


Lazos de control:abiertos frente a cerrados
 El circuito de control de retroalimentación es probablemente la herramienta más innovadora y confiable en el campo de la ingeniería de control. Los bucles de control en su conjunto son eficientes herramientas para determinar problemas y problemas en un sistema, alcanzar valores de punto de ajuste en procesos y mantener la estabilidad de un sistema. Hay tres tipos principales de sistemas de lazo de control:lazo cerrado, lazo abierto y lazo abierto y cerrado combinados. El circuito cerrado se basa más en la retroalimentación, mientras que el circuito abierto no. Combined utiliza tanto la retroalimentación como la retroalimentación para estabilizar un proceso.
El circuito de control de retroalimentación es probablemente la herramienta más innovadora y confiable en el campo de la ingeniería de control. Los bucles de control en su conjunto son eficientes herramientas para determinar problemas y problemas en un sistema, alcanzar valores de punto de ajuste en procesos y mantener la estabilidad de un sistema. Hay tres tipos principales de sistemas de lazo de control:lazo cerrado, lazo abierto y lazo abierto y cerrado combinados. El circuito cerrado se basa más en la retroalimentación, mientras que el circuito abierto no. Combined utiliza tanto la retroalimentación como la retroalimentación para estabilizar un proceso.
El siguiente diagrama ilustra todo el ciclo de control de retroalimentación:
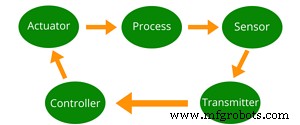
Dividiendo esto, obtenemos:
- El proceso que debe controlarse
- Un sensor que mide el parámetro físico del proceso
- Un transmisor que convierte la información sensorial a través de señales electrónicas
- Un controlador que compara la señal y el punto de ajuste
- Un actuador que realiza un esfuerzo correctivo en respuesta a la señal enviada por el controlador
En un sistema de control de circuito cerrado, la secuencia se repite hasta que se alcanza el punto de referencia. Algunos ejemplos comunes son el termostato para la temperatura del horno o el control de crucero en un automóvil. Pero esto no significa que todas las operaciones automáticas requieran retroalimentación para funcionar correctamente. Las configuraciones de bucle abierto, que asumen que la secuencia solo se necesita una vez, pueden servir para varias operaciones sin necesidad de confirmaciones constantes mediante retroalimentación.
Tipos de control de circuito cerrado
Control continuo de circuito cerrado
No todos los procesos de ciclo cerrado son iguales. Para un proceso de control continuo, el circuito de retroalimentación mantiene el valor de la variable de control establecido por el usuario, también llamado punto de referencia. El controlador lleva a cabo una simple resta de la última medición sensorial del punto de referencia. La magnitud del resultado determina el esfuerzo correctivo que sería aplicado por el controlador, a través del actuador.
Por ejemplo, un automóvil cuyo control de crucero está activado usaría el velocímetro como sensor para medir su velocidad. Si la velocidad es inferior al valor establecido, el controlador acelera el automóvil alimentando más combustible. Si el automóvil viaja demasiado rápido, la entrada de combustible se reduce proporcionalmente. Este proceso de medir-decidir-actuar continúa hasta que la velocidad del automóvil alcanza el punto de ajuste.
Control discreto de circuito cerrado
Con el control continuo de lazo cerrado, la variable de interés se mide en todo momento, pero con los sistemas de control discretos, un evento desencadenante daría como resultado la secuencia medir-decidir-actuar. Por ejemplo, los humanos usan sus ojos para determinar el estado de la luz ambiental en el exterior antes de conducir y si encender o no las luces delanteras. No se requieren más ajustes hasta que se produzca un evento desencadenante, como una instancia de nubosidad intensa o el inicio del próximo viaje.
Los bucles de retroalimentación discretos son mucho más simples que los continuos porque no involucran monitoreo continuo o problemas como sobreimpulsos bruscos. Se obtienen resultados instantáneos cuando se encienden los faros en comparación con los resultados graduales con el control de crucero.
