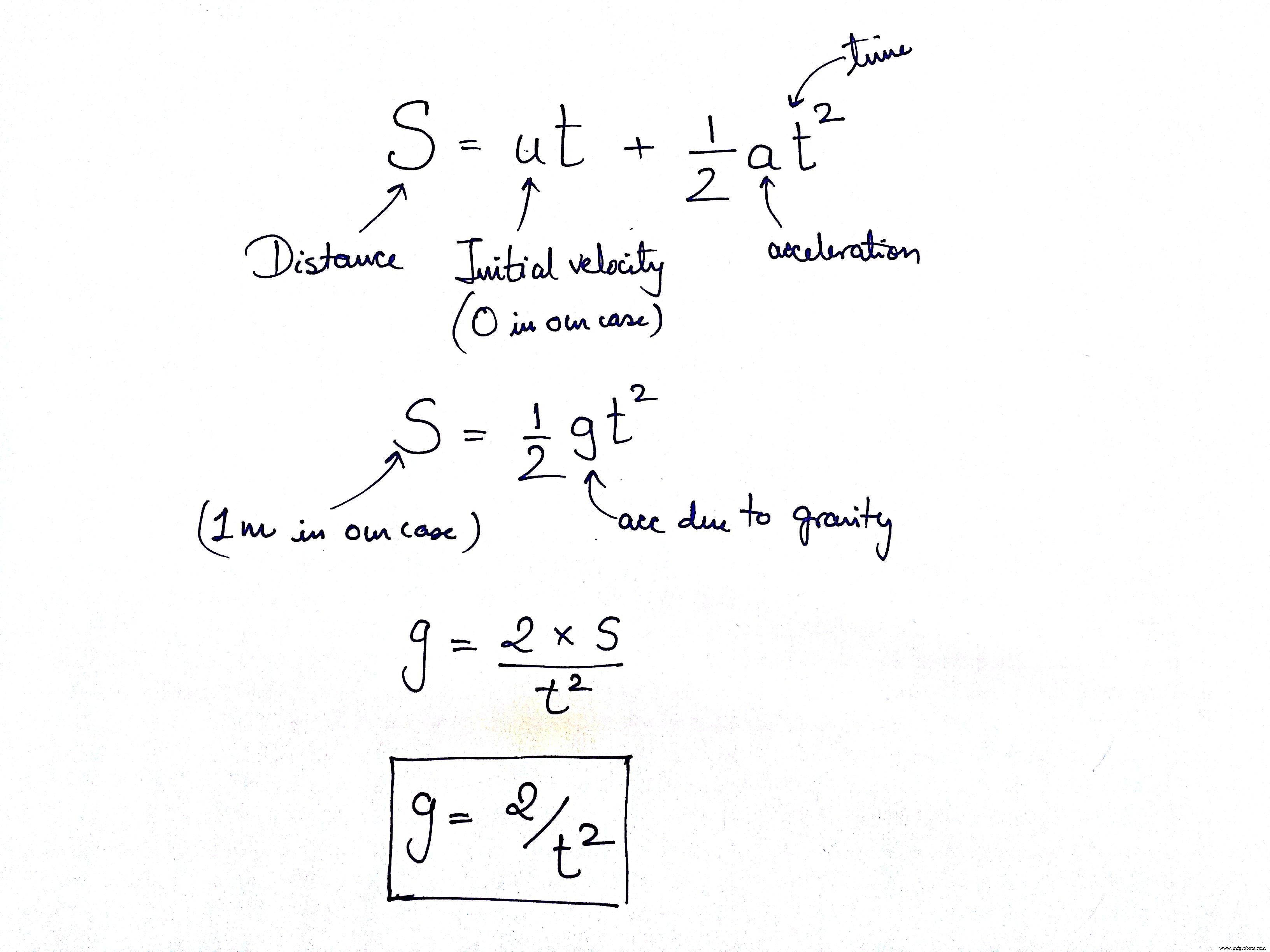
Ahora, hay una de las ecuaciones de Newton que dice:
Distancia recorrida =(velocidad inicial * tiempo de vuelo) + (aceleración * (tiempo de vuelo) ^ 2) / 2
Hay 4 variables en la ecuación anterior, incluida una de nuestro interés, es decir, 'aceleración', de estas 4 variables, si conocemos 3, podemos calcular la cuarta incógnita restante.
