


¿Qué es un motor paso a paso? Tipos, Construcción, Operación y Aplicaciones
Tipos de motores paso a paso:su construcción, funcionamiento y aplicaciones
La invención de tarjetas de controlador de motor paso a paso dedicadas y otras tecnologías de control digital para interconectar un motor paso a paso a los sistemas basados en PC son la razón de la gran aceptación de los motores paso a paso en los últimos tiempos. Los motores paso a paso se convierten en la opción ideal para los sistemas de automatización que requieren un control preciso de la velocidad o un posicionamiento preciso, o ambos.
Como sabemos que muchos motores eléctricos industriales se utilizan con control de retroalimentación de circuito cerrado para lograr un posicionamiento preciso o un control de velocidad preciso, por otro lado, un motor paso a paso capaz de operar en un controlador de lazo abierto. Esto, a su vez, reduce el costo total del sistema y simplifica el diseño de la máquina en comparación con el control del servosistema. Discutamos brevemente sobre motor paso a paso y sus tipos . 
- Publicación relacionada:Servomotor:tipos, construcción, funcionamiento y aplicaciones
¿Qué es un motor paso a paso?
Motor paso a paso es un dispositivo electromecánico sin escobillas que convierte el tren de pulsos eléctricos aplicados en sus devanados de excitación en una rotación del eje mecánico paso a paso definida con precisión. El eje del motor gira en un ángulo fijo para cada pulso discreto. Esta rotación puede ser lineal o angular. Obtiene un movimiento de paso para una sola entrada de pulso.
Cuando se aplica un tren de pulsos, se gira en un cierto ángulo. El ángulo a través del cual gira el eje del motor paso a paso para cada pulso se denomina ángulo de paso, que generalmente se expresa en grados.
La cantidad de pulsos de entrada dados al motor decide el ángulo de paso y, por lo tanto, la posición del eje del motor se controla controlando la cantidad de pulsos. Esta característica única hace que el motor paso a paso sea muy adecuado para el sistema de control de bucle abierto en el que la posición precisa del eje se mantiene con el número exacto de pulsos sin usar un sensor de retroalimentación.
Si el ángulo de paso es menor, mayor será el número de pasos por revolución y mayor será la precisión de la posición obtenida. Los ángulos de paso pueden ser tan grandes como 90 grados y tan pequeños como 0,72 grados, sin embargo, los ángulos de paso comúnmente utilizados son 1,8 grados, 2,5 grados, 7,5 grados y 15 grados.
La dirección de rotación del eje depende de la secuencia de pulsos aplicados al estator. La velocidad del eje o la velocidad promedio del motor es directamente proporcional a la frecuencia (la tasa de pulsos de entrada) de los pulsos de entrada que se aplican en los devanados de excitación. Por lo tanto, si la frecuencia es baja, el motor paso a paso gira en pasos y para alta frecuencia, gira continuamente como un motor de corriente continua debido a la inercia.
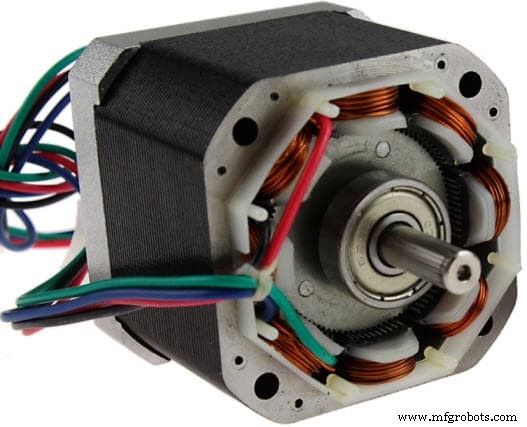
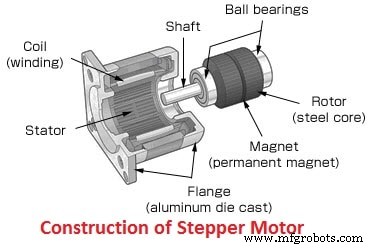
Como todos los motores eléctricos, tiene estator y rotor. El rotor es la parte móvil que no tiene devanados, escobillas y conmutador. Por lo general, los rotores son de reluctancia variable o de imán permanente. El estator a menudo se construye con devanados multipolares y multifásicos, generalmente de devanados trifásicos o cuádruples para un número requerido de polos decidido por el desplazamiento angular deseado por pulso de entrada.
