


Blog invitado:Charles Guan se prepara para arriba (y abajo) con Markforged
Este blog invitado está escrito por Charles Guan, un graduado de Ingeniería Mecánica del MIT y ex instructor de diseño y taller de maquinaria del MIT. También es el creador del robot Overhaul en los BattleBots de ABC, que se transmitirá este verano los jueves a las 8 p.m. Este / 7 p.m. Centro. Trabaja como consultor de ingeniería en robótica y transporte, y está patrocinado por Markforged para competir en BattleBots. Visite su sitio web y Equals Zero Robotics.
Algunos antecedentes de robots de combate

En el mundo de las peleas de robots, hay un par de diseños básicos que sueles ver todo el tiempo:cuñas, aletas, martillos, rotores giratorios, etc. Al igual que el Pokémon legendario, algunos diseños son "santos griales", raramente vistos y aún más raramente bien ejecutados en la arena. El "flipper del volante" es uno de esos. Por lo general, sus brazos para voltear a alta velocidad, que son los que se ven lanzando a los oponentes varios pies en el aire, son neumáticos. Pero la neumática, si bien es densa en energía, no es densa en energía, e incluso los mejores aletas obtienen menos de una docena de buenos tiros antes de que literalmente se queden sin gasolina. El flipper del volante eléctrico combina la alta densidad energética de las baterías con la alta disponibilidad de la energía cinética del volante.
Canalizar esta energía en una forma rápidamente liberable, pero controlable, ha sido difícil de alcanzar. Los desafíos de diseño incluyen un mecanismo de participación confiable, sincronización constante, aceleración gradual y un vínculo sólido con el fin del negocio. Echa a perder cualquiera de estos y bien podrías haber construido una granada de energía cinética.
Solo se han hecho unos pocos ejemplos en toda la historia de las peleas de robots. En el extremo pequeño, está la serie de robots de clase de 3 a 30 libras de Zac O'Donnell, incluido su robot Magneato, y los diseños relativamente exitosos de Dale Heatherington. Para los grandes bots, Warrior ha sido el punto de referencia.

Si se da cuenta, cada uno de estos bots utiliza un enfoque de diseño y un mecanismo final diferentes. Esto ilustra el nivel de exploración que ha tenido el diseño en la comunidad; Los diseños de robots tienden a crecer por igual a medida que los constructores encuentran una solución localmente óptima, por lo que un diseño de arma con varios medios para el fin es todavía indómito.
Durante algunos años, había estado buscando una solución compacta y coaxial para el problema que se pudiera montar en línea con un "volante puntiagudo" (un tambor o disco giratorio con dientes) y conectarlo a un mecanismo en el otro lado de el robot. Eso lo convierte en un robot de doble arma con muchas posibilidades estratégicas. Así que pensé que tomaría la temporada baja entre los torneos de BattleBots para seguir con esta idea en un pequeño robot de 3 libras, mantener afiladas mis habilidades de diseño y ayudar a encontrar otra solución para la comunidad. ¿Por qué un robot de clase de 3 libras? ¡Porque es un tamaño fácil con el que puede imprimir utilizando un Mark Two!

Diseño del mecanismo de engranajes impreso en 3D
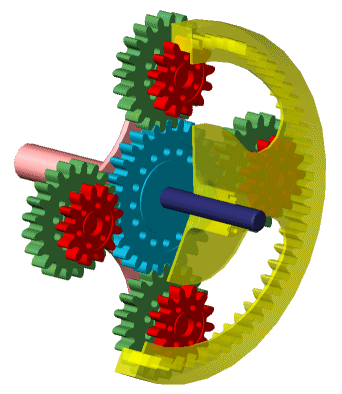
Los requisitos incluyen empaquetar una relación de engranajes muy alta (del orden de 20 o más a 1) en un volumen coaxial y encontrar una manera de activar esa reducción de engranajes solo cuando sea necesario. Investigué los sistemas de engranajes planetarios conocidos como trenes de engranajes epicíclicos compuestos, sacando varios libros de referencia, incluido el venerable “Libro de consulta sobre mecanismos y dispositivos mecánicos” y recorriendo Internet en busca de documentos técnicos de diseño. En resumen, esto permite la creación de relaciones de transmisión extremadamente altas en el mismo volumen que una caja de cambios planetaria simple al aprovechar la velocidad relativa de dos engranajes de anillo de tamaños ligeramente diferentes.
Después de un breve período diseñando embragues de perro deslizantes personalizados y bandas de fricción, me di cuenta de que solo estaba diseñando mi propia transmisión automática. Las cosas complicadas no suelen durar mucho en la batalla, así que tuve que pensar en otra forma de utilizar este sistema de reducción de engranajes. La solución consistía en utilizar el juego de engranajes como dispositivo de división del par. Es posible que conozca esto como "Hybrid Synergy Drive" de Toyota o bajo cualquier otro nombre de marca registrada de transmisión infinitamente variable. Este descubrimiento se produjo, como muchos en la historia, por accidente:estaba girando mi modelo CAD y descubrí que anclar una corona hacía que la otra aún girara, y viceversa. Había olvidado que "velocidad relativa" significaba que una de esas velocidades puede ser cero.
Emocionado, rápidamente modelé un engranaje de anillo de juguete y un conjunto de engranajes planetarios, y lo imprimí usando Onyx en un Mark Two. Onyx es el único material en el que confiaba que sería lo suficientemente fuerte y rígido. Estaba limitado en el tamaño de los dientes de los engranajes que podía usar debido al pequeño tamaño del robot; los dientes normales de nailon habrían sido demasiado flexibles. Así que quería usar el modelo de juguete para que también fuera un indicador de tolerancia para el producto final en caso de que tuviera que hacer cambios dimensionales menores. El modelo confirmó mi hipótesis de que solo necesitaba detener repentinamente una marcha usando cualquier método:con el freno, con el embrague o simplemente con un palo a través de los radios de la rueda de la bicicleta, ¡y el otro anillo se ve obligado a girar!

