


Coche controlado por Bluetooth
Componentes y suministros
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
¡Hola!
Todo lo que pueda controlarse es genial. ¿No es así? A los humanos nos encanta controlar cosas y por eso la automatización y la robótica son tan fascinantes.
Este tutorial le enseñará cómo crear su propio automóvil controlado por Bluetooth. Así que comencemos.
Este será un automóvil controlado por Bluetooth, por lo que para este proyecto usaremos el módulo Bluetooth HC-05 para recibir los paquetes de datos de control.
También necesitaremos una aplicación de Android que enviará los paquetes de datos de control al módulo Bluetooth. Usaremos una aplicación de terceros (haga clic aquí para descargar) para este propósito.
- -> ¡Bien, amigos! Construyamos el hardware.
- -> Carrocería del coche.
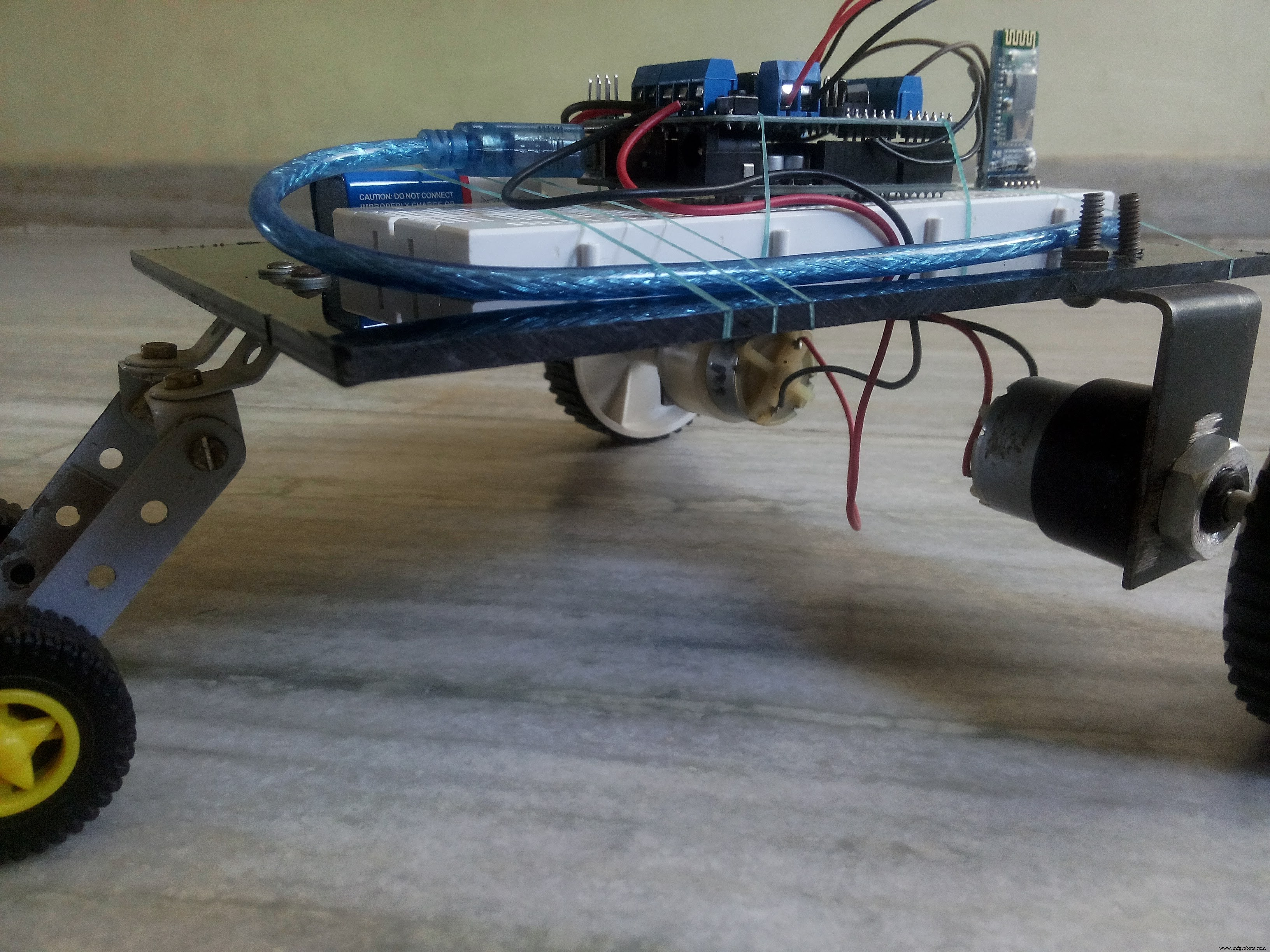
El automóvil que estamos construyendo para este proyecto será un automóvil de doble motor. Usé dos motores de CC de 12 v 200 rpm. Puede utilizar un chasis confeccionado. Usé una lámina de PVC como chasis.
