


RTOS frente a GPOS:una guía completa
En esta era moderna, hemos visto muchas soluciones de software y hardware que requieren un sistema operativo. Los sistemas operativos ayudan a que estos dispositivos funcionen sin problemas y manejen toneladas de tareas diferentes. Sin embargo, como entusiasta de la electrónica, lo más probable es que necesite más información sobre qué tipo de sistema operativo necesita para su proyecto. Afortunadamente, tenemos lo que necesitas. En este artículo, encontrará todo sobre RTOS vs GPOS, sus comparaciones y varios tipos de aplicaciones. Además, si simplemente quieres saber más sobre estos sistemas operativos, estás en el lugar adecuado.
¿Listo? Comencemos.
Sistemas operativos de uso general (GPOS)
El GPOS es un sistema operativo que puede administrar una gran cantidad de procesos y completar una ejecución por unidad de tiempo, lo que nos gusta llamar rendimiento. A veces, el sistema operativo de uso general retrasaría la ejecución de un subproceso de alta prioridad para ejecutar cinco o seis procesos de baja prioridad.

Estación de trabajo de computadora
Por lo tanto, para lograr el alto rendimiento necesario, cumpliría cinco tareas de baja prioridad en lugar de ejecutar un proceso de alta prioridad. En otras palabras, si varias tareas de baja prioridad están en cola para su ejecución, el GPOS permitirá que estas tareas se ejecuten primero para mantener su alto rendimiento.
Ahora, la mayoría de los sistemas operativos de propósito general utilizan una política de imparcialidad para llevar procesos y subprocesos a la CPU.
Además, esta política permite que el GPOS brinde el alto rendimiento general que las aplicaciones de escritorio y servidor requieren para funcionar de manera eficiente.
Sin embargo, no puede garantizar que una tarea de alta prioridad o subprocesos de tiempo crítico se ejecuten antes que los subprocesos de baja prioridad. Por lo tanto, el sistema operativo de propósito general funciona mejor para dispositivos que realizan múltiples tareas al mismo tiempo.

Computadora personal (PC)
Sistema operativo en tiempo real (RTOS)
Por otro lado, RTOS tiene un diseño que maneja aplicaciones de tiempo crítico con alta precisión. Para que un sistema operativo entre en esta categoría, debe tener un período máximo de tiempo para cada operación crítica que realiza. En otras palabras, es un sistema de tiempo limitado.
Un sistema operativo en tiempo real es bastante complejo. Pero no te preocupes, lo desglosaremos por ti. El RTOS tiene tres funcionalidades básicas que son programador, servicios RTOS, sincronización y mensajería.
El programador
El planificador tiene tres estados:el primero está listo para ejecutarse, que se aplica a una tarea lista que puede cambiar al estado de ejecución cuando sea necesario. El segundo es el estado de ejecución que se aplica cuando se está ejecutando una tarea. Por último, el estado bloqueado es cuando la tarea no se puede ejecutar y se envía a un estado bloqueado.
Además, existen tres tipos de técnicas de programación que son:
Método de programación de tareas preventivas/Programación basada en prioridades
La técnica de programación preventiva implica una asignación de tiempo dependiente de la prioridad. Aquí, puede asignar un nivel de prioridad único a cada tarea.
Programación cooperativa
Aquí, puede asignar un espacio fijo a cada tarea. Sin embargo, si la tarea no completa su ejecución, perdería los datos generados y esperaría su próximo turno.
Por último, el kernel se encarga de crear una tarea, cambiar la prioridad de una tarea, cambiar el estado de una tarea y eliminar una tarea.
Servicios RTOS
En el corazón de cada sistema operativo hay un kernel. El kernel es responsable de administrar y asignar los recursos de un sistema operativo. Sin embargo, las tareas no siempre pueden llamar la atención de la CPU, por lo que el kernel debe proporcionar otros servicios como servicios de tiempo, servicios de entrada y salida, servicios de manejo de interrupciones, servicios de administración de memoria y servicios de administración de dispositivos.
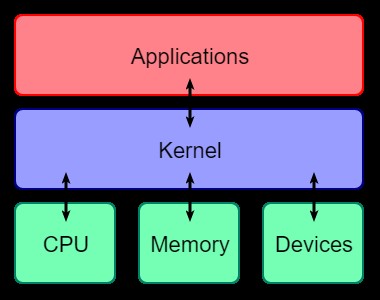
Diagrama del núcleo
Mensajería y Sincronización
La funcionalidad de mensajería ofrece una forma para que el RTOS se comunique con otros sistemas entre tareas. Los servicios de mensajería incluyen buzones, conductos, colas de mensajes, indicadores de eventos y semáforos.
Los buzones, las colas de mensajes y las canalizaciones pueden enviar mensajes entre tareas, mientras que los indicadores de eventos pueden sincronizar todas las actividades entre tareas. Además, los semáforos pueden sincronizar el acceso a los recursos compartidos.
RTOS (sistemas operativos en tiempo real) frente a GPOS (sistemas operativos de uso general)
La diferencia básica entre el RTOS y el GPOS es la naturaleza de la aplicación (si es crítica en el tiempo o no, o si es única o multipropósito). Un buen ejemplo de un sistema de tiempo crítico es un cajero automático. Una persona esperaría 4 o 5 segundos para sacar dinero de un cajero automático después de presionar el botón de confirmación. A nadie le gustaría esperar cinco minutos después de presionar el botón de confirmación.

cajero automático
Por otro lado, las PC tienen múltiples propósitos, lo que las convierte en un sistema que no es crítico en cuanto al tiempo. Puede ejecutar varias aplicaciones al mismo tiempo con una PC. Además, no hay un momento particular para hacer nada en una PC e incluso en un teléfono inteligente. Por ejemplo, guardar un documento puede llevar segundos o minutos en algunos casos. Pero esto depende de la cantidad de procesos y tareas en ejecución.

