


Tipos de robots industriales y sus diferentes usos
Descubra los muchos tipos de robots industriales y sus capacidades únicas. Obtenga una comprensión clara de los usos y aplicaciones de cada tipo de robot en la actualidad:brazos robóticos, robots móviles, drones aéreos, robots submarinos y cobots.
¿Cómo se decide qué tipo de robot industrial es el más adecuado?
Hay tantos tipos diferentes de robots en el mercado, ¿cómo saber qué tipo usar? Como ocurre con muchos problemas de diseño e ingeniería, “la forma sigue a la función”. Es decir, qué tipo de robot se necesita depende de su función prevista. ¿Se sujetará el robot al suelo u otra superficie, o debe ser móvil? ¿Cuántas unidades por hora debe poder procesar el robot? ¿Cuál es el peso máximo que debe levantar el robot? Si el robot está sujeto en un solo lugar, ¿cuál es el tamaño del área de trabajo? ¿El sobre de trabajo es rectangular o circular? Responder a estas preguntas reducirá sus opciones rápidamente y le permitirá seleccionar el tipo ideal de robot industrial para sus propósitos.
En este artículo, examinamos diferentes tipos de robots, sus fortalezas y debilidades, y cómo determinar para qué usarlos.
Contenido de este artículo
- Robots estacionarios (brazos robóticos)
- Robots móviles autónomos
- Robots voladores (drones aéreos)
- Robots submarinos
- Cómo obtener el tipo de robot ideal para su organización
Robots estacionarios (brazos robóticos)
Hay siete tipos principales de robots estacionarios disponibles en el mercado. Por estacionario, nos referimos a robots que están atornillados al piso, el techo o alguna otra superficie; no son móviles. Generalmente, los robots estacionarios son brazos robóticos diseñados para tareas como recoger y colocar, clasificar, ensamblar, soldar y terminar.
Aquí consideramos los diferentes tipos de brazos robóticos, sus características y usos.
- Brazos robóticos articulados
- Robots cartesianos o rectangulares
- Robots SCARA
- Robots polares o esféricos
- Robots delta o paralelos
- Robots de pórtico
- Cilíndrico
- Robots / Cobots colaborativos
Brazos robóticos articulados
Ventajas: El movimiento más flexible de todos los tipos de brazos robóticos. Puede ser bastante poderoso, capaz de levantar objetos pesados.
Desventajas: Puede que necesite una valla. Más lento que algunos de los otros brazos robóticos. Más caro que otros brazos robóticos. Necesita sistemas de control más sofisticados.
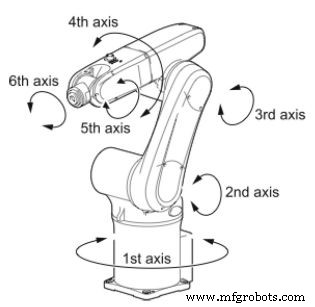
En comparación con otros tipos de brazos robóticos, el movimiento de un brazo robótico articulado se parece más a un brazo humano. Un brazo articulado típico tiene seis ejes o articulaciones. Puede tener menos o más, según la aplicación y el fabricante. Cuantas más articulaciones tiene un robot, más suave y menos "parecido a un robot" se vuelve su movimiento. Esta flexibilidad de movimiento se describe mediante Grados de libertad .
Dato interesante: Los diseñadores de manos artificiales consideran que la mano humana tiene 27 grados de libertad. Un brazo humano tiene 7 grados de libertad, para un total combinado entre el brazo y la mano humanos de 34 grados de libertad.
Reproducir todas las formas sutiles en que se pueden mover el brazo y la mano humanos sería demasiado costoso y complejo para un robot industrial. En general, se acepta que 6 grados de libertad en un brazo de robot industrial son suficientes para realizar casi cualquier tarea que se necesite.
El robot no podrá tocar el piano, ¡pero no es necesario!
Dependiendo de la aplicación, un brazo robótico puede estar equipado con una pinza, el equivalente robótico de una mano. Por lo general, las pinzas robóticas son mucho más simples que la mano humana. A veces pueden ser tan simples como una ventosa o un electroimán. O tal vez se pueda usar una pinza suave de tres dedos para recoger objetos delicados, como productos frescos o un huevo. Hay muchos tipos diferentes de pinzas y todavía no se ha encontrado ninguna pinza robótica que pueda manejar todas las aplicaciones.
