


¿Qué es una muñeca robótica? Una guía definitiva
En la industria manufacturera, a menudo encontrará robótica que automatiza diferentes procesos. Esta robótica es útil para agilizar los procesos de una empresa y también reducir los riesgos de lesiones. La mayoría de la robótica que se presenta en estas empresas son brazos robóticos que se utilizan en pick &place, ensamblaje y empaque, entre otros. Cuando se trata de estos brazos robóticos, hay algunos aspectos que debes tener en cuenta. Uno de ellos es la muñeca del robot que aparece en un brazo robótico. La mayoría de la gente no sabe mucho sobre esta parte crucial del brazo robótico. En este breve artículo, expondremos más sobre qué es y qué implica. Fuente:www. k-and-s.com
Cuando trabaja con un brazo robótico, tiene dos componentes importantes que suelen estar en juego. Esto incluye el cuerpo y el brazo en sí. En el brazo, encuentra la muñeca del robot que presenta diferentes articulaciones que le permiten moverse en diferentes direcciones. Este movimiento permite que la muñeca del robot controle el efector final que se adjunta al final. Ayuda a realizar diferentes tareas que el brazo robótico debe realizar. Es todo un sistema de diferentes partes que juegan sus roles para lograr un objetivo común. La muñeca del robot que se encuentra en el brazo robótico viene con al menos 2 a 3 articulaciones compactas que le permiten trabajar sin problemas en diferentes aplicaciones. Fuente:www. brainkart.com
El mecanismo de muñeca del robot es una gran parte del manipulador y sirve para orientar el efector final para diferentes aplicaciones. Este mecanismo consta de un brazo que gira alrededor de un eje y presenta articulaciones que le permiten realizar diferentes movimientos en varias direcciones. El mecanismo de muñeca del robot, mientras está en uso, está sujeto a diferentes tipos de entornos de trabajo. Descubrirá que estará expuesto a diferentes vibraciones mientras está en uso. Estas vibraciones pueden afectar negativamente a la muñeca del robot y su función.
La mejor manera de asegurarse de que la muñeca de su robot funcione de la mejor manera es estudiar detenidamente su rendimiento. Sujételo a diferentes pesos en las cargas que lleva el efector final para ver cómo funciona. Esto lo ayudará a medir su carga útil y le permitirá usarlo en los lugares correctos para evitar dañarlo. Además, también debe asegurarse de que el manipulador y la muñeca del robot estén configurados correctamente. Algunas de las configuraciones de muñeca a tener en cuenta incluyen.
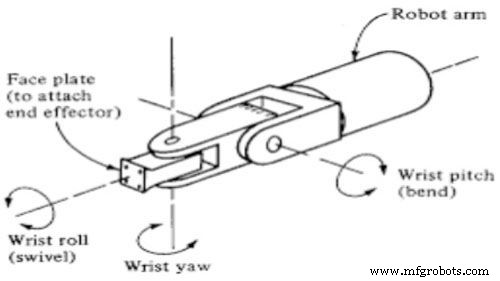
Esta configuración también se conoce como muñeca giratoria. Cuenta con la rotación del mecanismo de la muñeca alrededor del eje del brazo.
El paso en la configuración del mecanismo de la muñeca también se conoce como flexión de la muñeca. Cuenta con una rotación hacia arriba y hacia abajo de la muñeca.
Con el Yaw, el movimiento y la rotación de la muñeca están dedicados a derecha e izquierda.
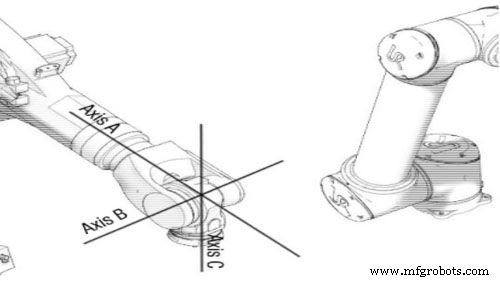
La notación TRL presenta un brazo deslizante que puede girar tanto en el eje vertical como en el horizontal.
Con esto, la muñeca del robot funciona en relación con una columna vertical. Esto permite que la muñeca se mueva hacia arriba y hacia abajo o hacia adentro y hacia afuera, según las tareas que se realicen.
La notación LOO consta de tres articulaciones deslizantes que permiten que la muñeca se mueva en diferentes direcciones. Dos de las tres juntas deslizantes son ortogonales. Se encuentran principalmente en robots rectilíneos y robots X, Y, Z. Fuente:www. researchgate.net
Es importante asegurarse de que el brazo robótico que está utilizando sea de gran calidad y de que esté diseñado con precisión. Uno de los factores más importantes a considerar aquí es la configuración de muñeca con la que trabajará. Debe asegurarse de que la muñeca esté configurada de acuerdo con sus necesidades específicas. Recuerde que el efector final solo se moverá en la dirección que tome la muñeca. Esto demuestra que tener las configuraciones correctas garantizará que el efector final pueda seleccionar y colocar con precisión.
Además, la configuración correcta de la muñeca ayudará a reducir los riesgos de lesiones y también daños al brazo robótico. Determine en qué dirección debe moverse la muñeca para una tarea específica y modifíquela para que se ajuste a sus necesidades. La muñeca del robot es una parte esencial del brazo robótico, así que asegúrese de tener sus necesidades de configuración bajo control para un proceso de automatización más fluido y sin problemas.
La muñeca del robot es un aspecto importante cuando se trata del uso de brazos robóticos y manipuladores para diferentes tareas de automatización. Cuenta con diferentes configuraciones que deben tenerse en cuenta antes de poner en funcionamiento la muñeca del robot. Esto ayuda a garantizar que está trabajando con las mejores configuraciones diseñadas para mover el efector final en la dirección correcta. Cuando obtenga sus brazos robóticos, considere que el fabricante de su brazo robótico lo configure a su gusto. Esto le permitirá comenzar a usarlo en sus procesos comerciales con facilidad. 
Tabla de contenido
¿Qué es una muñeca robot?

El mecanismo de muñeca del robot
Rodar
Pitch
Yaw
Notación TRL
Notación TLO
Notación LOO
Importancia de la configuración de muñeca de los brazos robóticos
Conclusión
Robot industrial
- Lo que un robot autónomo puede y no puede hacer
- ¿Cuál es la realidad de la visión del robot?
- ¿Qué diablos es un robot autoprogramable?
- Cuellos de botella en la fabricación:una guía definitiva
- ¿Qué son los cobots?
- ¿Qué es el Kevlar? Una breve guía
- ¿Qué es un Cobot? Una guía para robots colaborativos
- Una guía para principiantes sobre automatización
- ¿Qué es un Robot Café Barista?
- ¿Qué es un robot de bebidas?
- ¿Qué trabajos han creado los robots?