


Trackpad USB controlado por Arduino
Componentes y suministros
 |
| × | 1 |
Aplicaciones y servicios en línea
 |
|
Acerca de este proyecto
Cada vez que sale una nueva Raspberry Pi, echo un vistazo a las especificaciones y pienso:"Realmente quiero hacer una computadora portátil con eso", pero siempre surge un problema y es que nunca puedo encontrar un trackpad USB independiente para el portatil. Entonces, en este proyecto, recuperaremos un trackpad de una vieja computadora portátil rota y lo convertiremos en un dispositivo USB usando un Arduino Pro Micro.
Paso 1:piezas

Las partes necesarias para este proyecto son realmente simples, necesitaremos un trackpad de una computadora portátil vieja, un micro Arduino y algo de cable. Desafortunadamente, solo hay algunos sabores de Arduino que podemos usar, estos son Arduino micro, pro micro y Leonardo, ya que pueden programarse para aparecer como HID (dispositivos de interfaz humana), lo que significa que pueden aparecer en la computadora como un ratón o teclado. Esto es algo que Arduino Uno no puede hacer. Puede obtener el Arduino pro micro aquí:Aquí En cuanto al trackpad, si prefiere comprar uno, puede encontrarlo aquí:Aquí
Paso 2:¿Por qué funciona esto?

Entonces, la razón por la que podemos conectar un trackpad con un Arduino es porque la mayoría de los trackpads de las computadoras portátiles más antiguas se comunicaban con la computadora a través de una interfaz PS / 2, lo que significa que el circuito del trackpad tiene salidas PS / 2 que son datos y reloj, estos datos luego son leídos por Arduino y convertirse en datos que se pueden enviar a la computadora a través de la interfaz USB. Ahora tengo que señalar que no todos los trackpads de las computadoras portátiles son iguales, casi todas las computadoras portátiles antiguas usan una interfaz PS / 2, pero algunas más nuevas usan una interfaz USB en lugar de la interfaz PS / 2. Si logra encontrar uno de estos trackpads USB en lugar del PS / 2, simplemente puede buscar en Google el nombre del trackpad y encontrar el pinout USB y conectarlo a una computadora USB y funcionará. Sin embargo, para este proyecto usaremos el trackpad PS / 2 más común y usaremos un Arduino para convertirlo en un mouse USB.