Alternativamente, las herramientas de extremo de brazo (EoAT), como se le llama, puede ser algún tipo de herramienta, tal vez una herramienta giratoria que sostiene una broca, o algún otro tipo de broca, para desbarbar, rectificar o fresar. Hay muchas posibilidades, incluida la EoAT especializada para soldar, pintar, lijar, cortar con láser y muchas más.
Los robots articulados son muy flexibles ya que todas sus articulaciones pueden girar, a diferencia de las articulaciones lineales o traslacionales, que solo pueden moverse en línea recta.
Los robots articulados se utilizan en aplicaciones como recoger y colocar, soldadura por arco, soldadura por puntos, embalaje, cuidado de máquinas y manipulación de materiales. La capacidad de producir arcos (o patrones similares) en lugares de difícil acceso hace que los robots articulados sean un buen candidato para la industria automotriz y otras manufacturas que requieren esta capacidad.
Históricamente, los robots grandes y poderosos de brazos articulados capaces de levantar objetos que pesaban una tonelada o más no estaban equipados con sensores que les permitieran conocer su entorno. Si una persona se interpusiera en el camino de un robot de este tipo, podría resultar gravemente herida o incluso morir.
Como resultado, estos brazos robóticos deben separarse en un espacio propio. Solo el personal calificado que comprenda completamente el funcionamiento del robot puede ingresar al espacio vallado o amurallado dentro del cual operan dichos robots.
Sin embargo, si un brazo robótico articulado está equipado con los sensores y el software de control adecuados, puede operar con seguridad alrededor de personas. Por ejemplo, al usar la visión por computadora con una cámara o quizás un sensor LiDAR, si dicho robot detecta que algo se interpone en su trayectoria de movimiento, o incluso que una persona u objeto se está acercando y aún no estorba, el robot puede reducir la velocidad o detenerse. Otros sensores pueden detectar una colisión:si el brazo choca contra algo, se detendrá y / o cambiará de rumbo. Por lo general, los brazos articulados que son seguros para operar junto a las personas están diseñados para tener una velocidad y fuerza limitadas.
Robots cartesianos o rectangulares
Ventajas: Sistema de control simple. Dependiendo del modelo, puede levantar objetos muy pesados. Preciso. Rígido en los tres ejes. Menos costoso que los brazos articulados.
Desventajas: No puede realizar movimientos de rotación.
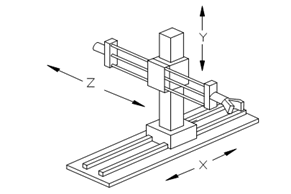
Estos robots utilizan el sistema de coordenadas cartesianas (X, Y y Z) para movimientos lineales a lo largo de los tres ejes (adelante y atrás, arriba y abajo y de lado a lado). Las tres articulaciones son de traslación, lo que significa que el movimiento de la articulación se limita a ir en línea recta. Es por eso que estos robots también se denominan robots "lineales".
Los robots cartesianos se pueden usar para pick-and-place, manejo de materiales, automatización de empaque, almacenamiento y recuperación, corte y perforación, y muchas más aplicaciones.
Son rígidos en las tres dimensiones, lo que los hace muy precisos y repetibles. Son más simples que los brazos robóticos articulados, con un control de software más simple y pueden ser menos costosos, según la aplicación.
Robots de pórtico:un tipo de robot cartesiano
Ventajas: Dependiendo del modelo, puede levantar objetos muy pesados. Puede hacerse muy grande, abarcando toda la longitud de la instalación, si se desea. Puede resultar muy rentable para las aplicaciones adecuadas.
Desventajas: No se puede realizar un movimiento de rotación.

Los robots cartesianos o lineales se pueden configurar como robots de pórtico. Los robots de pórtico se mueven a lo largo de una vía aérea. Dependiendo de su diseño, los robots de pórtico pueden manejar cargas muy pesadas y moverlas de forma rápida y precisa. También se pueden hacer muy grandes, si es necesario, cubriendo todo el espacio del piso de una instalación. Los robots de pórtico más pequeños pueden ser útiles para pick-and-place y otras operaciones que implican alta precisión y buena rigidez.
