


10 formas útiles de personalizar la interfaz de RoboDK
Cada usuario de robot tiene diferentes gustos para programar. Aquí hay 10 excelentes maneras de personalizar la interfaz de RoboDK para que se adapte a usted.
¿Alguna vez has intentado prepararte el desayuno en la cocina de otra persona?
Es una pesadilla, ¿no?
No sabes dónde están los cubiertos, la tostadora tiene una variedad confusa de botones y el refrigerador parece más difícil de navegar que las montañas de Mordor.
Esto es exactamente lo que puede sentir cuando intenta usar un software de programación diferente al que usa normalmente. La interfaz simplemente no se ve bien y puede llevar un tiempo acostumbrarse.
Pero, con RoboDK no necesita comprometerse. La interfaz es extremadamente personalizable. Hay opciones para modificar una impresionante variedad de aspectos diferentes para satisfacer sus necesidades.
Aquí hay 10 formas ultra útiles de personalizar la interfaz de RoboDK según sus preferencias.
1. Cambiar a modo oscuro
Hace años, cuando estaba en la universidad, uno de mis colegas me habló de los beneficios de cambiar al "modo oscuro" cuando estás programando.
La mayoría de los paquetes de software utilizan un fondo blanco con texto negro. El modo oscuro invierte todos los colores para que sean opuestos, es decir, texto brillante sobre un fondo de fondo. Mucha gente dice que el modo oscuro reduce la fatiga visual (y hubo algunas pruebas de que redujo el parpadeo en los monitores CRT antiguos).
Hay teorías contradictorias sobre si el modo oscuro es realmente mejor para tus ojos en estos días con las pantallas modernas (es mucho mejor descansar los ojos regularmente cuando programas), pero podemos decir una cosa con seguridad:a algunas personas les encanta el modo oscuro.
Si eres fanático del modo oscuro, RoboDK ahora lo activará automáticamente cuando hayas configurado tu sistema operativo en modo oscuro. También puede personalizar esto en las opciones de visualización (seleccione Herramientas> ventana Opciones> pestaña Visualización ).
Con pantallas OLED (aunque no LCD), el modo oscuro también puede reducir la energía utilizada por la pantalla, lo cual es excelente si está usando RoboDK con batería.
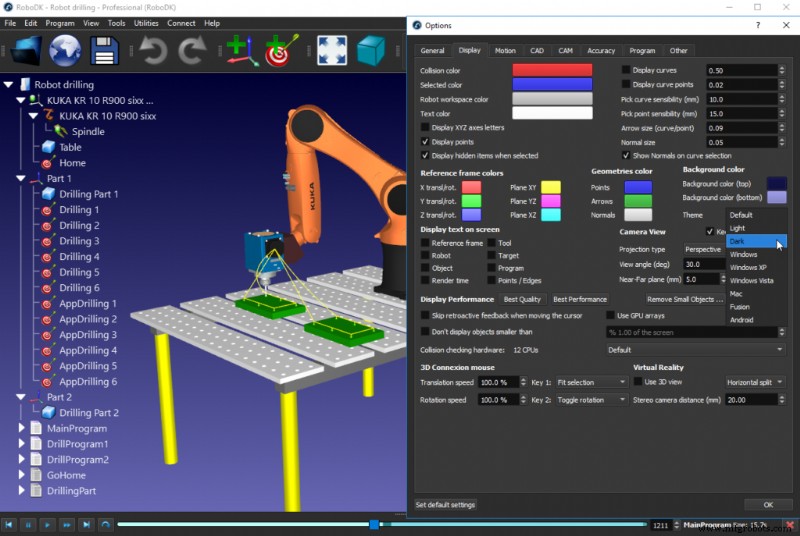
2. Elige todos los colores
Incluso si no está utilizando el modo oscuro, puede cambiar casi todos los colores en RoboDK para adaptarlos a sus preferencias.
Los colores que puede cambiar incluyen:color de colisión, color de texto, color de puntos, color de fondo, colores de marco de referencia y el color del elemento seleccionado.
Todo esto se puede cambiar a través de Herramientas> Ventana de opciones> pestaña Mostrar .
3. Combina tu modo de ratón favorito
Como usuario de varios programas de gráficos 3D, sé lo molesto que es cuando cambias a un nuevo programa y el modo del mouse es diferente. De repente, arriba se convierte en abajo y abajo se convierte en arriba, la función de la rueda del mouse cambia y las funciones de los botones cambian.
