


Controla el brazo del robot Arduino con la aplicación de Android
Componentes y suministros
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicaciones y servicios en línea
| ||||
 |
|
Acerca de este proyecto
Este tutorial se basa en los recursos de esta página.
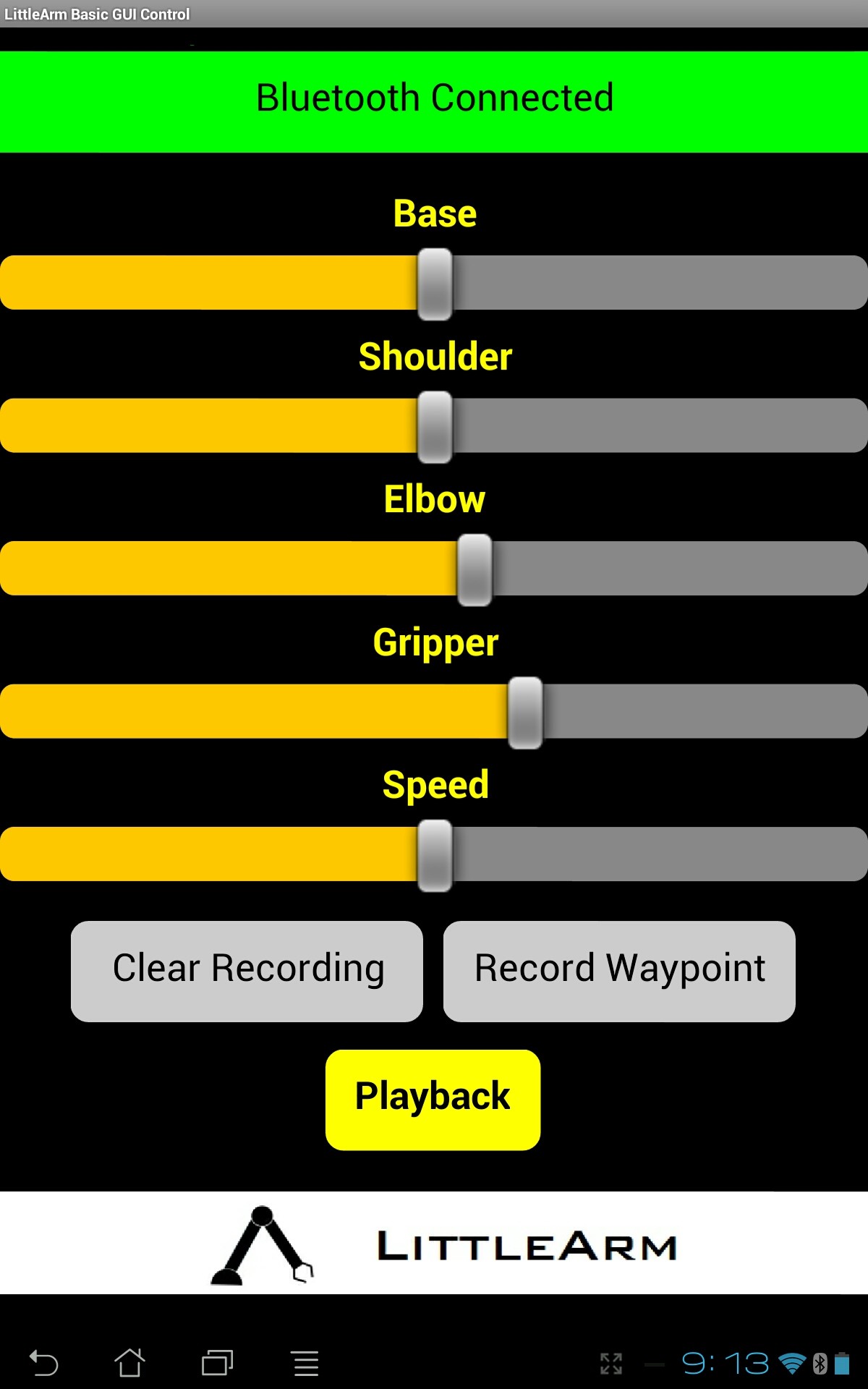
LittleArm se controla tradicionalmente mediante una aplicación de computadora de escritorio gratuita que se ejecuta en Windows y Linux. Pero esto requiere que el LittleArm esté conectado a una computadora para ser controlado. Finalmente completamos la aplicación para LittleArm para que puedas controlar el Arduino de forma inalámbrica con Bluetooth.
La aplicación te permite controlar todos los DOF del LittleArm, pero también grabar conjuntos de comandos y reproducirlos. El código para Arduino no cambia de nuestro código tradicional en los paquetes de software de aquí.
La aplicación LittleArm para este proyecto se puede descargar aquí.