Preparado para el combate de robots
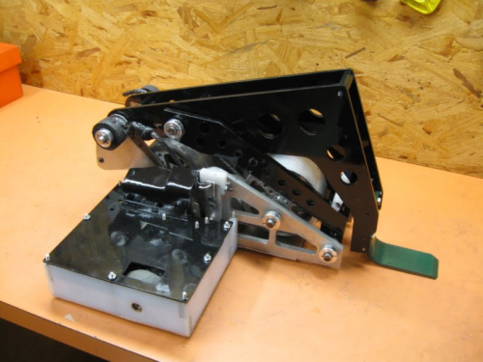
El trabajo en el robot comenzó entonces en serio. Saqué algunos de mis bocetos de ideas de hace mucho tiempo y decidí simplemente optar por un modelo CAD de "primer paso" para comprender el concepto y trabajar en las necesidades de diseño individuales a partir de ahí. Para resumir la historia, aquí hay una foto del diseño tal como está ahora.
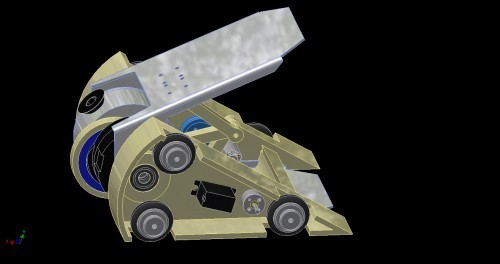
Entonces, ¿qué está pasando aquí? Tiene un cuerpo triangular que es invertible - no hay "al revés" para hablar. El objeto plateado redondo de la izquierda es un rotor de aluminio de 8 onzas con tornillos de cabeza hueca como "dientes", que es una táctica común en esta pequeña categoría de peso para armas giratorias. El mecanismo planetario está modelado en negro (para Onyx), y un servomotor empujará un diente deslizante hacia la corona dentada con muescas cuando se le ordene, lo que obligará a dejar de girar y a la otra corona a arrancar. Esta corona tiene un lóbulo de leva desplazado con una biela a un "enlace de mariposa" que fuerza las alas de metal superior e inferior a separarse a medida que gira la leva. Las alas de metal se articulan en un punto común, por lo que una reaccionará contra el suelo mientras la otra empuja hacia arriba lo que esté sobre ella en ese momento.
Hay detalles y problemas geométricos que aún deben resolverse antes de que se complete este diseño, pero ahora confío en el concepto. Tiene sus desventajas:por ejemplo, si el diente deslizante se atasca, el mecanismo estará siempre encendido y el robot podría perder movilidad. Si seca los fuegos sin peso en las alas, probablemente se subirá al techo. Pero ver que las deficiencias de tu diseño se hacen muy visibles es parte de la diversión del deporte, ¡así que espero ver lo que sucederá con este bot!
Aquí hay una demostración del sistema:
Y aquí hay algunas imágenes más del diseño:


Fotos cortesía de Charles Guan.
Impresión 3d
- Entrevista con un experto:Ibraheem Khadar de Markforged
- Plantillas y accesorios:6 formas de mejorar la eficiencia de la producción con la impresión 3D
- Cree su robot de transmisión de video controlado por Internet con Arduino y Raspberry Pi
- Abajo el mantenimiento. Mejore la confiabilidad.
- Diseñe y fabrique más rápido con Formlabs y Fusion 360
- Stratasys se asocia con GrabCAD y e-Xstream
- Corrección del caos con SOLIDWORKS y MakerBot
- Rostro primero:Protección nasal de Kevlar® con Markforged
- Dominaciones forjadas en combate de robots
- Navegando por aguas turbulentas con Markforged
- Recoger y colocar:un ejemplo perfecto del uso de robots con EasyWork