RoboDK le permite cambiar el modo del mouse al modo que prefiera a través del menú Herramientas> ventana Opciones> pestaña General .
4. Haga coincidir su paquete CAD/CAM automáticamente
Si ha integrado su paquete CAD/CAM favorito en RoboDK, usando uno de nuestros complementos, puede hacer que RoboDK coincida con el estilo visual y el modo de mouse para ese programa automáticamente.
Por ejemplo, si está utilizando el complemento de SolidWorks, puede configurar el "tema de SolidWorks" a través del menú del complemento.
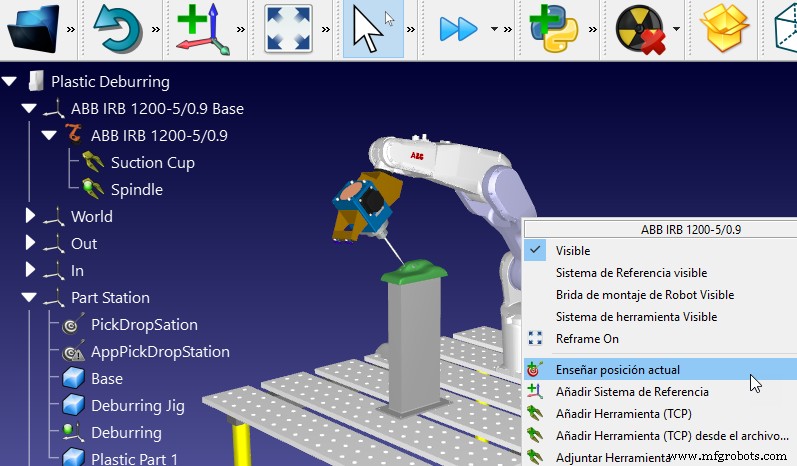
5. Cambiar el idioma
Siempre es más fácil navegar por un software nuevo si los menús están escritos en su idioma nativo.
En RoboDK, puede cambiar el idioma fácilmente a través del Menú Herramientas> Idioma.
Al momento de escribir, contiene soporte para 16 de los idiomas más comunes. No todos los idiomas se han traducido por completo, pero las funcionalidades clave están representadas.
6. Cambia la perspectiva
Los programas que usan gráficos 3D sufren un problema interesante. A veces desea ver los objetos como lo haría en el mundo real (con un efecto de perspectiva realista). Otras veces, desea que la vista refleje las dimensiones con mayor precisión, incluso si el modelo parece menos realista.
Puede alternar entre las dos vistas (perspectiva y ortográfica) a través del menú Herramientas> ventana Opciones> pestaña Visualización.
7. Cambiar formato de número
Todos los países del mundo se pueden dividir en dos grupos:los que usan un punto (.) para separar un número decimal y los que usan una coma (,).
Por ejemplo:
- En Japón, los números se escriben de esta forma: 1.234.567,89 — Este formulario es utilizado por alrededor del 41% de los países del mundo.
- En Suecia, los números se escriben de esta forma:1.234.567,89 — Este formulario es utilizado por alrededor del 55% de los países del mundo.
- Finalmente, en Canadá, los números se escriben en ambas formas según el contexto. — Este es el caso en alrededor del 4% de los países del mundo.
Puede cambiar la configuración regional del número de RoboDK a través del menú Herramientas> ventana Opciones> pestaña General.