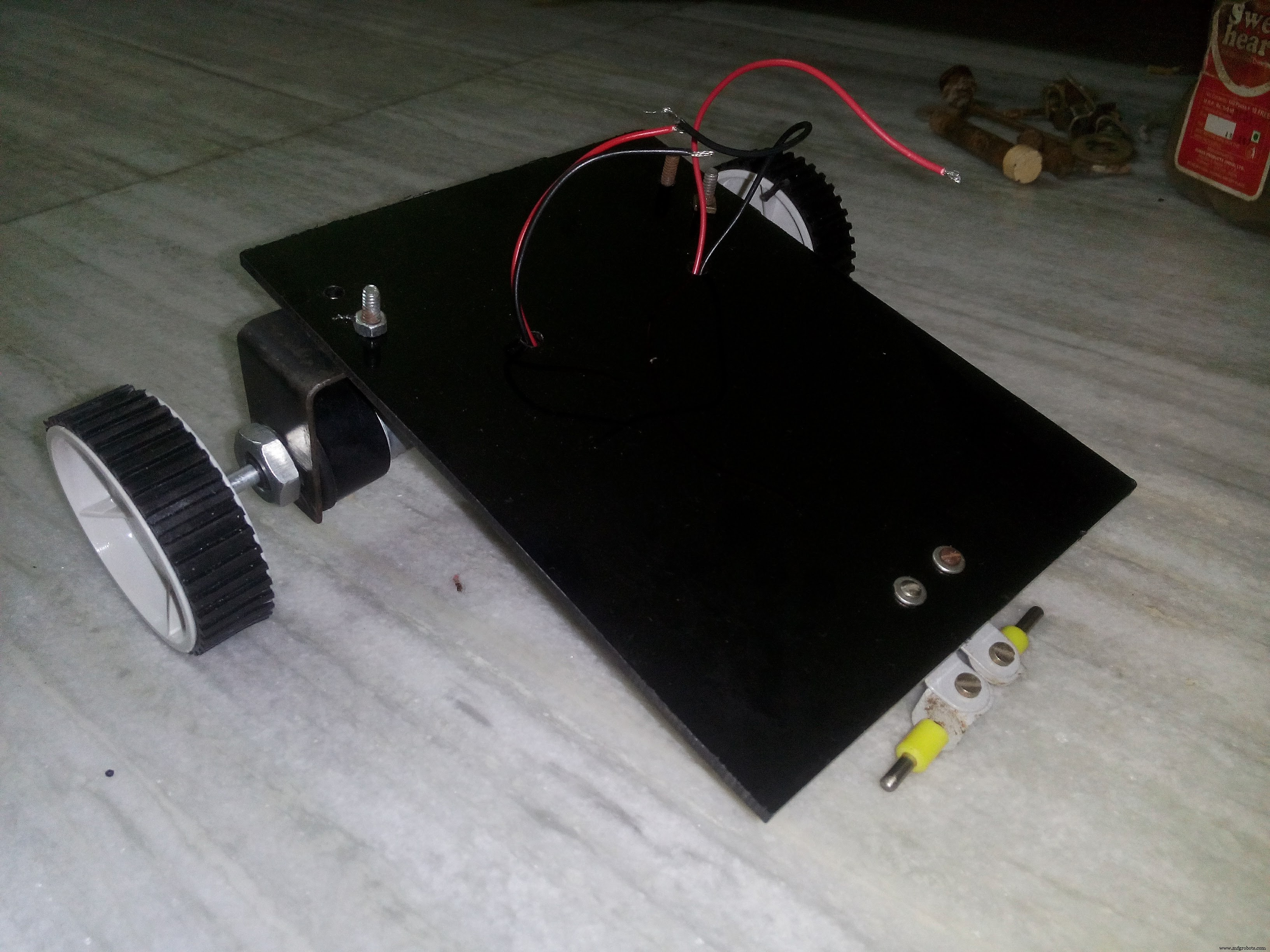
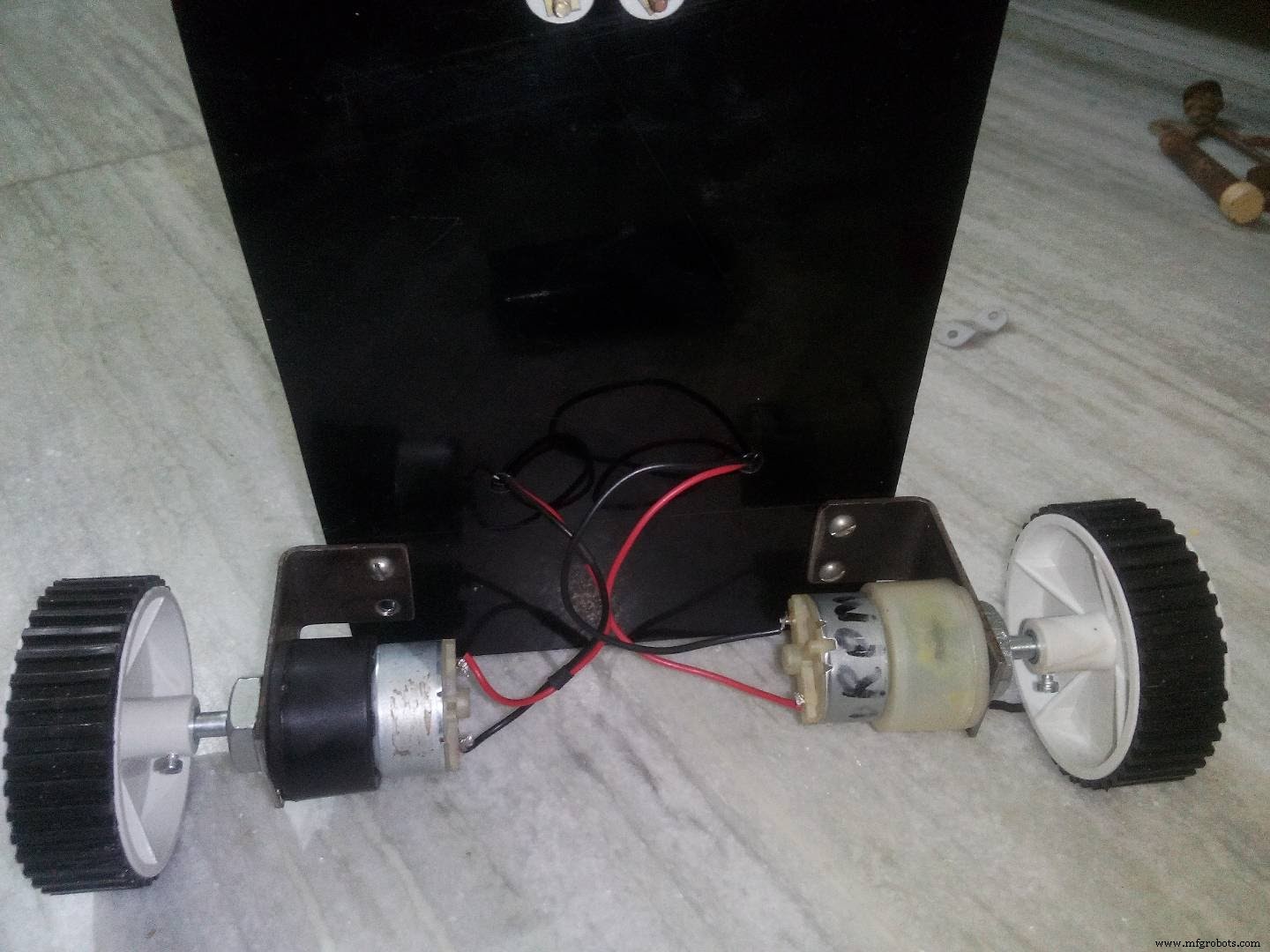
Así está lista la estructura básica de nuestro coche. Puede usar este diseño o puede desarrollar su propio diseño, pero recuerde mantener el peso lo más bajo posible ya que este es un diseño de dos motores.
-> Circuito
Ahora construyamos el circuito
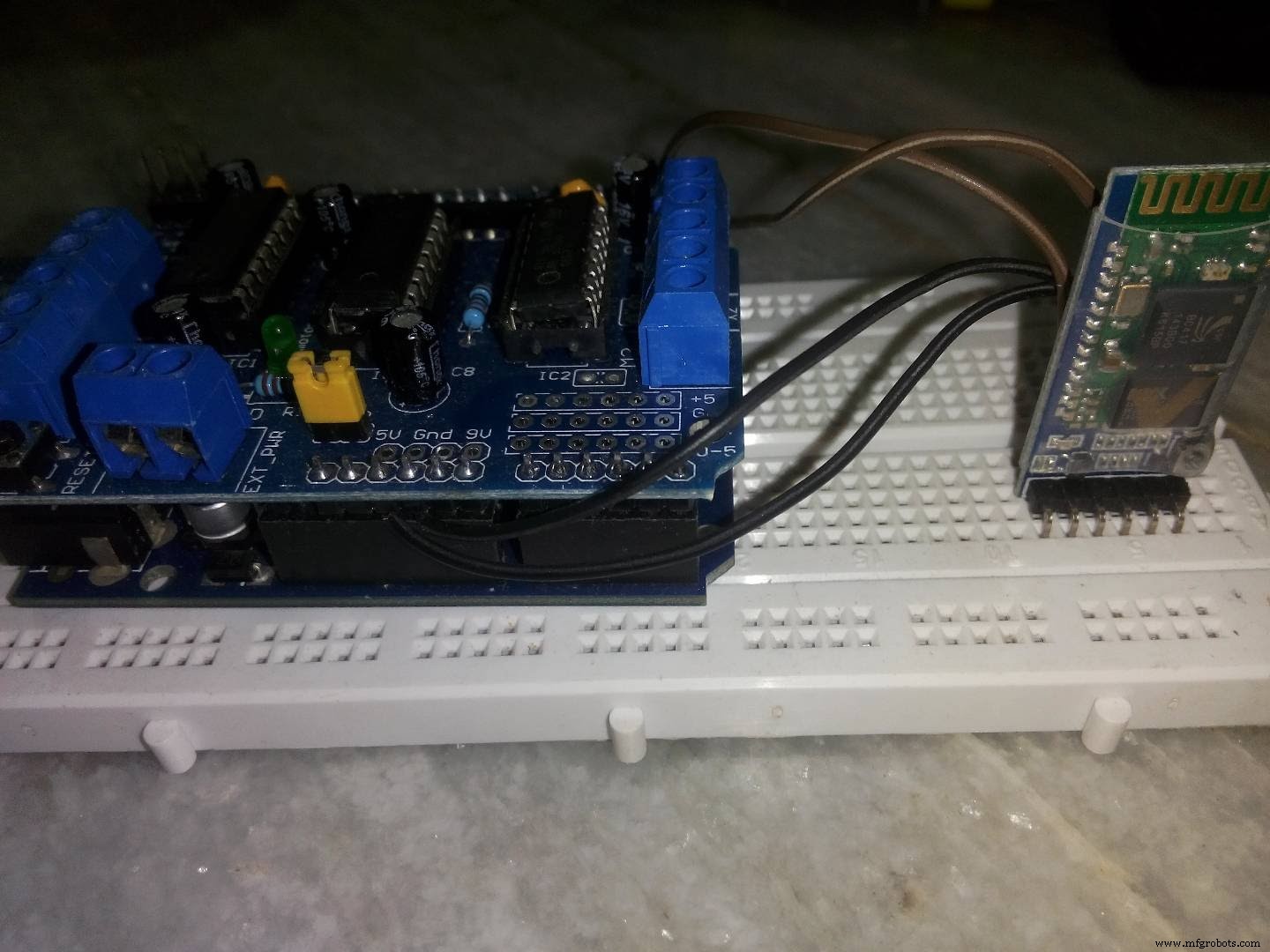
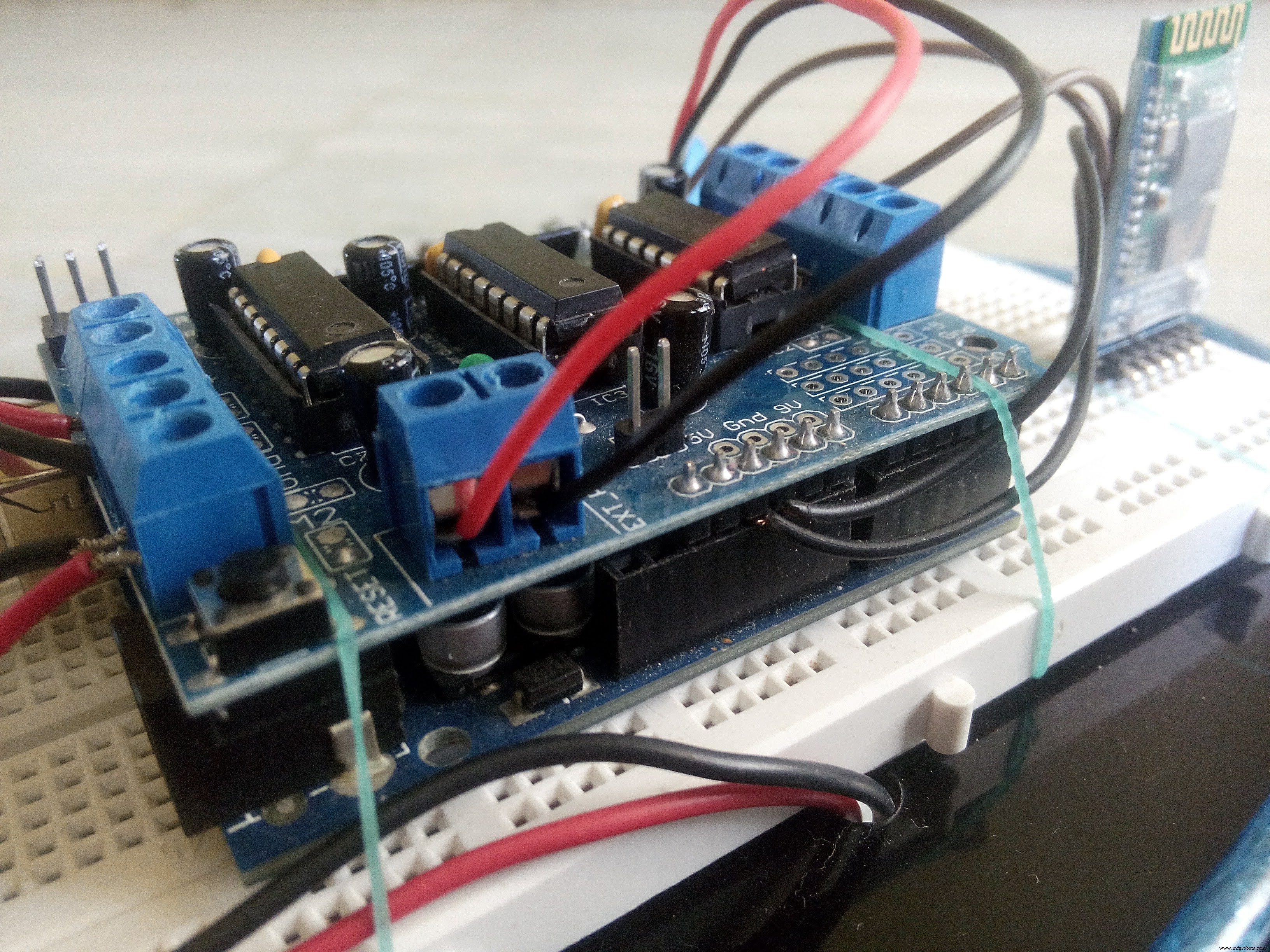
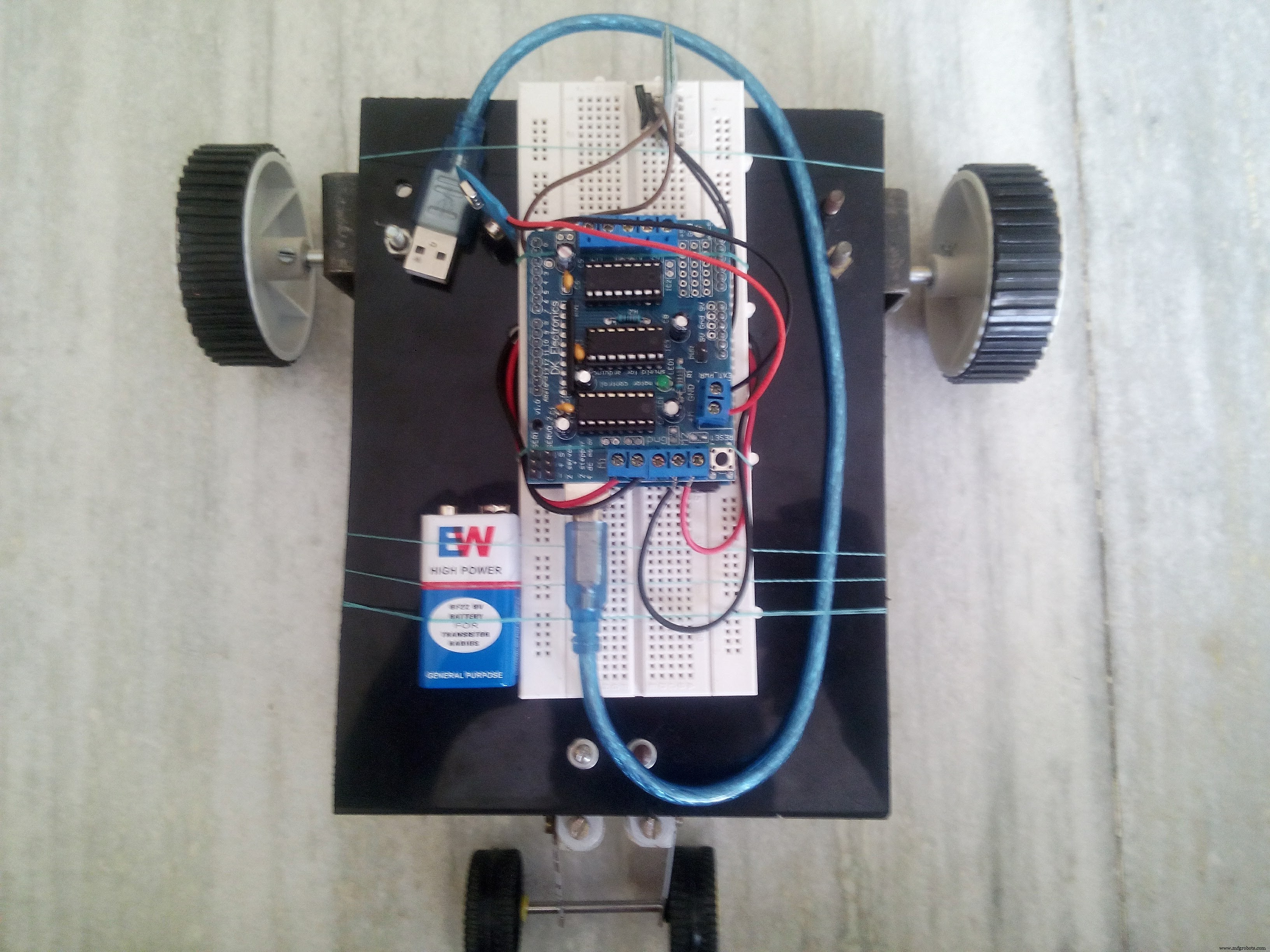