Paso 3:cableado



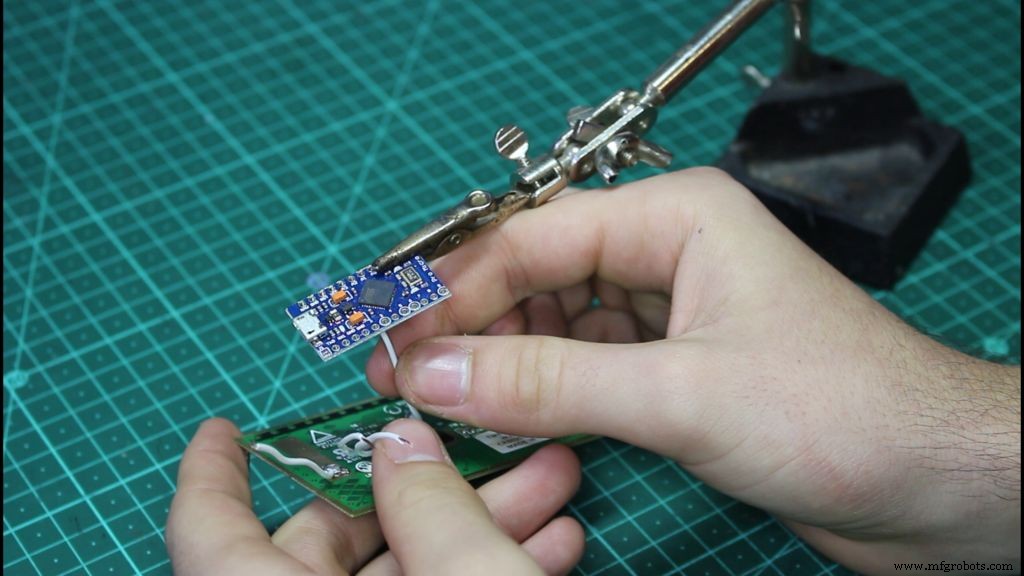
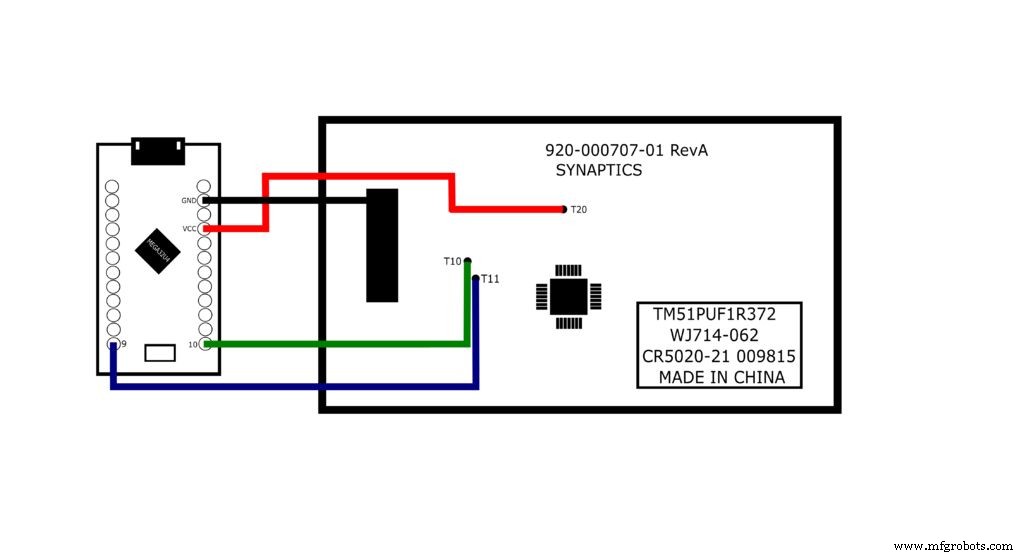
El cableado para este proyecto es bastante fácil, todo lo que tenemos que hacer es encontrar 4 almohadillas de soldadura en nuestro trackpad. Estos son bastante fáciles de encontrar ya que están etiquetados como T10 (datos), T11 (reloj) y T20 y la conexión a tierra es solo un gran plano de metal expuesto. Necesitamos soldar con cuidado un cable a cada una de estas almohadillas y luego conectarlas a sus pines Arduino correspondientes.
- T10 se conecta al pin 10 en el micro Arduino
- T11 se conecta al pin 9 en el micro Arduino
- T20 se conecta a 5v en el micro Arduino
- El plano de tierra se conecta a tierra en el micro Arduino
Después de haber soldado los cables a las almohadillas del trackpad, es crucial que no ejerza ninguna presión sobre estas almohadillas, incluso la más mínima presión sobre las almohadillas puede arrancarlas por completo y hacer que su trackpad sea inútil. Es mejor cubrir su conexión con pegamento caliente después de haberla soldado.
Paso 4:instalación de algunas bibliotecas
Para este proyecto, necesitaremos instalar dos bibliotecas en el IDE de Arduino, estas bibliotecas son:
- Biblioteca de mouse:aquí
- Biblioteca PS / 2:aquí
Descárgalos, abre el archivo de la biblioteca de tu Arduino IDE y colócalos. La biblioteca PS / 2 se usa para obtener los datos del trackpad y la biblioteca del mouse nos permite tomar esos datos y convertirlos en comandos del mouse que la computadora puede leer. el puerto USB.
Paso 5:el código
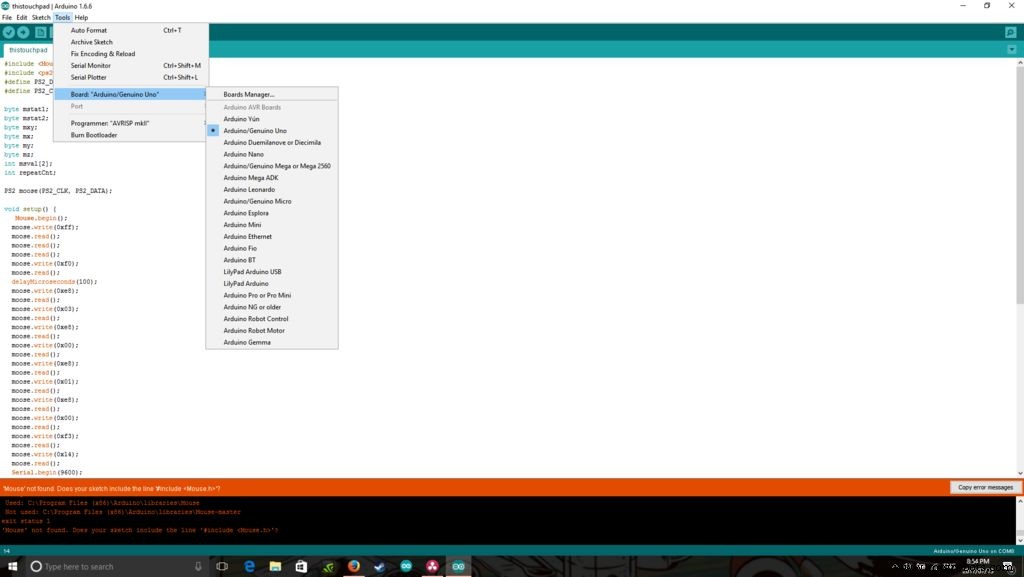
Ahora que tenemos las bibliotecas instaladas, podemos cargar nuestro código en Arduino, el código se puede encontrar a continuación, sin embargo, debo tener en cuenta que el código no se cargará ni se compilará a menos que la placa seleccionada en las herramientas sea Arduino micro o Leonardo, así que manténgalo en tenga en cuenta si obtiene un error al compilar el código. Una vez que se carga el código, Arduino debería reiniciarse como un dispositivo HID y aparecer en la computadora como un mouse.