Debido a que el aspecto de control de movimiento del robot lineal es relativamente simple, a menudo tiene un costo menor que otros tipos de robots y puede ser una solución altamente rentable para muchas tareas de automatización.
El área de trabajo de un robot cartesiano es rectangular. Agregar el movimiento vertical significa que el área de trabajo tiene la forma de una caja.
Robots SCARA
Ventajas: Excelente para muchas aplicaciones de ensamblaje. Rápido y preciso. Rentable para operaciones de montaje.
Desventajas: No es tan flexible como los brazos articulados. No es tan preciso como los brazos cartesianos. No tan rápido como los brazos del robot Delta.
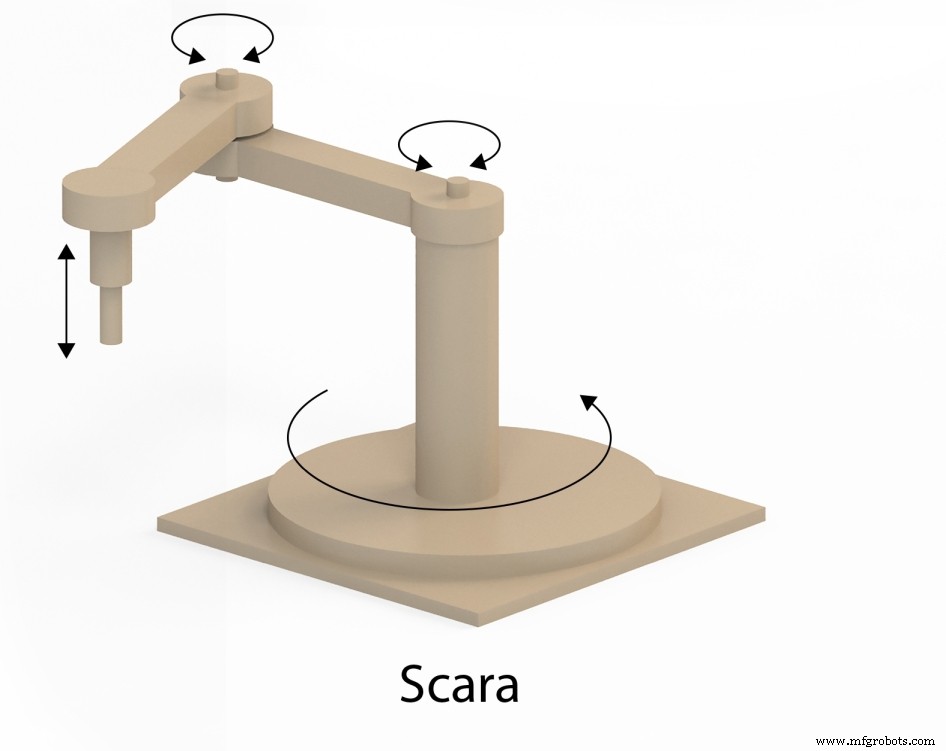
Los robots SCARA (brazo robótico de ensamblaje de cumplimiento selectivo) son similares a los robots cartesianos en que se mueven en 3 articulaciones o ejes. Sin embargo, a diferencia de los robots cartesianos, dos de las articulaciones de los robots SCARA son rotacionales. Por tanto, son capaces de realizar movimientos más complejos que los robots cartesianos. Por lo general, son más rápidos y tienen más flexibilidad de movimiento, pero son menos precisos que los robots cartesianos.
Dato interesante: El uso generalizado de robots SCARA revolucionó la pequeña industria de la electrónica. Debido a su tamaño reducido, simplicidad y características de diseño, son especialmente adecuados para este campo de aplicación y han demostrado ser muy rentables.
Como lo indica el "ensamblaje" en el nombre, el brazo robótico SCARA se inventó para aplicaciones de ensamblaje. El robot SCARA fue creado en 1981 por Hiroshi Makino en la Universidad de Yamanashi en Japón. El "cumplimiento" en el nombre se refiere a una cierta cantidad de "dar". Es decir, si empuja un robot SCARA en el plano horizontal, cederá un poco, se moverá, no es totalmente rígido. Sin embargo, en el plano vertical, un robot SCARA es bastante rígido y no “cederá” si lo empuja en esta dirección. Por lo tanto, tiene un cumplimiento "selectivo". Es compatible en el plano horizontal y no en el vertical.