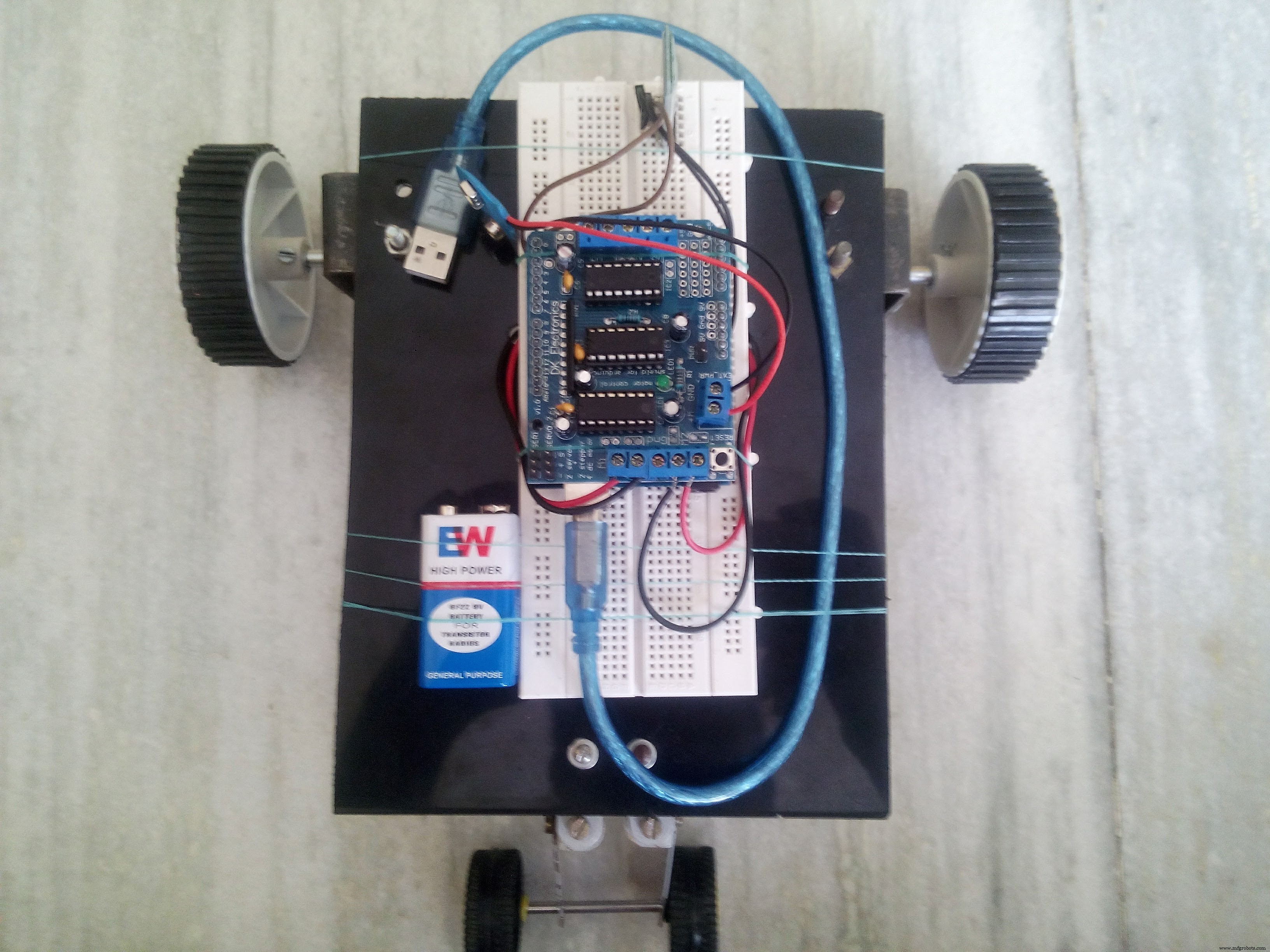
Siga el esquema para hacer las conexiones. Así es como se verá después de que se establezcan todas las conexiones.
-> Fuente de alimentación
Ahora bien, esto es un poco crucial.
Para alimentar el Arduino Uno se utiliza un banco de energía con voltaje de salida de 5v. Esto no es suficiente para impulsar esos motores de 12 V CC. Entonces necesitamos una fuente de energía adicional.
