


El diseño de referencia simplifica el control de motores robóticos industriales
Un nuevo diseño de referencia acelera el desarrollo de herramientas de fin de brazo para Robótica industrial que utiliza un módulo controlador / servocontrolador de eje único con control de movimiento integrado.
Trinamic, ahora parte de Maxim Integrated, demostró una gama de soluciones de control de potencia a la vanguardia de APEC, incluidas sus últimas soluciones que simplifican el desarrollo de herramientas de fin de brazo (EoAT) para robótica industrial y el servocontrolador de un solo eje. controlador con control de movimiento integrado. En una entrevista con Power Electronics, Jeff DeAngelis, vicepresidente de comunicaciones industriales de Maxim Integrated, así como Jonas Proeger, director de gestión empresarial, y Stephan Kubisch, director de definición de productos, ambos en Trinamic, destacaron estas últimas soluciones que aceleran el tiempo de desarrollo en varias aplicaciones de automatización industrial.
El diseño de referencia de código abierto TMCM-1617-GRIP-REF integra un controlador de hardware orientado al campo (FOC) y tres puertos de comunicación. Incluye el IC de grado industrial MAX22000 de Maxim Integrated, el transceptor IO-Link MAX22515, una E / S analógica de alta precisión configurable por software y el MAX14906, una E / S digital de cuatro canales que se utiliza para configurar el modo de funcionamiento del servoaccionamiento de eje.
El nuevo módulo de controlador / servocontrolador TMCM-1321 está destinado a optimizar el rendimiento de los motores paso a paso bipolares de dos fases optimizando la velocidad y sincronización del eje y reduciendo las pérdidas de potencia. Maxim Integrated señaló que el dispositivo integra un codificador magnético y entradas digitales para codificadores ópticos para simplificar el servocontrol con retroalimentación y diagnósticos avanzados.
Plataforma de código abierto
“El beneficio del diseño de referencia TMCM-1617-GRIP-REF es su capacidad para integrar varios circuitos en una placa que normalmente se distribuiría entre varias placas o componentes al final de un brazo robótico. Esta huella compacta combina una interfaz de bus de comunicación simplificada que reduce la carga del cableado y proporciona una forma simplificada de mover datos y energía a través de un par de cables único o doble, así como la capacidad de poner en servicio la herramienta correctamente. Este tamaño compacto y una interfaz de bus de comunicación y configuración simplificada se combina con nuestro entorno de desarrollo de software TMCL-IDE, lo que lo convierte en un diseño de referencia muy versátil para herramientas de fin de brazo ”, dijo DeAngelis. Añadió que “además de su tamaño compacto, otro factor importante que se consigue son los muy ligeros 24 gramos de peso de este módulo”.
Como describió Proeger, el diagrama de bloques de la figura 1 muestra una celda de carga para detectar la fuerza que proviene del brazo o de la pinza, o sensor de proximidad. TMCM-1617-GRIP-REF admite los protocolos de comunicación industrial EtherCAT, IO-Link y RS-485, y proporciona una señal analógica y entradas / salidas digitales programables por software y se puede configurar utilizando el entorno de desarrollo integrado del lenguaje de control de movimiento Trinamic (TMCL- IDE). “Ofrecemos la opción de comunicación RS-485 con 100 megabits por segundo, que sigue siendo popular. La ventaja es que sigue siendo un cableado tradicional de alta velocidad para satisfacer las demandas de esta aplicación. Es un producto muy flexible desde la perspectiva de la comunicación como un enfoque más tradicional para controlar el motor ", dijo Proeger.