A diferencia de otros motores, funciona con pulsos de control discretos programados que se aplican a los devanados del estator a través de un controlador electrónico. La rotación se produce debido a la interacción magnética entre los polos del devanado del estator energizado secuencialmente y los polos del rotor.
Existen varios tipos de motores paso a paso están disponibles en el mercado actual en una amplia gama de tamaños, cantidad de pasos, construcciones, cableado, engranajes y otras características eléctricas. Como estos motores son capaces de operar de forma discreta, son muy adecuados para interactuar con dispositivos de control digital como computadoras.
Debido al control preciso de velocidad, rotación, dirección y posición angular, estos son de particular interés en sistemas de control de procesos industriales, máquinas CNC, robótica, sistemas de automatización de fabricación y instrumentación.
- Publicación relacionada:Motor CC sin escobillas:construcción, principio de funcionamiento y aplicaciones
Tipos de motores paso a paso
Hay tres categorías básicas de motores paso a paso , a saber
- Motor paso a paso de imán permanente
- Motor paso a paso de reluctancia variable
- Motor paso a paso híbrido
En todos estos motores, los devanados de excitación se emplean en el estator, donde el número de devanados se refiere al número de fases.
Se aplica un voltaje de CC como excitación a las bobinas de los devanados y cada terminal de devanado se conecta a la fuente a través de un interruptor de estado sólido. Dependiendo del tipo de motor paso a paso, el diseño del rotor se construye como un rotor de acero suave con polos salientes, un rotor de imán permanente cilíndrico y un imán permanente con dientes de acero suave. Analicemos estos tipos en detalle.
- También puede leer:Conexión de motor trifásico estrella/triángulo (Y-Δ) marcha atrás/adelante con diagrama de control y potencia del temporizador
Motor paso a paso de reluctancia variable
Es el tipo básico de motor paso a paso que existe desde hace mucho tiempo y garantiza la manera más fácil de entender el principio de funcionamiento desde un punto de vista estructural. Como sugiere el nombre, la posición angular del rotor depende de la reluctancia del circuito magnético formado entre los polos del estator (dientes) y los dientes del rotor.

Construcción de un motor paso a paso de reluctancia variable
Consiste en un estator devanado y un rotor de dientes múltiples de hierro dulce. El estator tiene una pila de láminas de acero al silicio sobre las que se enrollan los devanados del estator. Por lo general, está bobinado para tres fases que se distribuyen entre los pares de polos.
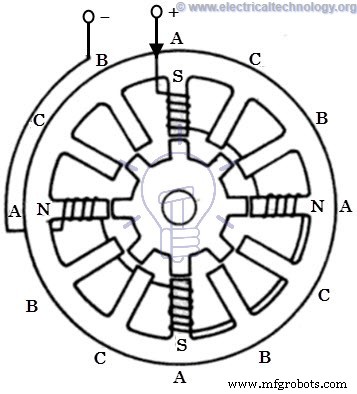
El número de polos en el estator así formado es igual a un múltiplo par del número de fases para las cuales los devanados están enrollados en el estator. En la figura a continuación, el estator tiene 12 polos salientes igualmente espaciados donde cada polo está enrollado con una bobina de excitación. Estas tres fases reciben energía de una fuente de CC con la ayuda de interruptores de estado sólido.