Usé dos baterías de 9v en serie para obtener un suministro de 18v. El principal problema aquí era que aquí también se requería una buena cantidad de corriente.
Mis baterías no podían suministrar suficiente corriente y, por lo tanto, el rendimiento de este automóvil no fue 100% satisfactorio. Funcionaba, pero los motores funcionaban a muy baja velocidad.
Así que recomiendo usar una batería de 12v o de lo contrario tendrías que comprometer la velocidad.
-> Código
Aquí usaremos la dirección de rotación de los motores para controlar la dirección del automóvil.
Adelante:ambos motores se mueven en dirección de avance
Hacia atrás:ambos motores se mueven hacia atrás
Izquierda:el motor izquierdo se mueve hacia atrás y el motor derecho se mueve hacia adelante
Derecha:el motor izquierdo se mueve hacia adelante y el motor derecho se mueve hacia atrás
Detener:ambos motores se detienen
void forward () {motor1.run (FORWARD); motor2.run (ADELANTE);} void hacia atrás () {motor1.run (HACIA ATRÁS); motor2.run (HACIA ATRÁS);} void left () {motor1.run (HACIA ATRÁS); motor2.run (ADELANTE);} void right () {motor1.run (ADELANTE); motor2.run (HACIA ATRÁS);} void Stop () {motor1.run (LIBERAR); motor2.run (LIBERAR);}
----------------------------------------------- ---------------------------------------
¡Así que eso fue todo!