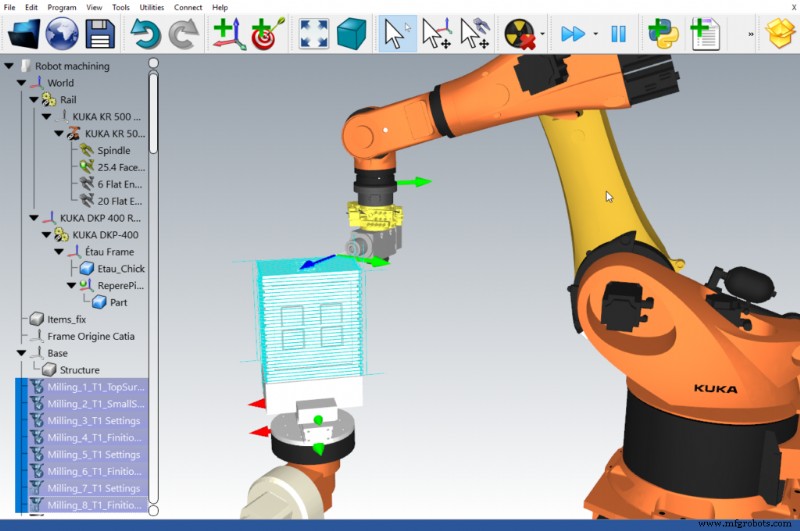
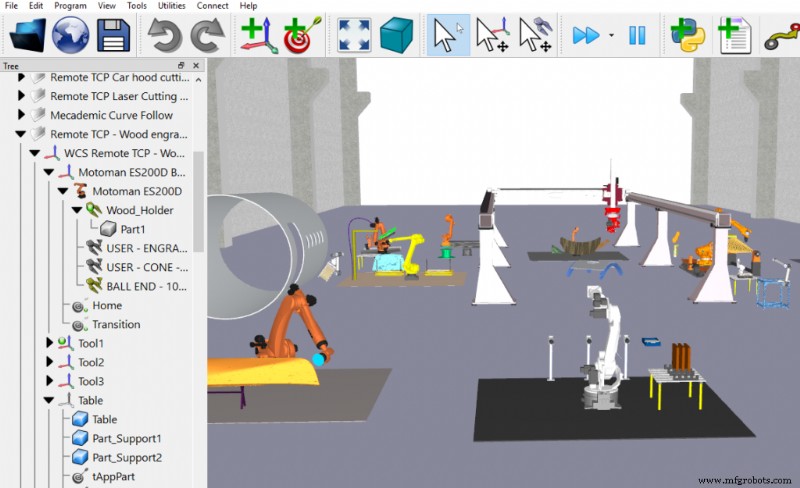
8. Establecer el tamaño y el estilo del árbol
El árbol del programa es visible a la izquierda de la ventana de RoboDK. Contiene todos los objetos e instrucciones del programa para la simulación actual.
A veces, querrá alejarse del árbol del programa para obtener una vista más completa de todos los elementos que contiene. Otras veces, querrá volver a acercar la imagen.
Puede cambiar el tamaño del árbol del programa manteniendo presionada la Ctrl tecla y girando la rueda del ratón.
También puede cambiar el fondo del árbol de transparente a acoplado y viceversa a través del menú Ver> Mostrar árbol dentro de la ventana.
9. Optimizar para velocidad o rendimiento
RoboDK funciona bastante bien en computadoras de bajo rendimiento. Sin embargo, es posible que desee cambiar algunas configuraciones de visualización para reducir la carga computacional.
Hay 3 opciones relacionadas con el rendimiento de visualización que puede encontrar en Menú de herramientas> Ventana de opciones> pestaña Visualización . Estos le permiten personalizar la pantalla para obtener la mejor calidad o el mejor rendimiento. O bien, puede usar Simplificar objeto para reducir la cantidad de vértices en un modelo 3D.
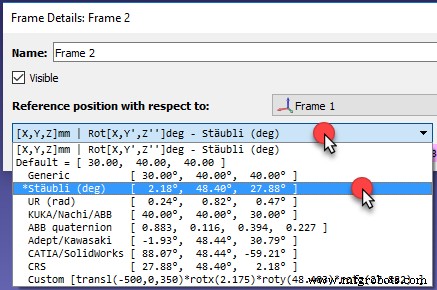
10. Elija el modo de ángulo de Euler
Los ángulos de Euler son el método utilizado en robótica para representar ubicaciones y orientaciones en el espacio. Lamentablemente, todos los fabricantes de robots y paquetes CAD/CAM utilizan una convención ligeramente diferente para los ángulos de Euler para representar la ubicación de un sistema de coordenadas (también conocido como pose) con respecto a otro sistema de coordenadas.
RoboDK es compatible con las convenciones de ángulo de Euler de todos los principales fabricantes de robots. Puede cambiar la convención de cada uno a través de la configuración de cada sistema de coordenadas o la configuración predeterminada en menú Herramientas> ventana Opciones> pestaña General.
Para obtener una introducción completa a los ángulos de Euler, consulte nuestro artículo Robot Euler Angles:The Essential Primer.
Sean cuales sean sus preferencias, ¡RoboDK tiene una opción para usted!
¿Cómo te gustaría personalizar RoboDK? Cuéntanos en los comentarios a continuación o únete a la discusión en LinkedIn, Twitter, Facebook, Instagram o en el foro de RoboDK.
Robot industrial