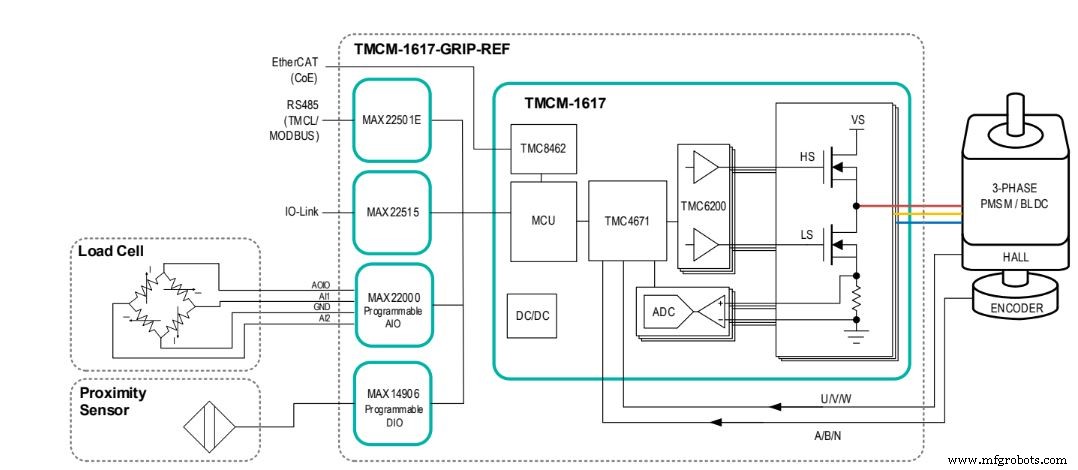
Figura 1:Diagrama de bloques de TMCM-1617-GRIP-REF (Fuente:Maxim Integrated)
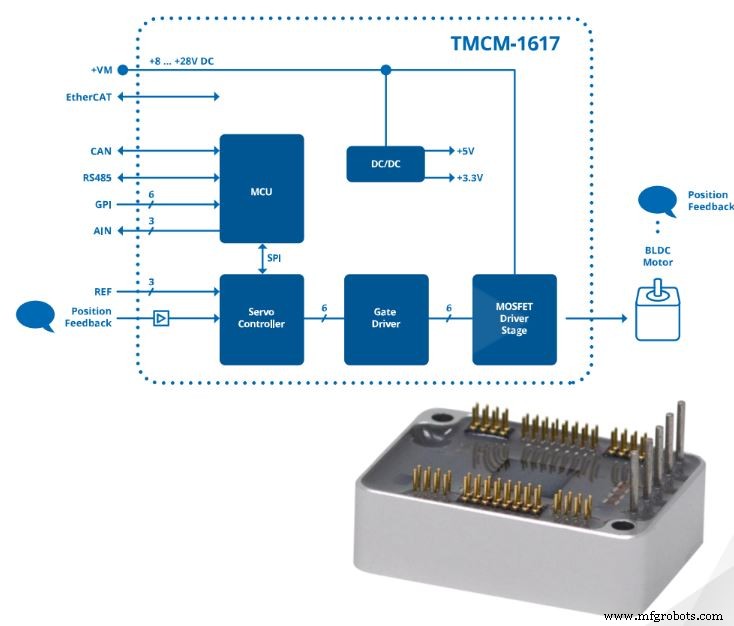
Figura 2:TMCM-1617 - Servocontrolador más pequeño (Fuente:Maxim Integrated)
“Proporcionamos todos los rieles de suministro necesarios para admitir sensores y periféricos externos sin necesidad de una fuente de alimentación adicional”, dijo Kubisch. Añadió que "el control de corriente perfecto tiene el mayor impacto en la eficiencia general del sistema".
Con arquitecturas de bus de última generación, combinadas con control y diagnóstico integrados en una sola solución, Maxim Integrated cree que el diseño de referencia puede aumentar la productividad en la fábrica y llevar la inteligencia artificial al límite. Por ejemplo, el MAX22515 incluye características como una amplia protección integrada para garantizar una comunicación sólida en entornos industriales hostiles. Todos los pines de la interfaz de línea IO-Link (V24, C / Q, DI y GND) están protegidos contra voltaje inverso, protegidos contra cortocircuitos, protegidos contra conexión en caliente y cuentan con protección integrada contra sobretensiones de ± 1.2kV / 500Ω.
Para el futuro del control de motores y movimiento, la creciente complejidad en relación con la demanda de máxima confiabilidad conducirá a una mayor inteligencia del sistema, y esto debe estar en el borde, descentralizado. Las decisiones deben tomarse en tiempo real, los datos deben recopilarse en la fuente y compartirse en la nube.
Servocontrolador / controlador TMCM-1321
El TMCM-1321 es un controlador / controlador de un solo eje para motores paso a paso bipolares de 2 fases con un codificador magnético integrado y entradas digitales, todos ofrecen lógica de control de bucle cerrado para optimizar el control del motor.
Maxim Integrated señaló que el factor de forma está destinado a ser significativamente más pequeño que otras soluciones, y la placa admite micropasos de 256x con la operación sin ruido. El codificador magnético integrado se puede utilizar cuando se conecta un imán adecuado al eje del motor, lo que permite el funcionamiento en bucle cerrado. Alternativamente, se puede conectar un codificador óptico a través de las entradas digitales ABN. Se pueden seleccionar diferentes formas de rampa. Además de la rampa lineal y la rampa Trinamic SixPoint ™, el módulo TMCM-1321 implementa una rampa en forma de S que puede acelerar el tiempo de transferencia real.