Podemos arreglar 2 de ellos
- Distancia recorrida =1 metro (dejaremos caer nuestro objeto desde 1 metro de altura)
- velocidad inicial =0 m / s (comenzaremos nuestro experimento desde el reposo)
Nos quedamos con 2 variables desconocidas, aquí es donde arduino entra en acción y nos ayuda a encontrar tiempo de vuelo. Para determinar con precisión la hora del vuelo, necesitamos dos marcas de tiempo:1. inicio del vuelo y 2. final del vuelo.
Crearemos circuitos personalizados para determinar estas dos marcas de tiempo en el paso 4, describo el circuito para encontrar la marca de tiempo para el inicio del vuelo y en el paso 5 el final del vuelo.
Con la ayuda de arduino y algunos sensores, calcularemos el tiempo de vuelo, dejando solo una incógnita en la ecuación anterior, es decir, la aceleración debido a la gravedad (¡bingoooo!).
Pongamos nuestros valores de variables fijas en la ecuación mencionada anteriormente, para simplificar aún más la ecuación.
1 =(g * (tiempo de vuelo) ^ 2) / 2
Entonces,
g =2 / (tiempo de vuelo) ^ 2
Los detalles del experimento seguirán en el paso 7.
En caso de duda consulte la imagen adjunta.
Paso 3:Cosas que necesitaremos
Aquí está la lista de cosas que necesitaremos para experimentar para medir la aceleración debida a la gravedad.
- Cualquier placa Arduino, preferiblemente uno / duomilanove (no hay una razón específica solo por la que he usado esta placa para este experimento)
- Cable USB para conectar Arduino a la PC
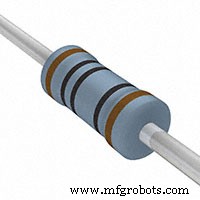
- Resistencias de 560 ohmios (4 en cantidad), resistencias de 100 ohmios (2 en cantidad)
- sensor piezoeléctrico (4 en cantidad)