thistouchpad.ino
Paso 6:Finalización y solución de problemas
Entonces, cuando toque el panel táctil, debería obtener algo de movimiento en la pantalla y, dado que Arduino está actuando como un dispositivo USB, puede conectarlo a cualquier computadora y se iniciará instantáneamente como un mouse USB, independientemente del sistema operativo o tipo de computadora. . Ahora, si no desea pasar por el proceso de programación y cableado del Arduino, puede simplemente comprar un convertidor de PS / 2 a USB, pero no lo recomendaría ya que he leído que esto interfiere con los datos que provienen de el trackpad y puede inutilizarlo, además, al usar un Arduino podemos personalizar completamente todo lo relacionado con el mouse según nuestras preferencias, como la velocidad del mouse y las acciones como el doble toque y el desplazamiento, se puede encontrar información sobre cómo puede personalizar completamente el suyo en la página del mouse Arduino aquí.
Si su trackpad no está enviando datos, puede ser una solución fácil, eche un vistazo a la parte posterior del trackpad e intente ubicar un número de pieza, luego puede buscar en Google este número de pieza con la palabra pinout y debería mostrarle dónde están los datos. , el reloj y los pines de 5 voltios son.
Muchas gracias por leer como siempre. Si tiene alguna pregunta, déjela en los comentarios y haré todo lo posible para responderle.
Código
- Código
Código Arduino
pegar en arduino ide#include#include #define PS2_DATA 10 # define PS2_CLK 9byte mstat1; byte mstat2; byte mxy; byte mx; byte mi; byte mz; int msval [2]; int repeatCnt; PS2 moose (PS2_CLK, PS2_DATA); configuración vacía () {Mouse.begin (); moose.write (0xff); moose.read (); moose.read (); moose.read (); moose.write (0xf0); moose.read (); delayMicroseconds (100); moose.write (0xe8); moose.read (); moose.write (0x03); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x01); moose.read (); moose.write (0xe8); moose.read (); moose.write (0x00); moose.read (); moose.write (0xf3); moose.read (); moose.write (0x14); moose.read (); Serial.begin (9600);} void ms_read () {moose.write (0xeb); moose.read (); mstat1 =moose.read (); mxy =moose.read (); mz =moose.read (); mstat2 =moose.read (); mx =moose.read (); mi =alce.read (); msval [0] =(((mstat2 &0x10) <<8) | ((mxy &0x0F) <<8) | mx); msval [1] =(((mstat2 &0x20) <<7) | ((mxy &0xF0) <<4) | my); msval [2] =int (mz);} bucle vacío () {ms_read (); if (msval [0]> 0 y msval [2]> 10) {repeatCnt ++; } más {repeatCnt =0; } si (repeatCnt> 2) {msval [0] =mapa (msval [0], 580, 5164, -1023, 1023); msval [1] =mapa (msval [1], 1120, 5967, 1023, -1023); Mouse.move (msval [0] / 200, msval [1] / 200); }}
Proceso de manufactura
- Robot Raspberry Pi controlado por Bluetooth
- Luz de mesa interactiva controlada por gestos
- Juguete controlado por Android con Raspberry Motor Shield
- LED controlados por Alexa a través de Raspberry Pi
- Coche RC controlado por joystick
- Brazo robótico controlado por Nunchuk (con Arduino)
- Robot controlado por voz
- MobBob:Robot Arduino DIY controlado por un teléfono inteligente Android
- Dispositivos Bluetooth controlados por voz con OK Google
- Robot de piano controlado por Arduino:PiBot
- Wi-Servo:Servomotores Wi-Fi controlados por navegador