El cumplimiento selectivo es bastante útil en operaciones de ensamblaje en las que una pieza debe insertarse en una placa de circuito, por ejemplo. Este tipo de ensamblaje a menudo requiere que una pieza encaje en un agujero. Centrar la pieza en el orificio a menudo requiere un poco de "cumplimiento" para encontrar el punto central:un poco de movimiento o un poco de "ceder". Entonces, la fuerza de inserción, que se mueve hacia abajo, debe ser firme y rígida.
Los robots SCARA son menos rígidos que los robots cartesianos y también están limitados al peso que pueden levantar, en comparación con el robot cartesiano que puede levantar objetos bastante pesados. Los robots SCARA ocupan poco espacio y se utilizan generalmente para aplicaciones en las que las distancias a mover son relativamente pequeñas. Tienen menos grados de libertad que los brazos articulados. Por otro lado, tienen un alto grado de precisión y son bastante repetibles. Y son menos costosos que un brazo articulado.
El espacio de trabajo de un robot SCARA es cilíndrico, lo que también es una consideración al considerar la aplicación. Los robots SCARA son generalmente más rápidos que los brazos articulados, aunque no tan rápidos como los robots Delta.
Robots polares o esféricos
Ventajas: Sistema de control más sencillo que el brazo articulado. Puede tener un largo alcance. Muy bueno para muchas aplicaciones de soldadura. Puede ser más rápido que el brazo articulado.
Desventajas: No es tan flexible como los brazos robóticos articulados. Tecnología más antigua. A menudo necesita una huella bastante grande. No tan rápido como los brazos Delta.
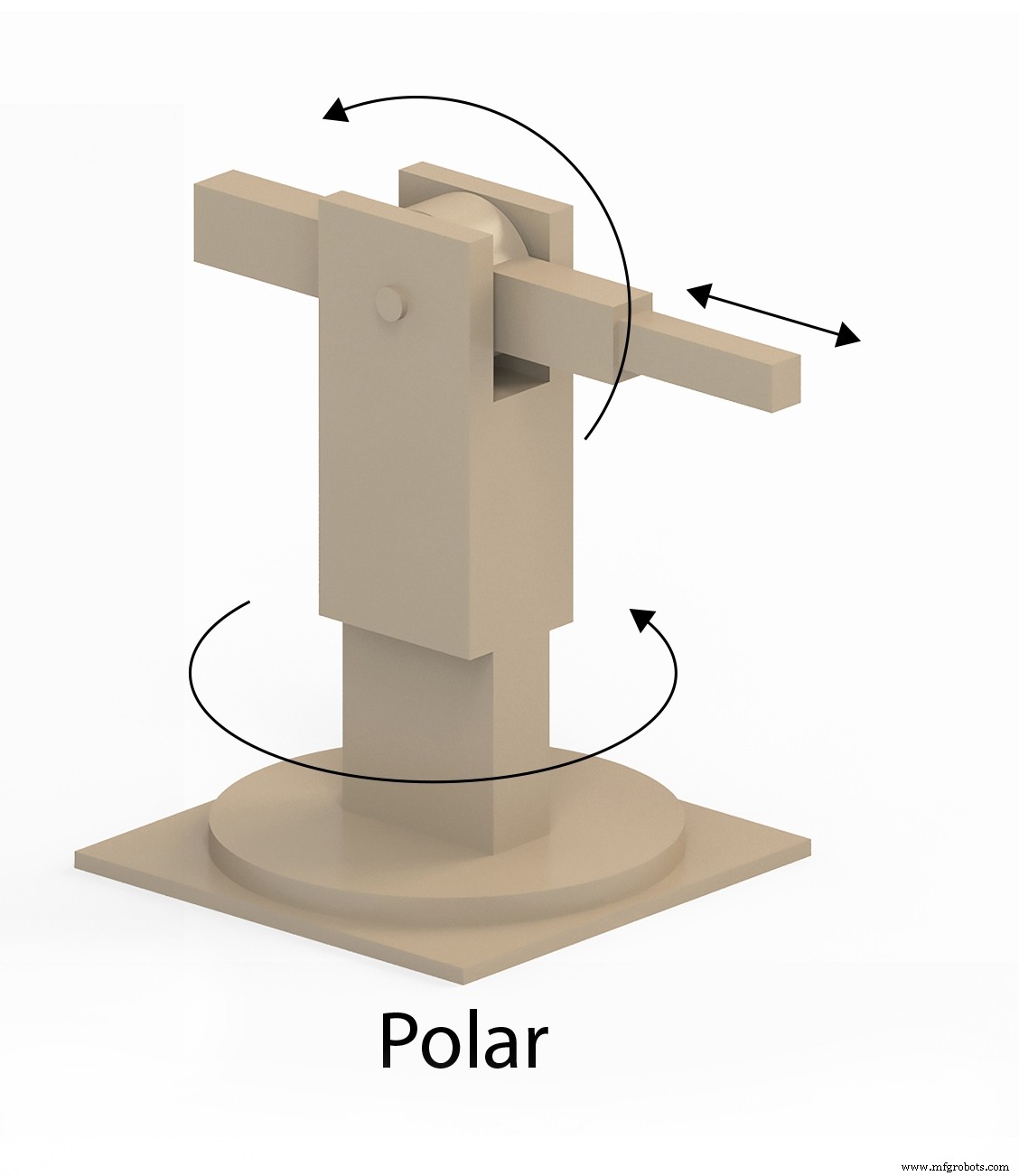
Los robots polares (a veces llamados robots esféricos) cuentan con una combinación de dos articulaciones rotacionales y una articulación lineal. Su diseño crea un espacio de trabajo de forma esférica.
Dato interesante: El primer robot industrial (creado en la década de 1950), llamado "Unimate", fue un robot esférico.