El rotor no tiene devanados y es del tipo de polo saliente hecho enteramente de láminas de acero ranurado. Los dientes proyectados del polo del rotor tienen el mismo ancho que los dientes del estator. El número de polos en el estator difiere del de los polos del rotor, lo que proporciona la capacidad de arranque automático y rotación bidireccional del motor.
La relación de los polos del rotor en términos de los polos del estator para un motor paso a paso trifásico es Nr =Ns ± (Ns / q). Aquí Ns =12 y q=3, y por lo tanto Nr =12 ± (12 / 3) =16 u 8. A continuación se ilustra un rotor de construcción de 8 polos sin ninguna excitación.
Funcionamiento del motor paso a paso de reluctancia variable
El motor paso a paso funciona según el principio que el rotor se alinee en una posición particular con los dientes del polo de excitación en un circuito magnético donde existe un camino de reluctancia mínimo. Cada vez que se aplica energía al motor y al excitar un devanado en particular, produce su campo magnético y desarrolla sus propios polos magnéticos.
Debido al magnetismo residual en los polos magnéticos del rotor, hará que el rotor se mueva en una posición tal que alcance la posición de reluctancia mínima y, por lo tanto, un conjunto de polos del rotor se alinea con el conjunto de polos energizados del estator. En esta posición, el eje del campo magnético del estator coincide con el eje que pasa por cualquiera de los dos polos magnéticos del rotor.
Cuando el rotor se alinea con los polos del estator, tiene suficiente fuerza magnética para evitar que el eje se mueva a la siguiente posición, ya sea en el sentido de las agujas del reloj o en el sentido contrario.
Considere el diagrama esquemático de 3 fases, 6 polos de estator y 4 dientes de rotor que se muestra en la figura a continuación. Cuando la fase A-A’ se alimenta con corriente continua cerrando el interruptor -1, el devanado se convierte en un imán lo que hace que un diente se convierta en el Norte y el otro en el Sur. Entonces, el eje magnético del estator se encuentra a lo largo de estos polos.
Debido a la fuerza de atracción, el polo norte de la bobina del estator atrae el diente de rotor más cercano de polaridad opuesta, es decir, el sur y el polo sur atraen el diente de rotor más cercano de polaridad opuesta, es decir, el norte. Luego, el rotor se ajusta a su posición de reluctancia mínima donde el eje magnético del rotor coincide exactamente con el eje magnético del estator.
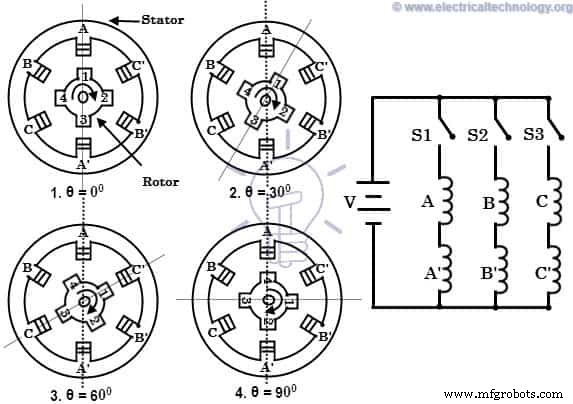
Cuando la fase B-B' está energizada por cerrando el interruptor -2 manteniendo la fase A-A' permanece desenergizada abriendo el interruptor-1, el devanado B-B' producirá el flujo magnético y por lo tanto el eje magnético del estator se desplaza a lo largo de los polos así formados por él. Por lo tanto, el rotor cambia a la menor reluctancia con los dientes del estator magnetizados y gira en un ángulo de 30 grados en el sentido de las agujas del reloj.
Cuando el interruptor 3 se energiza después de abrir el interruptor 2, la fase C-C' se energiza, los dientes del rotor se alinean con la nueva posición moviéndose a través de un ángulo adicional de 30 grados De esta manera, el rotor se mueve en el sentido de las agujas del reloj o en el sentido contrario a las agujas del reloj excitando sucesivamente los devanados del estator en una secuencia particular. El ángulo de paso de este motor paso a paso de dientes de rotor de 4 polos y 3 fases se expresa como 360/ (4 × 3) =30 grados (como ángulo de paso =360 / Nr × q).