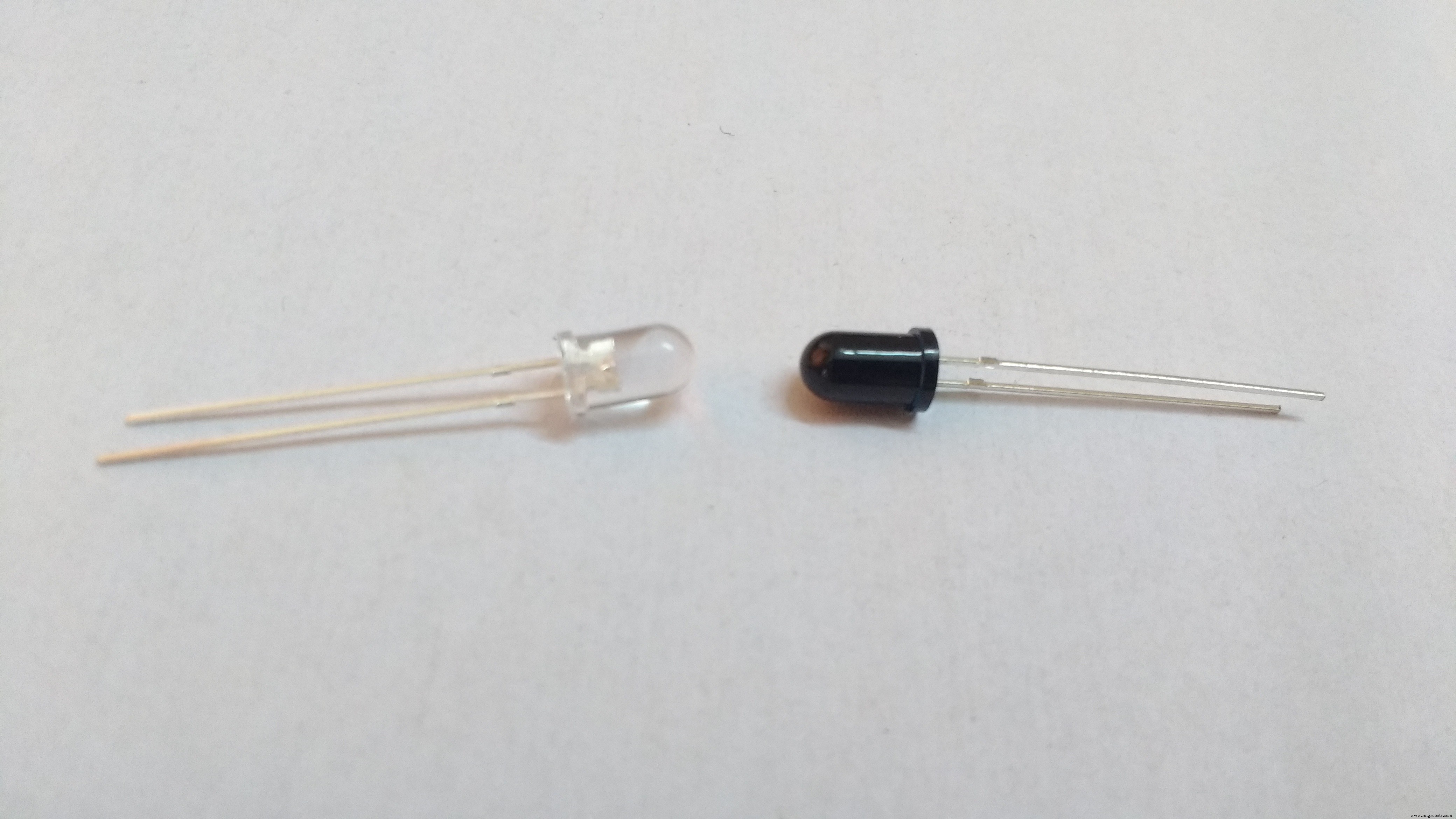
- Un par de IR Tx (IR LED) y Rx (Fotodiodo)
- Un potenciómetro
- Un opamp (como UA741C)
- Un breadoard
- Tres cables de 1,2 metros de largo
- PCB pequeña de 5 cm x 5 cm de uso general para ensamblar circuitos de infrarrojos
- Cinta
- Hoja de cartón
En caso de duda mire las Imágenes adjuntas.










Paso 4:esquema 1:el circuito de infrarrojos
Este circuito se utilizará para marcar la hora de inicio de la caída libre de un objeto utilizado para medir 'g'. Estos son los puntos importantes sobre la imagen esquemática de fritzing adjunta.
- El LED de infrarrojos se utiliza en polarización directa que actúa como un LED normal en esta aplicación, es decir, ilumina el fotodiodo del receptor de infrarrojos.
- El fotodiodo se utiliza en polarización inversa.
- La salida de la unión del cátodo y la resistencia está conectada a uno de los terminales de entrada del opamp.
- Otro terminal de entrada del opamp está conectado al potenciómetro que determina el voltaje de umbral.
- La salida de opamp va a la placa Arduino.
Consulte el video (tiempo =5m 16s) en caso de duda.
Paso 5:Esquema 2:Circuito piezoeléctrico
Este circuito se utilizará para marcar el tiempo de finalización de la caída libre de un objeto utilizado para medir 'g'. Estos son los puntos importantes sobre la imagen esquemática de fritzing adjunta.
- 4 sensores piezoeléctricos están conectados como se muestra en el esquema.
- La resistencia de 4560 ohmios está conectada en paralelo con los sensores piezoeléctricos para reducir el pico de voltaje generado por el sensor piezoeléctrico cuando un objeto en caída libre golpea su superficie.