1. Simplemente cargue el código en Arduino.
2. Realice las conexiones.
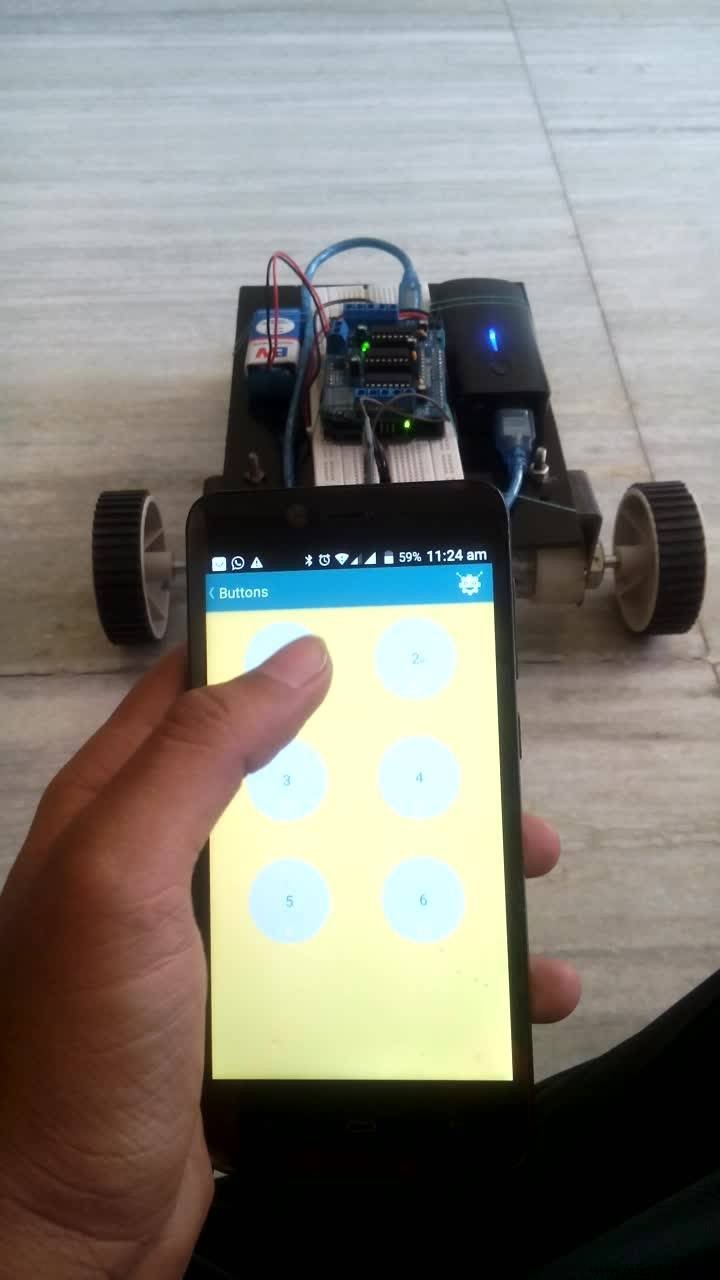
3. Inicie la aplicación.
4. Conecte su teléfono al automóvil.
¡Aquí está nuestra BELLEZA terminada!

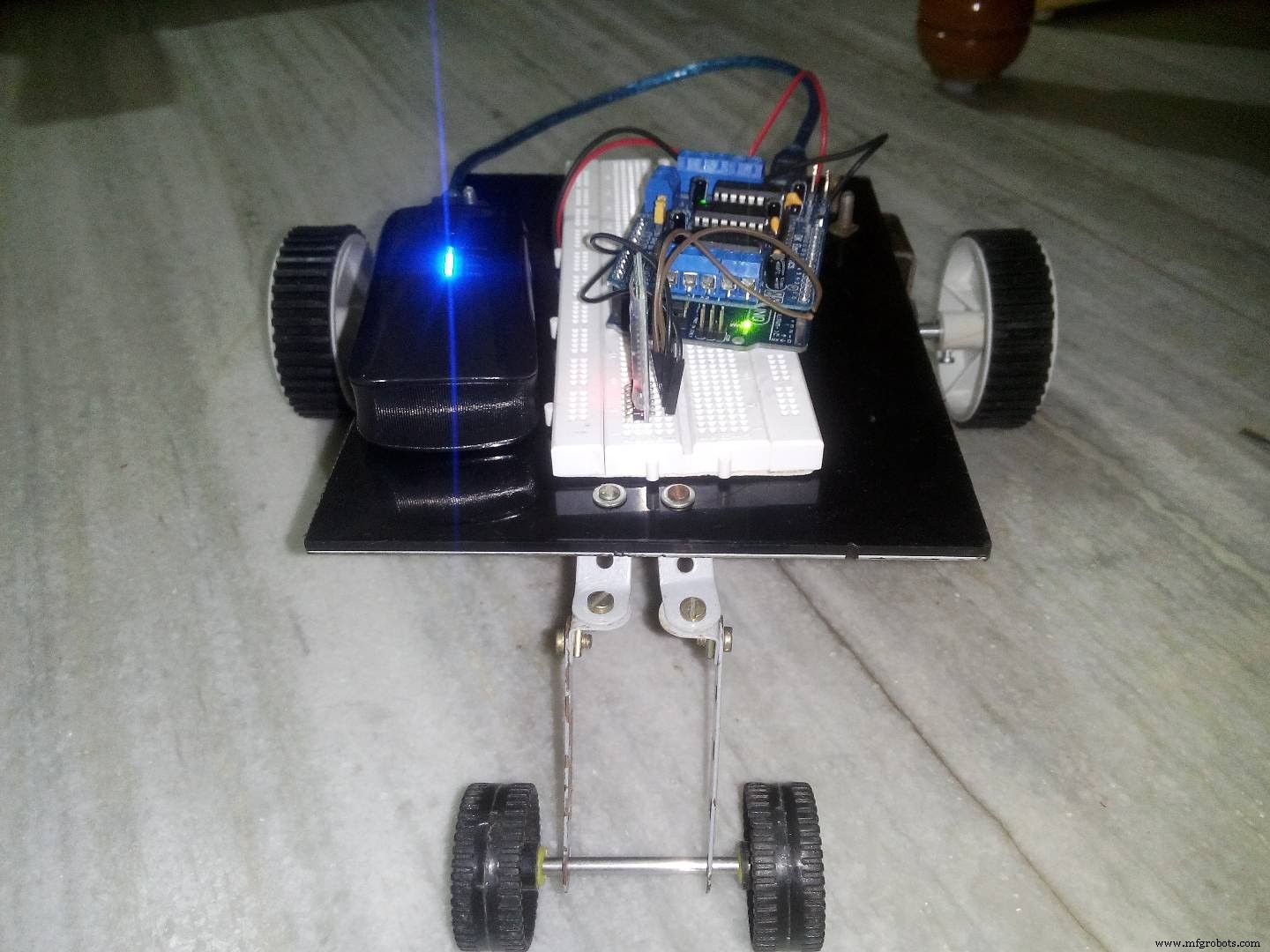
Espero que este tutorial haya sido lo suficientemente bueno para empezar. Si tiene alguna sugerencia para algunos cambios o adiciones adicionales a este proyecto, hágamelo saber en la sección de comentarios.
Código
- El código
El código C / C ++
Este código debe cargarse en Arduino Uno#includeAF_DCMotor motor1 (1); // motor1 es el motor izquierdo AF_DCMotor motor2 (2); // motor2 es el motor correcto int val; void setup () {Serial.begin (9600); motor1.setSpeed (255); // la velocidad del motor está configurada motor2.setSpeed (255); Stop ();} void loop () {bt =Serial.read (); if (val =='1') // cuando el módulo bluetooth recibe 1, el coche avanza {forward (); } if (val =='2') // cuando el módulo bluetooth recibe 2, el coche se mueve hacia atrás {backward (); } if (val =='3') // cuando el módulo bluetooth recibe 3, el coche se mueve a la izquierda {left (); } if (val =='4') // cuando el módulo