Los robots polares se pueden utilizar para moldeo por inyección, pintura, soldadura por arco y soldadura por puntos. Pueden tener un gran alcance cuando están equipados con un brazo lineal de tamaño adecuado.
Los robots polares son una tecnología más antigua y pueden ser reemplazados por robots de brazo articulado (que también tienen un área de trabajo esférica), aunque en algunas aplicaciones el robot polar puede ser aún más rentable que sus alternativas.
Robots Delta
Ventajas: El diseño más rápido de brazos robóticos para operaciones de recogida y colocación. Ligero. Preciso.
Desventajas: Limitado a objetos relativamente pequeños y livianos. No apto para trabajar con objetos en un plano vertical. Alcance limitado.
Robots Delta (también llamados robots paralelos) tienen tres brazos robóticos en forma de paralelogramos. Por lo general, el robot delta se encuentra encima de las piezas de trabajo, sujeto a un caballete superior. Debido a que todos los motores están en la base, las articulaciones y los brazos del robot son muy ligeros en comparación con otros robots. El robot Delta tiene un área de trabajo en forma de cúpula invertida.
Dato interesante: El robot Delta fue diseñado originalmente para permitir que un fabricante de chocolate recoja trozos de chocolate y los coloque en una caja.

El diseño del robot Delta da como resultado un funcionamiento preciso y de alta velocidad. Los robots Delta se utilizan principalmente en aplicaciones de pick and place. Las aplicaciones adicionales incluyen dispensación, soldadura y ensamblaje de adhesivo. Los robots Delta no pueden transportar cargas útiles pesadas y eso limita los tipos de herramientas de extremo del brazo (EoAT) y las tareas que pueden realizar.
Los diseños híbridos de los robots Delta a veces colocan juntas giratorias al final de los brazos para aumentar la flexibilidad de su movimiento.
Robots cilíndricos
Ventajas: Rígido. Preciso. Perfecto en aplicaciones que requieren geometría circular.
Desventajas: Tecnología más antigua. Flexibilidad de movimiento limitada.