- El terminal negativo de los sensores piezoeléctricos está conectado a la tierra del circuito.
- El terminal positivo del sensor piezoeléctrico está conectado a los pines de entrada analógica.
En caso de duda, consulte el video adjunto (tiempo =9 m 2 s).
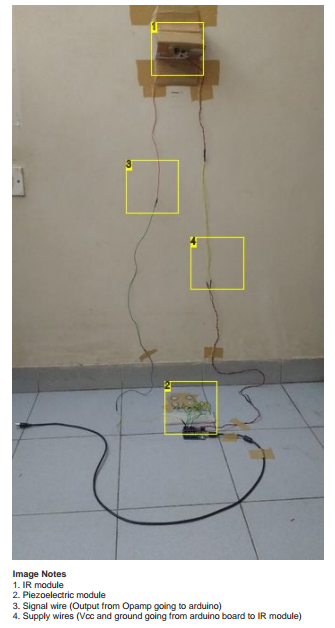
Paso 6:unir las cosas
Siga estas instrucciones para armar las cosas.
- Utilice cartulina para hacer una estructura similar a un techo y péguela a la pared aproximadamente a 1,1 metros.
- Coloque el módulo de infrarrojos mirando hacia abajo al techo de cartón.
- Conecte la salida del opamp al pin no 4 de Arduino usando uno de los cables de 1,2 m de largo.
- Conecte Vcc y GND desde arduino al módulo IR usando el resto de los cables de 1,2 m de largo.
- Asegúrese de que los cables estén firmemente conectados a la pared, el módulo de infrarrojos al techo de cartón y el módulo piezoeléctrico al suelo justo debajo del módulo de infrarrojos.
En caso de duda, mire la imagen adjunta, está debidamente marcada para facilitar la comprensión del ensamblaje.
Paso 7:detalles del experimento
Con todo en su lugar (excepto el código Arduino, discutido en el paso 8), veamos el procedimiento de este experimento.
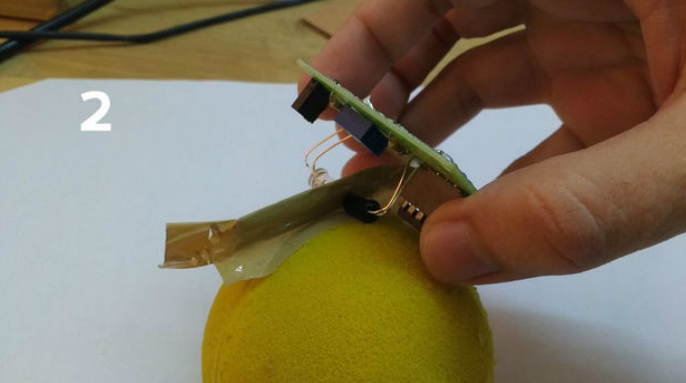
- Pegue una pequeña proyección delgada sobre el objeto utilizado para la caída libre como se muestra en la imagen numerada como 1.
- Antes de dejar nuestro objeto para que continúe en caída libre, sosténgalo justo en la marca de 1 metro, de modo que la proyección en la parte superior obstruya la luz del IR al fotodiodo. Como se muestra en la imagen numerada como 2.
- deje el objeto sin aplicar ninguna fuerza para dejarlo caer libremente sobre la zona de aterrizaje piezoeléctrica.
- A medida que cae, no hay ninguna obstrucción en el camino de IR TX y RX, lo que nos da la señal sobre el objeto que acaba de dejar en términos del tiempo de inicio de la caída libre.
- Cuando el objeto toca la zona de aterrizaje, los sensores piezoeléctricos generan un pico de voltaje controlado que notifica la llegada del objeto en términos del tiempo de finalización de la caída libre.
- Si restamos la hora de finalización de la hora de inicio, obtenemos el tiempo de vuelo que usaremos para calcular la aceleración debida a la gravedad como discutimos en el paso 2.