El ángulo de paso se puede reducir aún más aumentando el número de polos en el estator y el rotor, en tal caso, los motores a menudo se enrollan con devanados de fase adicionales. Esto también se puede lograr adoptando diferentes construcciones de motores paso a paso tales como disposición multipila y mecanismo de reducción de engranajes.
- También puede leer:Conexión de motor trifásico ESTRELLA/TRIÁNGULO sin temporizador Diagramas de alimentación y control
Motor paso a paso de imán permanente
El motor de diseño de imán permanente es quizás el más común entre varios tipos de motores paso a paso. Como su nombre lo indica, agrega imanes permanentes a la construcción del motor. Este tipo de motores paso a paso también se conoce como motor can-stack. o motor de lata . La principal ventaja de este motor es su bajo coste de fabricación. Este tipo de motor tiene 48-24 pasos por revolución.

Motor paso a paso de imanes permanentes para la construcción
En este motor, el estator es multipolar y su construcción es similar a la del motor paso a paso de reluctancia variable como se mencionó anteriormente. Consiste en una periferia ranurada en la que se enrollan las bobinas del estator. Tiene polos proyectados sobre la estructura ranurada donde los devanados bobinados pueden ser bifásicos o trifásicos.
Los terminales finales de todos estos devanados se compran y se conectan a la excitación de CC a través de interruptores de estado sólido en el circuito de accionamiento.
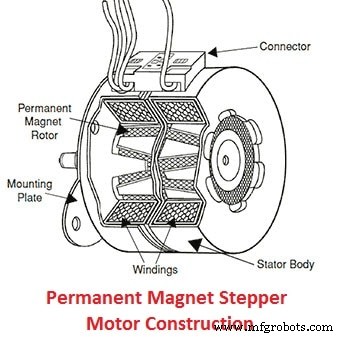
El rotor está hecho de un material de imán permanente como una ferrita que puede tener forma de polo cilíndrico o saliente, pero generalmente es de tipo cilíndrico liso. El rotor está diseñado para tener un número par de polos magnéticos permanentes con polaridades norte y sur alternas.
Funcionamiento del motor paso a paso de imanes permanentes
La operación de este motor funciona según el principio de que los polos opuestos se atraen y los polos iguales se repelen. Cuando los devanados del estator se excitan con un suministro de CC, se produce un flujo magnético y se establecen los polos norte y sur. Debido a la fuerza de atracción y repulsión entre los polos del rotor de imanes permanentes y los polos del estator, el rotor comienza a moverse hasta la posición para la cual se envían pulsos al estator.
Considere un motor paso a paso de 2 fases con dos polos de rotor magnético permanente como se muestra en la figura a continuación.
Cuando la fase A se energiza con un positivo con respecto a la A', los devanados establecen los polos Norte y Sur. Debido a la fuerza de atracción, los polos del rotor se alinean con los polos del estator de manera que el eje del polo magnético del rotor se ajusta con el del estator como se muestra en la figura.
Cuando la excitación se cambia a la fase B y se apaga la fase A, el rotor se ajusta aún más al eje magnético de la fase B y, por lo tanto, gira 90 grados en el sentido de las agujas del reloj.
Luego, si la fase A se energiza con una corriente negativa con respecto a A', la formación de polos en el estator hace que el rotor se mueva otros 90 grados en el sentido de las agujas del reloj.
De la misma manera, si la fase B se excita con corriente negativa al cerrar el interruptor de la fase A, el rotor gira otros 90 grados en la misma dirección. A continuación, si la fase A se excita con corriente positiva, el rotor vuelve a la posición original realizando así una revolución completa de 360 grados. Esto implica que, cada vez que se excita el estator, el rotor tiende a girar 90 grados en el sentido de las agujas del reloj.