Teléfono inteligente
Por lo tanto, un sistema operativo de propósito general funciona para aplicaciones y sistemas que no son críticos en cuanto al tiempo, como Linux, Windows, etc.
Sistema Linux
Mientras que los sistemas operativos en tiempo real funcionan para aplicaciones de tiempo crítico que necesitan respuestas rápidas y predecibles, como UCOS, VxWorks, etc.
Aquí hay categorías para explicar mejor las diferencias entre los dos sistemas operativos:
Programación de tareas
En la categoría de programación de tareas, el GPOS no se enfoca en la prioridad. Maneja la programación de una manera que ofrece un alto rendimiento. Mientras que en el caso de un RTOS, la programación siempre se centra en la prioridad. A diferencia de GPOS, todos los procesos de alta prioridad se ejecutan antes que cualquier tarea de baja prioridad.

Ventanas
Problemas de latencia
Aquí hay un problema importante que afecta al GPOS. La mayoría de los GPOS tienen una latencia de envío ilimitada, lo que significa que cuantos más subprocesos programar, más latencias se acumulan. RTOS no tiene tales problemas ya que todos los subprocesos y procesos tienen latencias limitadas (los subprocesos se ejecutarán dentro de un límite de tiempo establecido).
Factores económicos y de hardware
RTOS funciona para sistemas independientes y de gama baja, como una máquina expendedora o un cajero automático. Además, el RTOS es pequeño y liviano en comparación con un GPOS. Además, GPOS funciona para fines generales y dispositivos de alta gama como estaciones de trabajo o computadoras personales.

Dispositivos de gama alta
Núcleo interrumpible
Un problema importante cuando se trata de la ejecución de procesos de alta prioridad primero es un kernel interrumpible. Por lo tanto, si un kernel no es reemplazable, una solicitud de este kernel anularía inmediatamente todos los demás procesos en ejecución. Mientras que el kernel de un RTOS es prioritario, el kernel de un GPOS no lo es.
En otras palabras, la ejecución de un proceso de alta prioridad en un GPOS no puede adelantarse a una llamada del kernel, mientras que los procesos de alta prioridad en RTOS siempre se adelantarán a una tarea de baja prioridad si es necesario y tratarán las tareas fuera de la llamada del kernel como externas. procesos.
RTOS frente a GPOS– Evaluación y selección de un RTOS para el desarrollo de un producto integrado
Antes de evaluar un RTOS integrado que se ajuste a todos los requisitos de los sistemas integrados, asegúrese de comprobar que el RTOS potencial admita algunas funciones importantes.
Para facilitarle las cosas, aquí hay un resumen de estas características críticas:
RTOS frente a GPOS– Programadores
Los programadores de los sistemas operativos manejan el deber de decidir a qué hora el sistema operativo debe ejecutar cada tarea. Los programadores pueden suspender y reanudar cualquier tarea según los recursos disponibles y la prioridad. Por lo tanto, un RTOS integrado debe tener un programador incorporado. Permitirá que el RTOS realice la ejecución de tareas en tiempo real.
Temporizadores de software
Como su nombre lo indica, los temporizadores de software permiten la ejecución de funciones dentro de una ventana de tiempo específica. No es fácil ni aconsejable crear manualmente un temporizador de software para su RTOS, así que asegúrese de seleccionar un RTOS con un temporizador de software incorporado.
RTOS frente a GPOS– Mecanismo de colas
Las colas permiten que las tareas intercambien información. Un RTOS con un mecanismo de cola incorporado permitirá el intercambio de mensajes entre tareas.
Eherramientas de rastreo de ejecución
Con la herramienta de seguimiento, puede observar fácilmente el comportamiento en tiempo real de los sistemas en tiempo real. Así, su equipo de desarrollo puede rastrear y detectar cualquier error y la ejecución de tareas.
RTOS frente a GPOS:huella de memoria baja
Dado que necesita integrar un RTOS en una plataforma MCU, el futuro RTOS debe tener una huella de memoria baja. Significa que el tamaño total no debe ser más del 10 % del tamaño total de la MCU.
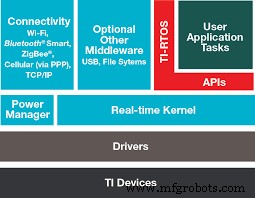
Arquitectura RTOS
Conclusión
En pocas palabras, tanto RTOS como GPOS funcionan bien en las aplicaciones creadas para ellos. Aunque RTOP puede generar un rendimiento menor que GPOS, no significa que su rendimiento sea bajo.
Mientras que GPOS maneja muchos procesos pesados, RTOP maneja menos tareas con un rendimiento relativo a la carga del sistema.
Sin embargo, la principal preocupación de un RTOS es ofrecer un patrón de ejecución más predecible y una ejecución oportuna, no un alto rendimiento. Sin embargo, lo contrario es el caso de GPOS. Bueno, eso resume todo sobre GPOS vs RTOS. Si tiene algún comentario o pregunta, no dude en comunicarse con nosotros. Estaremos encantados de ayudar.
Tecnología Industrial
- Mantenimiento basado en condiciones:una guía completa
- Una guía completa para el mantenimiento de propiedades
- Una guía completa para soldar acero inoxidable
- Cómo soldar hierro fundido:una guía completa
- Cómo soldar aluminio:una guía completa
- ¿Qué son los electrodos de soldadura? - Una guía completa
- Una guía completa sobre el acero inoxidable
- La guía completa para la impresión 3D
- Costos de herramientas de fabricación:una guía completa
- La guía completa para la gestión de inventario
- SCR Bt151:una guía manual completa