Paso 8:Código Arduino
Adjunto el código Arduino para este experimento. El código es realmente simple. En caso de cualquier duda consulte el video donde explico el código en detalle (tiempo en video =13minutos 35 segundos).
Paso 9:hagamos el experimento
Debes tener cuidado con las siguientes cosas antes de realizar este experimento.
- El umbral del sensor piezoeléctrico debe establecerse correctamente en el código arduino.
- Coloque el panel piezoeléctrico justo debajo del módulo de infrarrojos.
- Asegúrese de dejar caer el objeto desde 1 metro sin aplicar ninguna fuerza externa.
Aquí estoy haciendo este experimento en la marca de tiempo de 17 minutos en el video adjunto. Calcularemos la masa de la tierra utilizando los resultados, es decir, el tiempo de vuelo obtenido de este experimento.
Paso 10:resultados y masa de la Tierra
Después de repetir este experimento 3 veces, obtuve los siguientes resultados en términos de tiempo de vuelo.
- 443 ms
- 443 ms
- 464 ms
Tomemos el promedio.
Tiempo medio de vuelo =450 ms
Si sustituimos este valor en la ecuación para obtener la aceleración debida a la gravedad, obtenemos una aceleración de alrededor de 9,8755 m / s2. Como se ve en la imagen adjunta.
Finalmente sustituyendo este valor de 'g' para obtener la masa de la tierra obtenemos que sea de alrededor de 6.0066 x 1024 Kg, como se puede ver en la imagen adjunta.
La masa real de la Tierra según Google es 5,972 x 1024 kg. Creo que nos acercamos.
Gracias por tu tiempo, en caso de cualquier duda consulta el video o ponlo en los comentarios estaré encantado de ayudarte.

Código
- código Arduino
Código Arduino Arduino
código arduino simple const int sensorPin1 =A0; const int sensorPin2 =A1; const int sensorPin3 =A2; const int sensorPin4 =A3; const int photoPin =4; const int ledPin =13; const int umbral =110; char stringToPrint [100]; int startTime, endTime; int val1, val2, val3, val4; void setup () {Serial.begin (115200); // ponga su código de configuración aquí, para que se ejecute una vez:pinMode (ledPin, OUTPUT); pinMode (sensorPin1, ENTRADA); pinMode (sensorPin2, ENTRADA); pinMode (sensorPin3, ENTRADA); pinMode (sensorPin4, ENTRADA); pinMode (photoPin, INPUT);} void loop () {// ponga su código principal aquí, para que se ejecute repetidamente:int start =digitalRead (photoPin); startTime =millis (); if (inicio ==HIGH) digitalWrite (ledPin, HIGH); while (inicio ==LOW) {digitalWrite (ledPin, LOW); val1 =analogRead (sensorPin1); val2 =analogRead (sensorPin2); val3 =analogRead (sensorPin3); val4 =analogRead (sensorPin4); // sprintf (stringToPrint, "% d,% d,% d,% d", val1, val2, val3, val4); //Serial.println(stringToPrint); if ((val1> =umbral) || (val2> =umbral) || (val3> =umbral) || (val4> =umbral)) {endTime =millis (); sprintf (stringToPrint, "% d ms", endTime - startTime); Serial.println (stringToPrint); digitalWrite (ledPin, ALTO); retraso (1000); digitalWrite (ledPin, BAJO); inicio =ALTO; }}} Esquemas