El ángulo de paso de este motor de rotor de imán permanente de 2 polos y 2 fases se expresa como 360/ (2 × 2) =90 grados. El tamaño del paso se puede reducir energizando dos fases simultáneamente o una secuencia de modos de ENCENDIDO monofásico y ENCENDIDO bifásico con una polaridad adecuada.
- También puede leer:Términos y definiciones relacionados con el control y la protección de motores
Hybrid Stepper Motor
It is the most popular type of stepper motor as it provides better performance than permanent magnet rotor in terms of step resolution, holding torque and speed. However, these motors are more expensive than PM stepper motors. It combines the best features of both variable reluctance and permanent magnet stepper motors. These motors are used in applications that require very small stepping angle such as 1.5, 1.8 and 2.5 degrees.

Construction of Hybrid Stepper Motor
The stator of this motor is same as its permanent magnet or reluctance type counterpart. The stator coils are wound on alternate poles. In this, the coils of different phases are wound on each pole, usually two coils at a pole which is referred as a bifilar connection.
The rotor consists of a permanent magnet which is magnetized in axial direction to create a pair of magnetic poles (N and S poles). Each pole is covered with uniformly spaced teeth. The teeth are made up of soft steel and two section, of which on each pole are misaligned each other by a half-tooth pitch.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
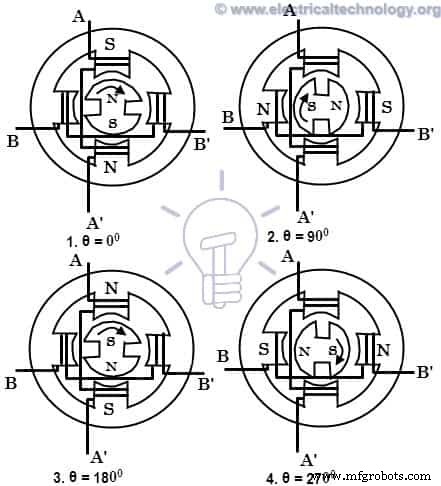
This motor works similar to that of permanent magnet stepper motor. The figure above shows 2-phase, 4-pole, 6-tooth rotor hybrid stepper motor. When the phase A-A’ is excited with a DC supply, keeping B-B’ unexcited, the rotor aligns such that the south pole of the rotor faces north pole of the stator while north pole of rotor faces south pole of the stator.
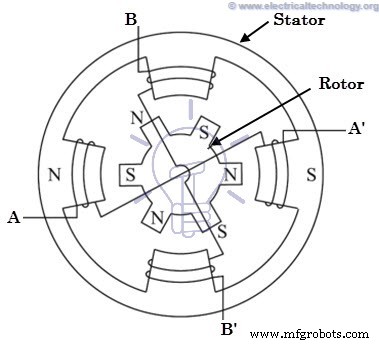
Now, if the phase B-B’ is excited, keeping A-A’ switched off in such a way that upper pole becomes north and lower becomes south, then the rotor will align to a new position by moving through counterclockwise direction. If the phase B-B’ is oppositely excited such that the upper pole becomes south and lower becomes north, then the rotor will turn clockwise direction.
By a proper sequence of pulses to the stator, the motor will turn in desired direction. For every excitation, rotor will get locked into new position, and even if excitation is removed motor still maintains its locked condition due to the permanent magnet excitation. The step angle of this 2-phase, 4-pole, 6-tooth rotor motor is given as 360/ (2 × 6) =30 degrees. In practice, hybrid motors are constructed with more number of rotor poles in order to get high angular resolution.
- Related Post:What is Motor Efficiency &How to improve it?
Unipolar and Bipolar Stepper Motors
The above discussed motors can be unipolar or bipolar based on the coil winding arrangements. A unipolar motor is employed with two windings per phase and hence the direction of current flow through these windings changes the rotation of the motor. In this configuration, the current flow is through one direction in one coil and opposite direction in another coil.