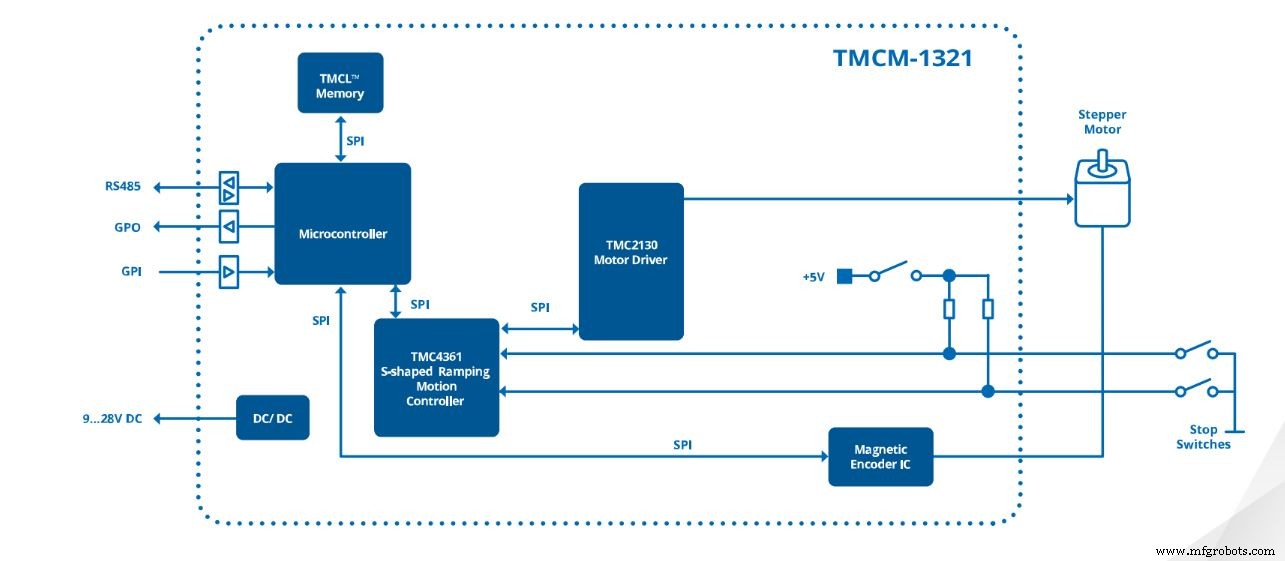
Figura 3:Diagrama de bloques de TMCM-1321 (Fuente:Maxim Integrated)

Figura 4:Placa TMCM-1321 (Fuente:Maxim Integrated)
El TMCM-1321 ha sido diseñado para corrientes de bobina de hasta 0,7 A RMS y tensión de alimentación de 24 V CC. Se pueden usar tres entradas digitales como entradas de interruptor final y interruptor de inicio o como entradas de propósito general.
El control de motores y accionamientos son fundamentales en muchas aplicaciones, ya que permiten obtener un alto grado de precisión, lo que a su vez se traduce en menores costos y mayor eficiencia. La función vital realizada por un circuito de control de motor es asegurar que el rotor tome, durante diferentes condiciones de operación y carga, una posición precisa con respecto a los devanados, para determinar su ubicación con un grado suficiente de precisión.
>> Este artículo se publicó originalmente en nuestro sitio hermano, Power Noticias de electrónica.
Contenidos relacionados:
- Diseño de controles de motor para sistemas robóticos
- Haciendo robots con Ada, Parte 2:Manejando los motores
- Resolver desafíos deterministas de diseño de control de motores de ejes múltiples
- El software facilita el diseño del controlador del motor BLDC
- Los kits de desarrollo ofrecen plataformas para diseños de control de motores con alimentación digital
- Diseño de un sistema de retroalimentación de reacción rápida para diseños impulsados por motores miniaturizados
Para obtener más información sobre Embedded, suscríbase al boletín informativo semanal por correo electrónico de Embedded.
Incrustado
- Renesas amplía las opciones de microcontroladores para el servocontrol en robots industriales
- El módulo de interfaz simplifica el diseño de WI-Fi 6
- Diseño de controles de motor para sistemas robóticos
- El controlador del motor integra el núcleo Arm Cortex-M0
- Los controladores integrados facilitan el diseño del motor paso a paso
- El diseño de referencia admite cargas de trabajo de IA que consumen mucha memoria
- Beneficios de la convergencia del control industrial
- Conocimiento de los paneles de control industriales
- Conceptos básicos de diseño del panel de control
- ¿Qué es la creación de prototipos de diseño industrial?
- Acerca de Motores Industriales y Aplicaciones