Esquema de fritzing para circuitos IR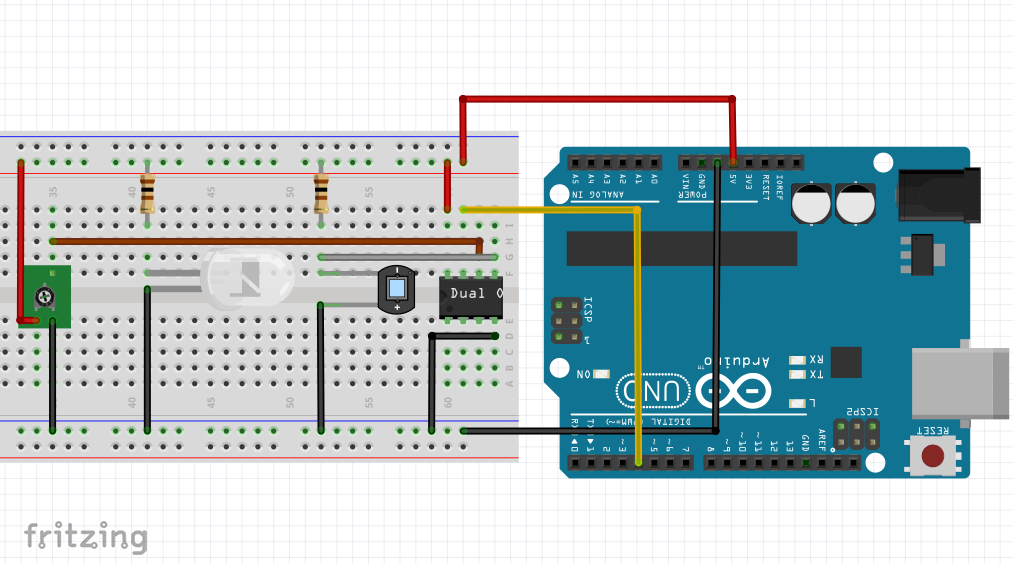 imagen de hardware
imagen de hardware 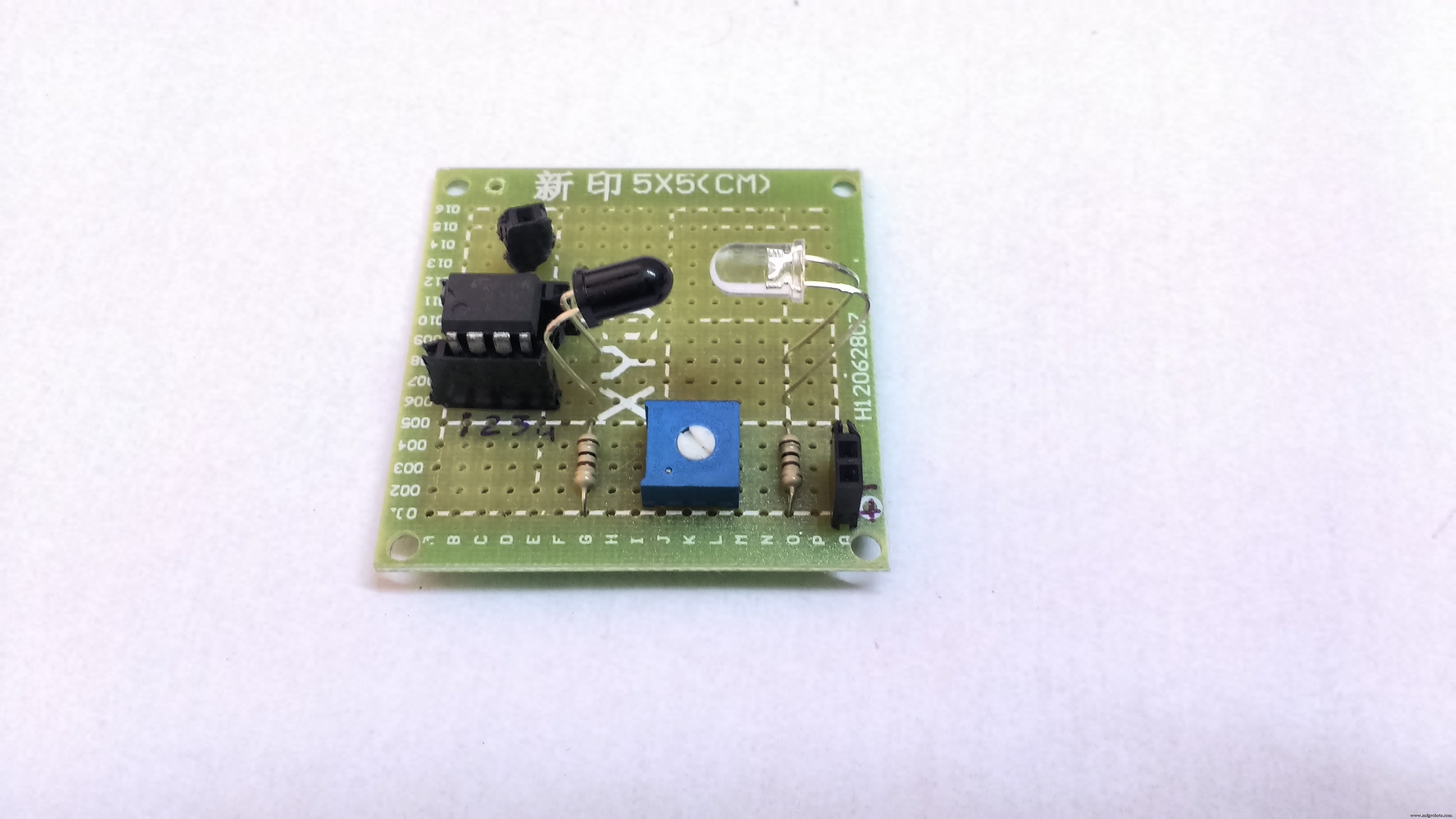 esquema de fritzing
esquema de fritzing 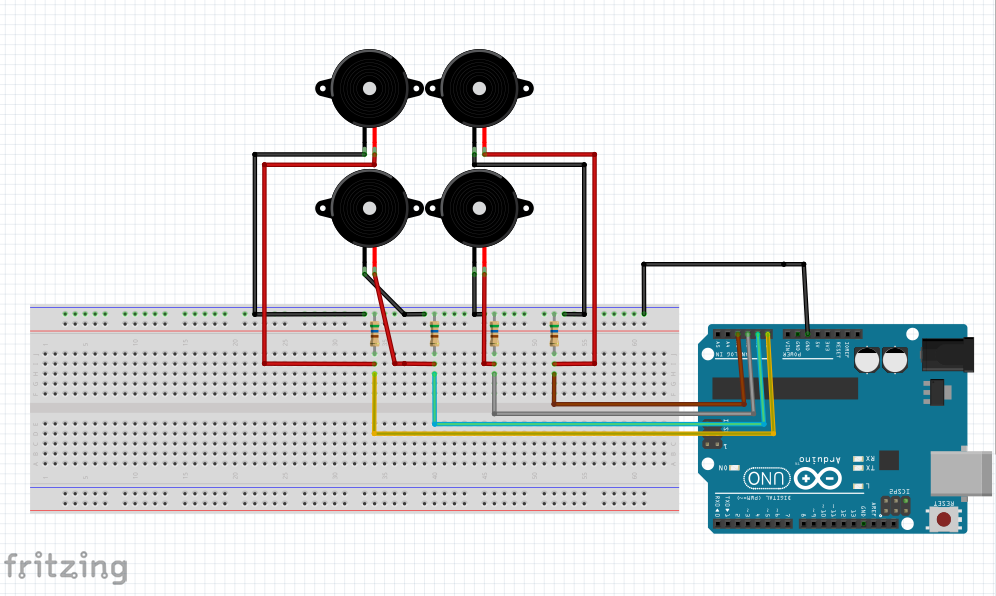 imagen de hardware
imagen de hardware 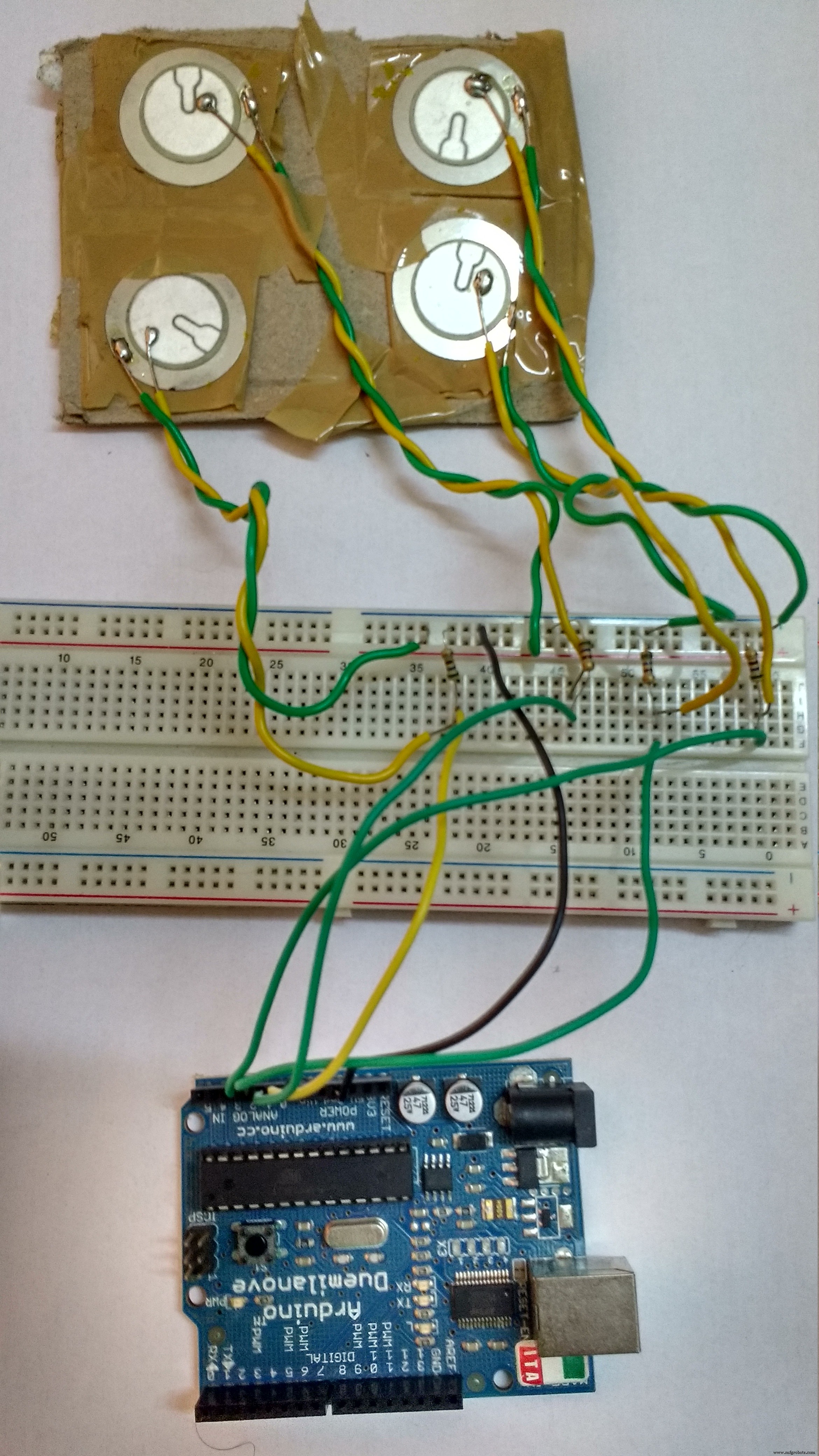
Proceso de manufactura
- Cómo medir la calidad del aire en OpenSensors
- Atenuación de luces con PWM usando el botón pulsador
- Máquina de LEVITACIÓN ULTRASÓNICA usando ARDUINO
- Medición de frecuencia y ciclo de trabajo con Arduino
- Encuéntrame
- Sonda usando arduino y visualización en procesamiento IDE
- Contador de autos usando Arduino + Procesamiento + PHP
- Uso del sensor de pulso portátil MAX30100 con Arduino
- Uso del sensor de humedad del suelo YL-39 + YL-69 con Arduino
- Cómo crear un sitio web comunicando Arduino usando PHP
- ¿Cómo medir la madurez digital de mi empresa?