Código
- código Arduino
Código Arduino Arduino
Este código se puede utilizar con la aplicación de escritorio o Android a través de bluetooth o usb#include// biblioteca arduino # incluye // biblioteca c estándar # define PI 3.141Servo baseServo; Servo hombroServo; Codo servoServo; Servo gripperServo; comando int; struct jointAngle {int base; int hombro; int codo;}; int deseadoGrip; int agarrePos; int deseadoDelay; int servoSpeed =15; int listo =0; struct jointAngle deseadoAngle; // ángulos deseados de los servos // ++++++++++++++++ DECLARACIONES DE FUNCIONES ++++++++++++++++++++++++ +++ int servoParallelControl (int thePos, Servo theServo); // +++++++++++++++++++++++++++++++++ ++++++++++++++++++++++++ configuración vacía () {Serial.begin (9600); baseServo.attach (9); // conecta el servo en el pin 9 al objeto servo shoulderServo.attach (10); elbowServo.attach (11); gripperServo.attach (6); Serial.setTimeout (50); // asegura que el arduino no lee el serial por mucho tiempo Serial.println ("iniciado"); baseServo.write (90); // posiciones iniciales de los servos shoulderServo.write (150); elbowServo.write (110); ready =0;} // arduino loopvoid primario loop () {if (Serial.available ()) {ready =1; deseadoAngle.base =Serial.parseInt (); deseadoAngle.shoulder =Serial.parseInt (); deseadoAngle.elbow =Serial.parseInt (); deseadoGrip =Serial.parseInt (); deseadoDelay =Serial.parseInt (); if (Serial.read () =='\ n') {// si el último byte es 'd' entonces detenga la lectura y ejecute el comando 'd' significa 'done' Serial.flush (); // borra todos los demás comandos apilados en el búfer // envía la finalización del comando Serial.print ('d'); }} int status1 =0; int status2 =0; int status3 =0; int status4 =0; int hecho =0; while (hecho ==0 &&listo ==1) {// mueve el servo a la posición deseada status1 =servoParallelControl (deseadoAngle.base, baseServo, deseadoDelay); status2 =servoParallelControl (ángulo deseado.hombro, hombroServo, retraso deseado); status3 =servoParallelControl (ángulo deseado. codo, codoServo, retraso deseado); status4 =servoParallelControl (deseadoGrip, gripperServo, deseadoDelay); if (estado1 ==1 &estado2 ==1 &estado3 ==1 &estado4 ==1) {hecho =1; }} // fin del tiempo} // +++++++++++++++++++++++++++++ DEFITNICIONES DE FUNCIONES ++++++++ +++++++++++++++++++++++++++++++++ int servoParallelControl (int thePos, Servo theServo, int theSpeed) {int startPos =theServo.read (); // lee la posición actual int newPos =startPos; // int theSpeed =velocidad; // define dónde está la posición con respecto al comando // si la posición actual es menor que el movimiento real hacia arriba if (startPos <(thePos-5)) {newPos =newPos + 1; theServo.write (newPos); retraso (theSpeed); return 0; } else if (newPos> (thePos + 5)) {newPos =newPos - 1; theServo.write (newPos); retraso (theSpeed); return 0; } else {return 1; }}
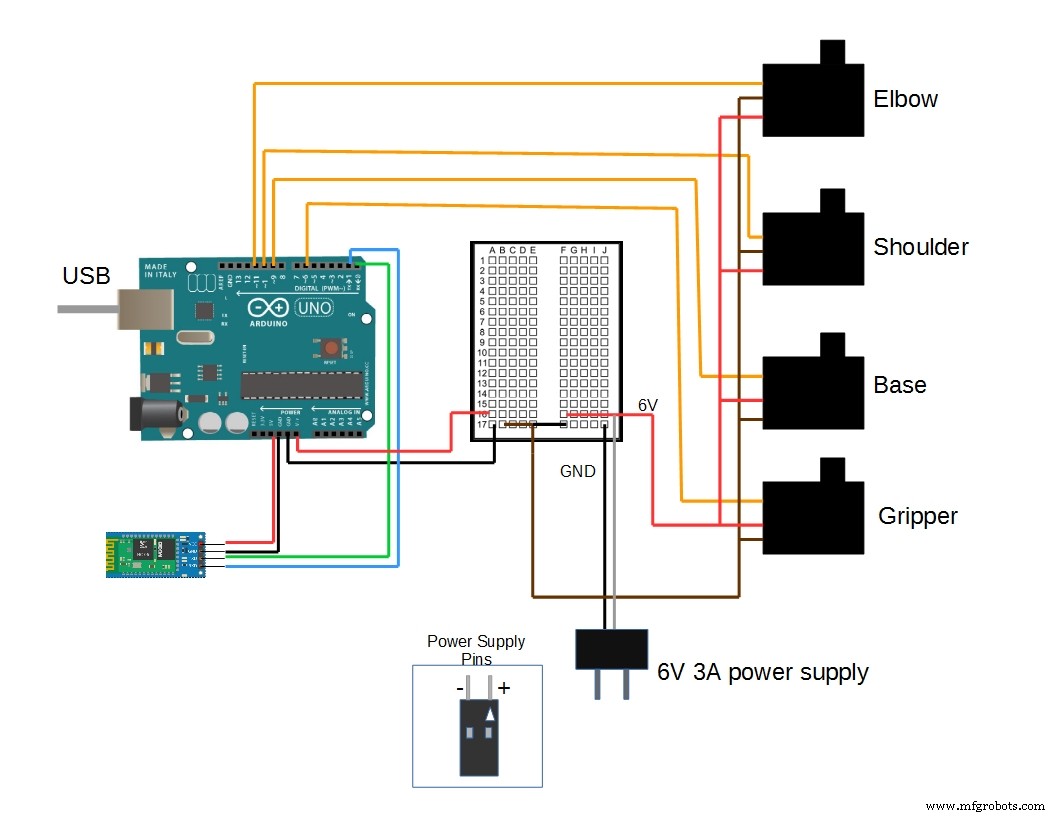
Esquemas
Proceso de manufactura
- Control remoto universal usando Arduino, 1Sheeld y Android
- Controlar el aceptador de monedas con Arduino
- Uso de IoT para controlar de forma remota un brazo robótico
- Obstáculos que evitan el robot con servomotor
- ¡Arduino con Bluetooth para controlar un LED!
- Controlar un robot Roomba con Arduino y un dispositivo Android
- Brazo robótico controlado por Nunchuk (con Arduino)
- Arduino Nano:Controla 2 motores paso a paso con joystick
- Littlearm 2C:Construya un brazo robótico Arduino impreso en 3D
- ThimbleKrox - Control del mouse con los dedos
- Controla una cucaracha con Arduino por menos de $ 30