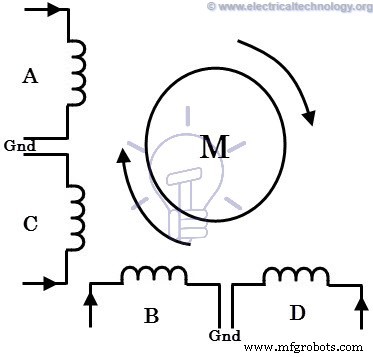
The figure below shows 2-phase unipolar stepper motor wherein A and C coils are for one phase and B and D are for other phase. In each phase each coil carries current in opposite direction to that of other coil. Only one coil will be carrying current at a time in each phase for achieving particular direction of rotation. So just by switching the terminals to each coil, the direction of rotation is controlled.
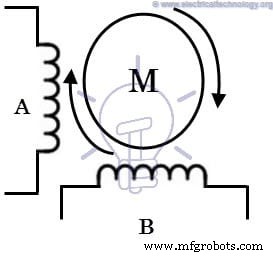
In case of a bipolar stepper motor, each phase consists of a single winding rather than two in case of unipolar one. In this, the direction of rotation is controlled by reversing the current through the windings. Hence, it requires a complex drive circuit for current reversal.
- You may also read:What is a Solenoid and Solenoid Magnetic Field
Stepping Modes of a Stepper Motor
A typical stepping action causes the motor to step through a sequence of equilibrium positions in response to current pulses given to it. It is possible to vary the stepping action in different ways simply by changing the sequence through which stator windings are energized. The following are the most common operating or driving modes of stepper motors.
- Wave step
- Full step
- Half step
- Microstepping
Wave Step Mode
Wave step mode is the simplest of all other modes in which only one winding is energized at any given time. Each coil of the phase is connected to the supply alternatively. The table below shows the order through which coils are energized in a 4-phase stepper motor.
In this mode motor gives maximum step angle compared to all other modes. It is the simplest and most commonly used mode for stepping; however the torque produced is less as it uses some part of the total winding at a given time. 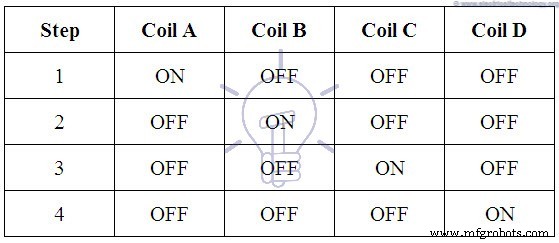
Full Step Mode
In this drive or mode, two stator phases are energized simultaneously at any given time. When two phases are energized together, the rotor will experience the torque from both phases and comes to the equilibrium position, which will be interleaved between two adjacent wave step positions or 1-phase excitations. So this step provides better holding torque than wave step. The table below shows the full step drive for 4-phase stepper motor. 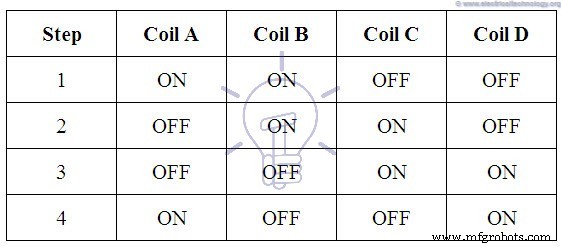
Half Step Mode
It is the combination of both wave and full step modes. In this, single phase and dual phase excitations are carried out alternatively, i.e., one-phase ON, two-phases ON, and so on. The step angle in this mode becomes half of the full step angle. This drive mode has highest torque and stability compared to all other modes. The table containing phase pulsing sequence for a 4-phase motor in half stepping is given below. 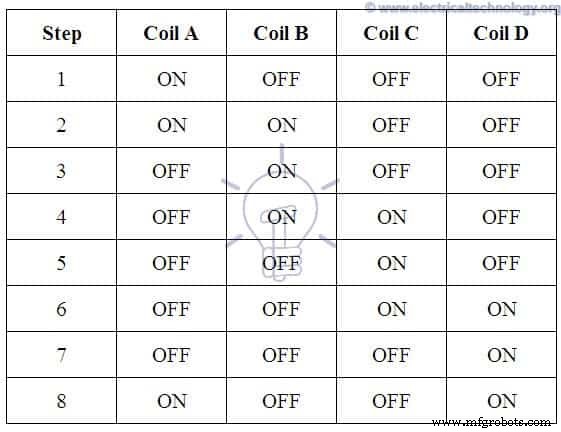
Microstepping Mode
In this mode, each motor step is subdivided into several small steps, even hundreds of fixed positions, therefore a greater positioning resolution is obtained. In this, currents through the windings are continually varied in order to get very small steps. In this, two phases are excited simultaneously, but with the unequal currents in each phase.