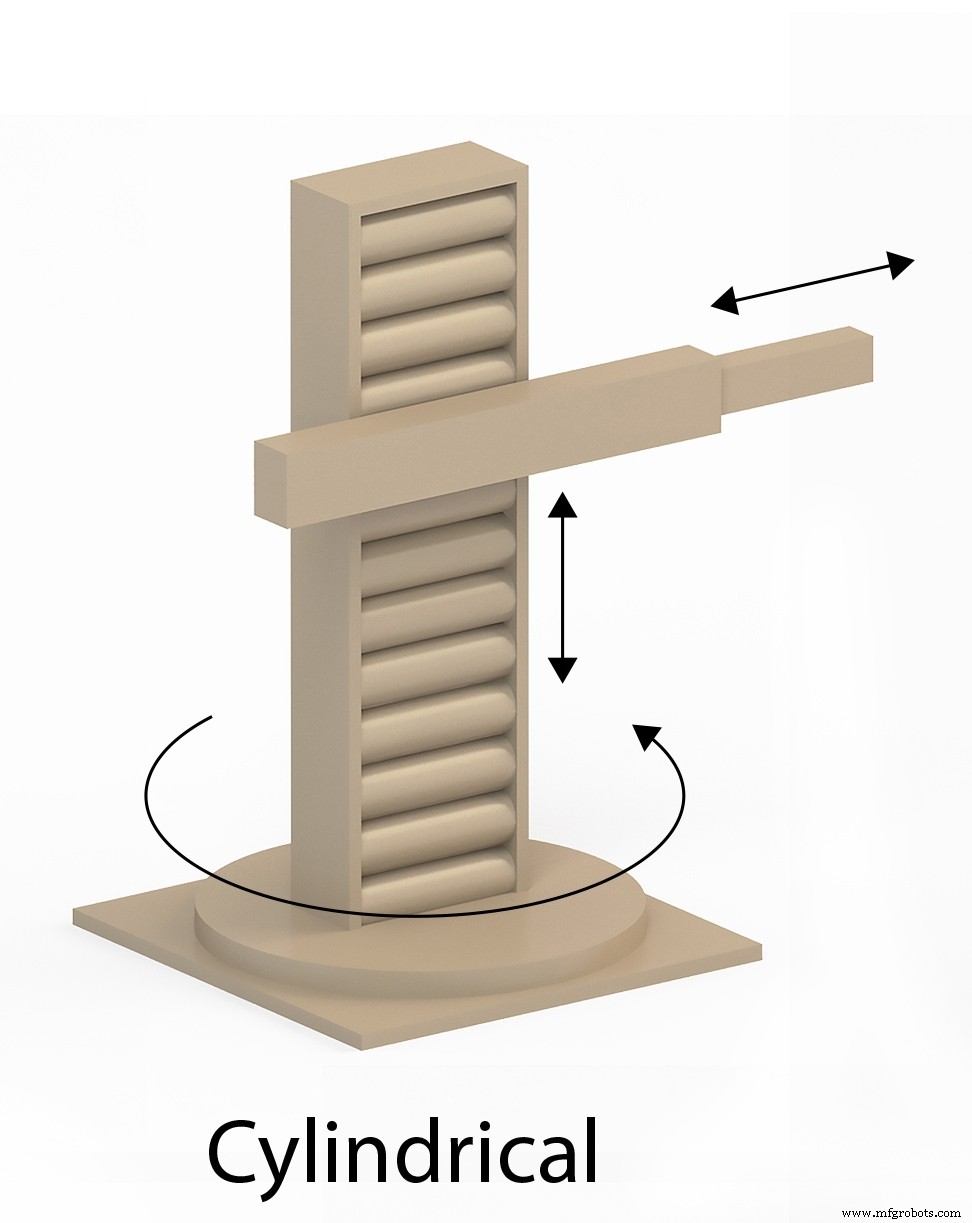
Robots cilíndricos Tener al menos una articulación giratoria en la base y dos articulaciones lineales. Este diseño conduce a un espacio de trabajo de forma cilíndrica.
Los robots cilíndricos se utilizan normalmente en espacios de trabajo reducidos y se adaptan perfectamente a los objetos que necesitan tener una simetría circular (por ejemplo, cables, tuberías). Las aplicaciones de rectificado, ensamblaje y soldadura por puntos utilizan robots cilíndricos.
Robots colaborativos (cobots)
Ventajas: Seguro trabajar junto a las personas. Las interfaces modernas permiten "enseñar" al brazo robótico qué hacer sin escribir código.
Desventajas: No siempre es el tipo de brazo robótico más rápido. Limitado en fuerza y velocidad.
Los robots colaborativos (cobots) permiten la interacción humano-robot en un entorno de trabajo seguro, sin la necesidad de vallas u otras medidas de seguridad tomadas en las aplicaciones tradicionales de robots industriales. Sin embargo, las medidas de seguridad conducen a una disminución de la velocidad de funcionamiento.