bluetooth recibe 4, el coche se mueve a la derecha {right (); } if (val =='5') // cuando el módulo bluetooth recibe 5 el coche se detiene {Stop (); }} void forward () {motor1.run (FORWARD); motor2.run (ADELANTE);} void hacia atrás () {motor1.run (HACIA ATRÁS); motor2.run (HACIA ATRÁS);} void left () {motor1.run (HACIA ATRÁS); motor2.run (ADELANTE);} void right () {motor1.run (ADELANTE); motor2.run (HACIA ATRÁS);} void Stop () {motor1.run (LIBERAR); motor2.run (LIBERACIÓN);}
Esquemas
Estas son las conexiones. Conecte la fuente de alimentación de 12v al protector del controlador del motor. Tenga en cuenta que el esquema no incluye la fuente de alimentación externa.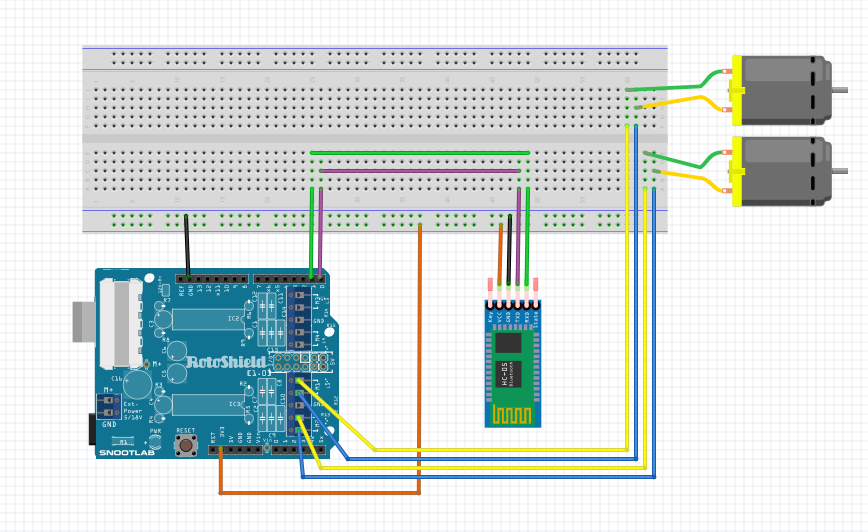
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Convierte tu coche RC en coche RC Bluetooth
- Coche RC controlado por joystick
- ¡Arduino con Bluetooth para controlar un LED!
- Calculadora UNO simple
- Robot controlado por voz
- Persistencia de la visión
- Dispositivos Bluetooth controlados por voz con OK Google
- Wi-Servo:Servomotores Wi-Fi controlados por navegador
- RC Porsche Car (Proyecto Arduino)
- Trackpad USB controlado por Arduino