For example, the current through phase -1 is held constant while the current through phase-2 is incremented in steps till the maximum value of current, whether it is negative or positive. The current in the phase-1 is then decreased or increased in steps till zero. Thus, the motor will produce a small step size.
All these stepping modes can be obtained by each type of stepper motor discussed above. However, the direction of current in each winding during these steps can be varied depending on the type of motor and either it is unipolar or bipolar.
- Related Post Cable Size Calculation for LT &HT Motors
Advantages of Stepper Motor
- At standstill position, the motor has full torque. No matter if there is no moment or changing position.
- It has a good response to starting, stopping and reversing position.
- As there is no contact brushes in the stepper motor, It is reliable and the life expectancy depends on the bearings of the motor.
- The motor rotation angle is directly proportional to the input signals.
- It is simple and less costly to control as motor provides open loop control when responding to the digital input signals.
- The motor speed is directly proportional to the input pulses frequency, this way a wide range of rotational speed can be achieved.
- When load is coupled to the shaft, it is still possible to realize the synchronous rotation with low speed.
- The exact positioning and repeatability of movement is good as it has a 3-5% accuracy of a step where the error is non cumulative from one step to another.
- Stepper motors are safer and low cost (as compared to servo motors), having high torque at low speeds, high reliability with simple construction which operates at any environment.
Disadvantages of Stepper Motors
- Stepper motors having low Efficiency.
- It has low Accuracy.
- Its torque declines very quickly with speed.
- As stepper motor operates in open loop control, there is no feedback to indicate potential missed steps.
- It has low torque to inertia ratio means it can’t accelerate the load very quickly.
- They are noisy.
Applications of Stepper Motors
- Stepper motors are used in automated production equipments and automotive gauges and industrial machines like packaging, labeling, filling and cutting etc.
- It is widely used in security devices such as security &surveillance cameras.
- In medical industry, stepper motors are widely used in samples, digital dental photography, respirators, fluid pumps, blood analysis machinery and medical scanners etc.
- They are used in consumer electronics in image scanners, photo copier and printing machines and in digital camera for automatic zoom and focus functions and positions.
- Stepper motors also used in elevators, conveyor belts and lane diverters.
También puede leer:
- DC Drives – Construction, Working &Classification of Electrical DC Drives
- Three Phase Motor Power &Control Wiring Diagrams
- Electric Motors Library (AC &DC )
Tecnología Industrial
- ¿Qué es la impresión 3D? Principio de funcionamiento | Tipos | Aplicaciones
- ¿Qué es el estampado? - Tipos, operación y aplicación
- ¿Qué es tornear?- Definición y tipos de operaciones
- ¿Qué es la soldadura? - Definición | Tipos de soldadura
- ¿Qué es Casting?- Definición| Tipos de fundición
- ¿Qué son los martillos de potencia? - Tipos, diseño y funcionamiento
- ¿Para qué se utiliza Monel?
- ¿Cuáles son los diferentes tipos de construcción de sótanos?
- ¿Qué es un lomo fuerte?
- ¿Qué es un motor lineal?
- ¿Qué es un servomotor?