Además de ser seguro para operar junto con humanos, una de las características que hace que los cobots sean más colaborativos es la capacidad de un operador para enseñarle al brazo del robot los movimientos que debe realizar sin tener que escribir código de programación. El operador agarra el brazo del robot y lo mueve físicamente en la forma en que el robot necesita ir. El brazo del robot puede entonces replicar el movimiento demostrado.
Por lo general, un cobot estándar no está diseñado para manipular objetos muy pesados. Esto crea una limitación en la gama de productos que puede administrar.
Los robots colaborativos tienen una amplia gama de aplicaciones, como cuidado de máquinas, recogida y colocación, ensamblaje, soldadura por arco, pero generalmente no son adecuados para aplicaciones pesadas o tareas de muy alta velocidad.
Robots móviles autónomos

Los AMR o robots móviles autónomos representan un segmento en rápido crecimiento del mercado de robots industriales. Vienen en muchas formas y tamaños, optimizados para las tareas para las que están diseñados.
Carros con ruedas
Los AMR en forma de carros o vehículos con ruedas se utilizan normalmente para transportar mercancías dentro de una fábrica o almacén. Están equipados con sensores, potencia informática a bordo y motores eléctricos que les permiten moverse por una instalación y crear un mapa interno de la misma. Esto a menudo se hace con una persona que sigue el AMR y lo guía por control remoto.
Una vez que se ha creado un mapa interno, el AMR puede recibir instrucciones sobre los destinos a los que debe viajar. Una característica clave de los AMR es que pueden viajar de forma independiente (“autónoma”) de un lugar a otro, evitando obstáculos en el camino. Si una persona, un montacargas u otro objeto les bloquea el camino, pueden desviarse para evitar el obstáculo o incluso planificar una ruta completamente nueva hacia su destino.
Las capacidades autónomas de los AMR los hacen muy flexibles en comparación con un sistema de transporte.
Los AMR en forma de carros con ruedas se pueden usar individualmente para transportar mercancías, y también se pueden usar como parte de un enjambre o flota de robots. Amazon, por ejemplo, utiliza flotas de AMR. Amazon utiliza lo que se llama una configuración de "productos a persona", en la que cada robot recoge un estante completo de productos y se lo lleva a una persona en una estación de preparación de pedidos. Luego, la persona toma el producto (s) del estante y lo coloca en un contenedor para el cumplimiento del pedido de comercio electrónico.
Recientemente, los avances en visión por computadora, inteligencia artificial y tecnología de pinzas han hecho posible reemplazar a la persona en la estación de recolección por un brazo robótico articulado. En este caso, el carro con ruedas AMR lleva la mercancía al brazo del robot, para una colaboración de robot a robot.
Vehículos autónomos (AGV)
Los AGV suelen tener la forma de un vehículo con ruedas y son una tecnología más antigua que los AMR. Tienen menos inteligencia a bordo y, en consecuencia, no son tan autónomos como los AMR. Los AGV no tienen la capacidad de hacer un mapa de una instalación. En cambio, confían en los caminos que se les han trazado. Los recorridos se definen mediante cables colocados en el suelo, cinta especial u otro tipo de guías. Si un AGV encuentra obstáculos en su camino, solo puede detenerse y pedir ayuda.
Sin embargo, las distinciones entre AGV y AMR se están volviendo cada vez más borrosas. A los AGV se les está dando más poder de computación a bordo, y algunos ahora tienen la capacidad de sortear obstáculos en su camino.
AMR con brazos robóticos
Se puede montar un brazo robótico en la parte superior de un AMR de carro con ruedas. Esto aumenta la flexibilidad del robot y la variedad de tareas que puede realizar. Una aplicación es utilizar un robot de este tipo para atender una fila completa de máquinas herramienta. El robot puede descargar una pieza terminada y cargar una nueva pieza de trabajo en blanco en una máquina, y luego moverse hacia abajo en la fila y repetir las operaciones para una serie de máquinas.
Robots con patas
Millones de personas han visto el video de YouTube de robots bailarines realizado por Boston Dynamics y, por lo tanto, han visto robots de dos y cuatro patas. Un uso industrial de los robots con patas prevé desplegarlos para la entrega de paquetes. Otro caso de uso es para operaciones de búsqueda y rescate.
Usar patas en lugar de ruedas tiene ciertas ventajas. Las patas permiten al robot viajar sobre algunos tipos de terreno que los carros con ruedas encontrarían difíciles o imposibles. Las piernas hacen posible subir escaleras y entrar y salir de un vehículo más fácilmente que un carro con ruedas.