Control de bucle abierto
Como se mencionó anteriormente, los controladores de lazo abierto asumen que el punto de referencia se logrará de una sola vez y aplican un solo esfuerzo de control cuando se produce el disparo. Estos controladores también pueden tener la opción de medir los resultados. Por ejemplo, ¿arrancó o se detuvo el motor? Estas mediciones son principalmente por consideraciones de seguridad y no forman parte de la secuencia.
Ocasionalmente, un controlador de lazo cerrado puede funcionar como uno de lazo abierto debido a una falla del sensor o a que un operador lo tome manualmente. El operador debe intervenir cuando un controlador de retroalimentación no puede mantener su estabilidad. Por ejemplo, es posible que un controlador de presión enérgico no pueda compensar adecuadamente una caída en la presión de la línea, lo que da como resultado oscilaciones y excesos frecuentes. En estos casos, el operador debe tomar el control manualmente para estabilizar el sistema.
También hay varios procesos para los cuales los controles estables son demasiado difíciles de configurar, lo que requiere que los operadores experimentados se hagan cargo con mucha frecuencia. Los operadores pueden usar su experiencia para manipular las entradas del proceso y mantener el punto de referencia deseado mucho más rápido que el controlador. Pero esta no es la situación ideal con el uso de bucles de control. Entonces, ¿qué sucedería si se combinaran los controles de circuito abierto y cerrado?
Combinación de controles de bucle abierto y cerrado
El control de bucle abierto conlleva el inconveniente de la imprecisión, ya que al eliminar la parte de retroalimentación también se elimina la garantía del esfuerzo de control que realiza el esfuerzo de control necesario. Controles de bucle abierto y cerrado se pueden combinar para formar una estrategia de avance si se requiere velocidad y precisión en paralelo.
Un controlador feedforward se basa en un modelo matemático del proceso para que todos los esfuerzos de control sean similares a los de un ingeniero experimentado que opera en modo manual. Mide los resultados de los esfuerzos de un circuito abierto inicial y aplica correcciones adicionales para eliminar errores y alcanzar el punto de referencia. Este tipo de controlador es útil cuando los sensores correctos están disponibles para medir una gran cantidad de criterios. Si se puede predecir su efecto futuro, entonces el controlador puede tomar medidas preventivas para garantizar que el error se elimine en un tiempo mínimo.
Por ejemplo, si un automóvil está equipado con un radar y control de crucero, podría ver una colina que se acerca y acelerar para compensar la fuerza adicional requerida para subir la colina. Sin el aviso previo, el control de crucero nunca sabría que necesita acelerar, lo que lleva a que el circuito cerrado aplique esfuerzos correctivos hasta que se alcance nuevamente el punto de ajuste.
Cada tipo de lazo de control tiene sus aplicaciones. El control de lazo abierto es más adecuado para situaciones en las que el punto de ajuste se puede lograr de una sola vez. Los controles de circuito cerrado son mejores para situaciones que requieren prueba y error para alcanzar el punto de referencia. Y el control combinado de bucle abierto y cerrado requiere modelos matemáticos y, a veces, sensores para funcionar correctamente. La gama de opciones permite a los operadores elegir adecuadamente el lazo de control correcto para sus necesidades.
El papel de la protección para garantizar la durabilidad de la máquina
Cómo clasificar los controladores
Sistema de control de automatización
- Bucles bloqueados en fase
- Circuitos de control
- Letrero de Makerspace abierto / cerrado de Neon A Shop en Raspberry Pi 2 (El Paso, TX)
- Abrir CV Robot
- Mejores formas de solucionar problemas de bucles de control de procesos y automatización
- Beneficios de la convergencia del control industrial
- Crecimiento del mercado de control de bajo voltaje
- Sobrevivir a un proyecto de migración del sistema de control
- Conocimiento de los paneles de control industriales
- Conceptos básicos de diseño del panel de control
- Paneles de control que ahorran espacio