AMR esféricos
Los robots móviles autónomos en forma de esfera están disponibles comercialmente y tienen ventajas especiales sobre otros factores de forma. Los componentes esféricos del sistema AMR están sellados dentro de una carcasa duradera. Esto los hace capaces de operar en entornos hostiles. También pueden flotar y viajar sobre el agua. Los AMR esféricos pueden ser anfibios, viajando tanto sobre el agua como sobre la tierra.
El sistema de propulsión de un AMR esférico se basa más comúnmente en cambiar el centro de gravedad.
Las aplicaciones industriales de los AMR esféricos se encuentran principalmente en la vigilancia y la inspección remota. Equipados con cámaras y comunicación, pueden transmitir video al operador remoto. Para entornos hostiles que pueden tener gases tóxicos u otras condiciones peligrosas, un AMR esférico podría ser ideal.
Robots voladores (drones aéreos)
Los vehículos aéreos no tripulados (UAV) o drones se utilizan cada vez más para diversos fines industriales. Una aplicación es usar drones en los almacenes para hacer inventario. El dron puede volar por los pasillos del almacén y usar la visión por computadora para contar la cantidad de artículos en cajas en los estantes.

Dependiendo de su diseño, un dron industrial puede ser una especie de Robot Móvil Autónomo (AMR), ya que algunos modelos pueden detectar obstáculos automáticamente y evitarlos, y navegar de forma independiente hasta su destino. A algunos drones industriales se les puede dar una "misión", que podría consistir en sobrevolar una operación de minería a cielo abierto o un proyecto de infraestructura. El dron realiza su misión de forma autónoma y puede grabar vídeo del proyecto, o realizar determinadas medidas y registrarlas. Estos drones se pueden usar para monitorear el progreso de los proyectos de construcción.
Amazon y otras empresas ya están haciendo un uso limitado de drones para la entrega de bienes duraderos y comestibles.
Robots submarinos

Existe una amplia variedad de robots diseñados para usarse bajo el agua. Algunos robots submarinos están diseñados para ser autónomos (vehículos submarinos autónomos - UAV), y algunos están hechos para ser controlados de forma remota, ya sea de forma inalámbrica o con una correa por cable. Algunos robots submarinos utilizan hélices como sistema de propulsión, similar a los submarinos. Por otro lado, muchos de estos robots imitan la acción de los seres vivos para su propulsión. Algunos imitan la acción de los delfines, otros imitan serpientes y otros se mueven como peces. La imitación de la naturaleza de esta manera se llama "biomimetismo" porque la acción del robot imita a las criaturas biológicas.
Los robots submarinos se pueden utilizar para la inspección de plataformas petrolíferas marinas, oleoductos y para la investigación científica. Otras aplicaciones implican el uso de robots submarinos para inspeccionar el fondo de los puentes, inspeccionar las tomas de presas hidroeléctricas e inspeccionar los arrecifes de coral.
Los departamentos de policía están utilizando robots submarinos para tomar grabaciones de video del fondo de cuerpos de agua en busca de evidencia. Los militares también están interesados en robots submarinos. ¿Podría un sistema de sonar diferenciar entre un "delfín" robótico y uno real?
Las ventajas de los robots submarinos son muchas. Dichos robots significan que no es necesario incurrir en el riesgo y el gasto de los buceadores humanos. Los robots pueden permanecer sumergidos más tiempo que las personas. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Please note there are impartial HowToRobot experts who can help you navigate through the process. Click here to set up a consultation with an expert advisor.
Robot industrial
- Diferentes tipos de escaleras industriales y sus aplicaciones
- Tipos de grúas EOT y sus usos
- Diferentes grados de bronce de aluminio y sus usos
- 5 aleaciones metálicas industriales importantes y sus usos
- Diferentes tipos de punzones y sus usos
- ¿Cuáles son los diferentes tipos de punzones y sus usos?
- Comprensión de los diferentes tipos de herramientas de punzonado y sus usos principales
- Diferentes tipos de metales no ferrosos y sus usos
- Diferentes tipos de fundición a presión y sus aplicaciones.
- Diferentes tipos de tornos y su clasificación
- Diferentes tipos de herramientas de medición y sus usos.